1.本发明涉及激光焊接领域,尤其涉及一种总线型激光焊接系统。
背景技术:
2.随着半导体,光伏和新能源锂电池产业的快速发展,激光器的焊接应用范围更加广阔,应用场景更加丰富。例如焊接动力锂电池外壳、电池片和车身动力总成等。
3.传统的激光焊接方式是采用单光束焊接,焊接速度慢,质量不好把控,自动化水平低,需要人为操作生产效率低,且因为伴随着周期性匙孔不稳定性容易产生金属物飞溅,污染环境,同时也导致焊缝里面有气泡,焊接强度降低。
技术实现要素:
4.本发明实施例旨在提供一种总线型激光焊接系统,旨在解决目前传统单光束焊接方式焊接速度慢,质量不好把控,自动化水平低,需要人为操作生产效率低的问题。
5.为解决上述技术问题,本发明实施例提供一种总线型激光焊接系统,所述总线型激光焊接系统包括多光束激光控制系统、焊接振镜控制系统和振镜加工头;其中:所述多光束激光控制系统与所述振镜加工头电性连接,用于实现总线通讯对接客户的主站系统,以及实时控制输出多光束激光给所述振镜加工头;所述焊接振镜控制系统分别与所述多光束激光控制系统和所述振镜加工头电性连接,用于控制所述振镜加工头实现对焊接位置的轨迹规划,以及分析焊接完成的焊接状态,反馈给所述多光束激光控制系统;所述振镜加工头,用于接收所述多光束激光控制系统输出的多光束激光,以及接收所述焊接振镜控制系统输出的对焊接位置的轨迹规划,实现对焊接工件的焊接。
6.可选地,所述多光束激光控制系统包括总线卡、多模主控、内环激光器、中环激光器、外环激光器和合束器;其中:所述总线卡,用于通过总线直接对接客户的主站系统,接收客户通过总线下发的激光焊接任务;所述多模主控与所述总线卡电性连接,用于处理来自所述总线卡通过总线下发的所述激光焊接任务;所述内环激光器与所述多模主控电性连接,用于接收并管理所述多模主控传输的所述激光焊接任务和输出内环激光光束;所述中环激光器与所述多模主控电性连接,用于接收并管理所述多模主控传输的所述激光焊接任务和输出中环激光光束;所述外环激光器与所述多模主控电性连接,用于接收并管理所述多模主控传输的所述激光焊接任务和输出外环激光光束;所述合束器分别与所述内环激光器、所述中环激光器、所述外环激光器和所述多模主控电性连接,用于将所述内环激光器输出的所述内环激光光束、所述中环激光器输出
的所述中环激光光束和所述外环激光器输出的所述外环激光光束合束形成多光束激光输出到光纤中,并采集所述内环激光器、所述中环激光器和所述外环激光器输出的激光光束的功率形成合束激光输出功率,将所述合束激光输出功率反馈给所述多模主控;所述多模主控还用于对所述合束激光输出功率进行闭环控制。
7.可选地,所述多模主控包括第一控制器和第二控制器,其中:所述第一控制器与所述总线卡电性连接,通过协议栈与所述总线卡进行数据交互,处理来自客户通过总线下发的激光焊接任务;所述第二控制器分别与所述第一控制器、所述内环激光器、所述中环激光器、所述外环激光器电性连接,用于处理所述内环激光器、所述中环激光器、所述外环激光器的出光实时信号和对合束激光输出功率进行闭环控制。
8.可选地,所述内环激光器、中环激光器和外环激光器均包括驱动板、光模块、第三控制器和第四控制器;所述第三控制器与所述多模主控电性连接,用于接受所述多模主控的控制,管理所述多模主控传输过来的激光焊接任务;所述第四控制器,用于输出出光实时信号给所述驱动板,接收所述驱动板反馈回来的恒流驱动和电流电压,在所述第四控制器与所述驱动板之间形成激光器的第一级闭环,以及接收所述光模块反馈的输出功率,在所述第四控制器与所述光模块之间形成激光器的第二级闭环;所述驱动板与所述光模块电性连接,用于根据所述第四控制器输出的出光实时信号输出恒流驱动和采集电流电压,并传输给所述第四控制器;所述光模块,用于根据所述驱动板的驱动输出激光光束并采集激光光束的功率,并将所述激光光束的功率反馈给所述第四控制器。
9.可选地,所述多模主控还包括外控接口,在所述合束器输出多光束激光给所述振镜加工头后,所述第一控制器用于通过所述外控接口采集所述振镜加工头的加工功率。
10.可选地,所述多光束激光控制系统还包括功率波形编辑卡,所述功率波形编辑卡与所述多模主控电性连接,所述功率波形编辑卡的内部烧录有激光器波形编辑软件,所述激光器波形编辑软件用于对所述内环激光器、所述中环激光器和所述外环激光器的激光光束的输出功率进行编辑。
11.可选地,所述焊接振镜控制系统包括视觉摄像头和焊接卡;其中:所述视觉摄像头与所述焊接卡电性连接,用于获取焊接前焊接工件位置的图像、焊接过程中焊缝和熔池的图像,以及焊接完成后焊接工件的图像,传输给所述焊接卡;所述焊接卡,用于根据所述焊接前焊接工件位置的图像定位补偿焊接工件的位置,控制所述振镜加工头实现对焊接位置的轨迹规划,根据所述焊接过程中焊缝和熔池的图像实时动态调整工艺参数,根据所述焊接完成后焊接工件的图像分析判断焊接工件的焊接状态。
12.可选地,所述焊接卡的内部烧录有工艺编辑软件,所述工艺编辑软件用于对焊接工件的焊接工艺程序进行编辑。
13.可选地,所述焊接卡还与所述总线卡电性连接,所述焊接卡的报警状态通过所述总线卡的总线传输给客户的主站系统。
14.可选地,所述总线型激光焊接系统还包括加工件外围辅助系统,所述加工件外围辅助系统用于辅助所述振镜加工头完成焊接工件的焊接。
15.与现有技术相比较,本发明实施例提供的一种总线型激光焊接系统,通过提供一种总线型激光焊接系统,包括多光束激光控制系统、焊接振镜控制系统和振镜加工头,所述多光束激光控制系统实现总线通讯对接客户的主站系统,可以使总线型激光焊接系统可以通过总线直接对接客户的主站系统,可以配合客户的自动化产线实现高效焊接作业,自动化水平高;所述多光束激光控制系统实时控制输出多光束激光给所述振镜加工头,所述振镜加工头根据所述多光束激光控制系统输出的多光束激光结合所述焊接振镜控制系统对焊接位置的轨迹规划和分析焊接完成的焊接状态,可以优化调整焊缝和熔池宽度和深度,对焊接光束有更加精细和稳定的控制策略,可产生更稳定的匙孔,提升焊接质量,降低残次率。从而使总线型激光焊接系统可以满足高端焊接应用和发展的大趋势。
附图说明
16.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
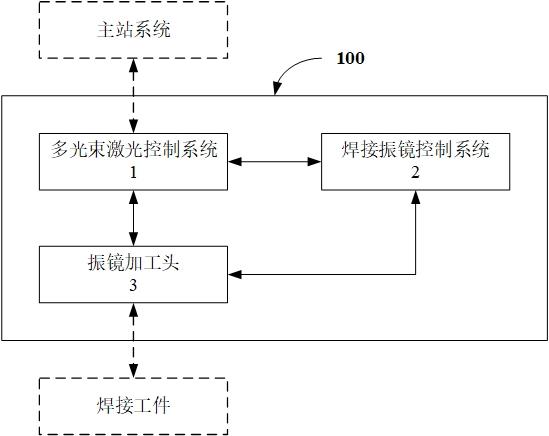
17.图1是本发明实施例提供的一种总线型激光焊接系统的结构示意图;图2是本发明实施例提供的一种总线型激光焊接系统中多光束激光控制系统的结构示意图;图3是本发明实施例提供的一种总线型激光焊接系统中激光器的结构示意图;图4是本发明实施例提供的一种总线型激光焊接系统中合束器进行激光光束合束成多光束激光的示意图;图5是本发明实施例提供的一种总线型激光焊接系统中焊接振镜控制系统的结构示意图;图6是本发明实施例提供的一种总线型激光焊接系统的另一结构示意图。
具体实施方式
18.为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“内”、“外”、“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
19.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本说明书中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
20.此外,下面所描述的本发明不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
21.在一个实施例中,如图1所示,本发明提供一种总线型激光焊接系统,所述总线型激光焊接系统100包括:多光束激光控制系统1、焊接振镜控制系统2和振镜加工头3;其中:所述多光束激光控制系统1与所述振镜加工头3电性连接,用于实现总线通讯对接客户的主站系统,以及实时控制输出多光束激光给所述振镜加工头3;所述焊接振镜控制系统2分别与所述多光束激光控制系统1和所述振镜加工头3电性连接,用于控制所述振镜加工头3实现对焊接位置的轨迹规划,以及分析焊接完成的焊接状态,反馈给所述多光束激光控制系统1;所述振镜加工头3分别与所述多光束激光控制系统1和所述焊接振镜控制系统2连接,用于接收所述多光束激光控制系统1输出的多光束激光,以及接收所述焊接振镜控制系统2输出的对焊接位置的轨迹规划,实现对焊接工件的焊接。
22.在本实施例中,通过提供一种总线型激光焊接系统,包括多光束激光控制系统1、焊接振镜控制系统2和振镜加工头3;所述多光束激光控制系统1实现总线通讯对接客户的主站系统,可以使总线型激光焊接系统可以通过总线直接对接客户的主站系统,可以配合客户的自动化产线实现高效焊接作业,自动化水平高;所述多光束激光控制系统1实时控制输出多光束激光给所述振镜加工头3,所述振镜加工头3根据所述多光束激光控制系统1输出的多光束激光结合所述焊接振镜控制系统2对焊接位置的轨迹规划和分析焊接完成的焊接状态,可以优化调整焊缝和熔池宽度和深度,对焊接光束有更加精细和稳定的控制策略,可产生更稳定的匙孔,提升焊接质量,降低残次率。从而使总线型激光焊接系统可以满足高端焊接应用和发展的大趋势。
23.在一个实施例中,如图2所示,所述多光束激光控制系统1包括:总线卡11、多模主控12、内环激光器13、中环激光器14、外环激光器15和合束器16;其中:所述总线卡11,用于通过总线直接对接客户的主站系统,接收客户通过总线下发的激光焊接任务;所述多模主控12,与所述总线卡11电性连接,用于处理来自所述总线卡11通过总线下发的激光焊接任务;所述内环激光器13,与所述多模主控12电性连接,用于接收并管理所述多模主控12传输的所述激光焊接任务和输出内环激光光束及其输出功率;所述中环激光器14,与所述多模主控12电性连接,用于接收并管理所述多模主控12传输的所述激光焊接任务和输出中环激光光束及其输出功率;所述外环激光器15,与所述多模主控12电性连接,用于接收并管理所述多模主控12传输的所述激光焊接任务和输出外环激光光束及其输出功率;所述合束器16,分别与所述内环激光器13、中环激光器14和外环激光器15和所述多模主控12电性连接,用于将内环激光器13输出的内环激光光束、中环激光器14输出的中环激光光束和外环激光器15输出的外环激光光束合束形成多光束激光输出到光纤中,并采集所述内环激光器13、中环激光器14和外环激光器15输出的激光光束的功率形成合束激光输出功率,将所述合束激光输出功率反馈给所述多模主控12;所述多模主控12还用于对所述合束激光输出功率进行闭环控制。
24.在本实施例中,通过提供一种多光束激光控制系统,总线卡11通过总线直接对接客户的主站系统,接收客户通过总线下发的激光焊接任务,多模主控12处理来自所述总线卡11通过总线下发的激光焊接任务,内环激光器13、中环激光器14和外环激光器15分别根据所述多模主控12的控制管理激光焊接任务和各自输出激光光束及其输出功率,合束器16将内环激光器13输出的内环激光光束、中环激光器14输出的中环激光光束和外环激光器15输出的外环激光光束合束形成多光束激光输出到光纤中,并通过所述合束器16内部设置的第一光功率传感器采集所述内环激光器13、中环激光器14和外环激光器15输出的激光光束的功率形成合束激光输出功率,将所述合束激光输出功率反馈给所述多模主控12,所述多模主控12对所述合束激光输出功率进行闭环控制。从而可以使多光束激光控制系统通过总线直接对接客户的主站系统,可以配合自动化产线实现高效焊接作业,提升焊接质量,降低残次率。且通过使用总线连接可以解决目前的焊接系统中各个模块之间采用外控io接线,导致系统接线繁琐,容易出错,故障率高,问题定位麻烦的问题。
25.在一个实施例中,所述总线卡11用于通过总线直接对接客户的主站系统,接收客户通过总线下发的激光焊接任务。
26.具体地,所述总线卡11,用于通过总线直接对接客户的主站系统,接收客户通过总线下发的激光焊接任务,以及实时反馈所述内环激光器13、中环激光器14和外环激光器15的焊接状态及过程数据。
27.作为示例性,所述总线卡11的总线使用ethercat总线,所述ethercat总线使用的协议栈包括coe+foe协议栈。
28.ethercat是一个开放架构,以以太网为基础的现场总线系统,其名称中的cat为控制自动化技术(control automation technology)字首的缩写。ethercat是确定性的工业以太网,最早是由德国的beckhoff(倍福)公司研发。ethercat使用相同的物理和数据链路层。在ethercat中,主站和子站都属于网络中的节点,主站发送数据,整个网络只有一个数据帧依次将通过每个节点。主站是唯一允许发送帧的节点,子站只能是转发帧的节点。数据帧从主站发出,途经各个子站,把对于子站的数据放下或者带上,最后回到主站。
29.在一个实施例中,所述多模主控12分别与所述总线卡11、所述内环激光器13、中环激光器14和外环激光器15电性连接,用于处理来自客户通过总线下发的激光焊接任务和处理所述内环激光器13、中环激光器14、外环激光器15的非实时的外控信号和出光实时信号,以及对合束后的合束激光输出功率进行闭环控制。
30.具体地,如图2所示,所述多模主控12包括第一控制器121和第二控制器122,其中:所述第一控制器121,分别与所述总线卡11、所述内环激光器13、中环激光器14、外环激光器15和所述第二控制器122电性连接,用于处理来自所述总线卡11、所述内环激光器13、中环激光器14、外环激光器15和/或所述第二控制器122的数据交互。
31.具体地,所述第一控制器121与所述总线卡11电性连接,通过协议栈与所述总线卡11进行数据交互,处理来自客户通过总线下发的激光焊接任务。作为示例性,所述协议栈包括coe(can application protocol over ethercat,ethercat应用层协议实现)+foe(file access over ethercat,ethercat节点上文件传输)协议栈。
32.所述第一控制器121与所述内环激光器13、中环激光器14和外环激光器15电性连接,通过预设通讯接口与所述内环激光器13、中环激光器14和外环激光器15进行数据交互,
处理所述内环激光器13、中环激光器14和外环激光器15的非实时外控信号。作为示例性,所述预设通讯接口为rs_485通讯接口。
33.所述第一控制器121,还用于处理对外的人机交互的启动出光按键、指示灯、蜂鸣器,以及采集处理水流量、温湿度电压电流传感器数据。
34.所述第二控制器122,分别与所述第一控制器121、所述内环激光器13、中环激光器14和外环激光器15电性连接,用于处理所述内环激光器13、中环激光器14和外环激光器15的出光实时信号,控制功率波形独立编辑输出以及对合束激光输出功率进行闭环控制。
35.作为示例性,所述第一控制器121为arm(advanced risc machines,先进risc微处理器)架构的处理器,所述第二控制器122为fpga(field-programmable gate array,现场可编程门阵列)架构的控制器。
36.在一个实施例中,如图2所示,所述内环激光器13、中环激光器14和外环激光器15的开关光和功率均受所述多模主控12独立控制,且所述内环激光器13、中环激光器14和外环激光器15的结构和功能相同,区别在于光路部分采用多波长的激光光束,对激光光束的开关光时间和输出功率和发散范围在合束前做了不同的配置。
37.由于所述内环激光器13、中环激光器14和外环激光器15的结构和功能相同,以下就以统一以激光器为例对所述内环激光器13、中环激光器14和外环激光器15的结构和功能作统一的介绍。
38.具体地,如图3所示,激光器包括驱动板、光模块、第三控制器和第四控制器。
39.所述第三控制器,与所述多模主控12电性连接,用于接受所述多模主控12的控制,管理所述多模主控12传输过来的激光焊接任务。
40.所述第四控制器,用于输出出光实时信号控制所述驱动板,接收所述驱动板反馈回来的恒流驱动和电流电压,在所述第四控制器与所述驱动板之间形成激光器的第一级闭环,以及接收所述光模块反馈的输出功率,在所述第四控制器与所述光模块之间形成激光器的第二级闭环。
41.所述驱动板,与所述光模块电性连接,用于根据所述第四控制器输出的出光实时信号输出恒流驱动和采集电流电压,并将所述恒流驱动和所述电流电压传输给所述第四控制器,以使在所述第四控制器与所述驱动板之间形成激光器的第一级闭环。
42.也即:所述第四控制器输出出光实时信号控制所述驱动板,所述驱动板根据所述第四控制器输出的出光实时信号输出恒流驱动和采集电流电压,并将所述恒流驱动和所述电流电压传输给所述第四控制器,所述第四控制器接收所述驱动板反馈回来的恒流驱动和电流电压,从而在所述第四控制器与所述驱动板之间形成激光器的第一级闭环。
43.所述光模块,用于根据所述驱动板的驱动输出激光光束。所述光模块的内部安装有第三光功率传感器,所述第三光功率传感器用于采集激光光束的功率,反馈给所述第四控制器,在所述第四控制器与所述光模块之间形成激光器的第二级闭环。
44.也即:所述光模块根据所述驱动板的驱动输出激光光束,所述第三光功率传感器采集激光光束的功率,反馈给所述第四控制器,从而在所述第四控制器与所述光模块之间形成激光器的第二级闭环。
45.具体地,对于所述内环激光器13,所述光模块用于根据所述驱动板的驱动输出内环激光光束。对于所述中环激光器14,所述光模块用于根据所述驱动板的驱动输出中环激
光光束。对于所述外环激光器15,所述光模块用于根据所述驱动板的驱动输出外环激光光束。
46.作为示例性,所述第三控制器为arm架构的处理器,所述第四控制器为fpga架构的控制器。
47.在一个实施例中,所述合束器16,分别与所述内环激光器13、中环激光器14和外环激光器15和所述多模主控12电性连接,用于将内环激光器13输出的内环激光光束、中环激光器14输出的中环激光光束和外环激光器15输出的外环激光光束合束形成多光束激光输出到光纤中,并采集所述内环激光器13、中环激光器14和外环激光器15输出的激光光束的功率形成合束激光输出功率,将所述合束激光输出功率反馈给所述多模主控12。
48.具体地,如图4所示。所述合束器16分别与所述内环激光器13、中环激光器14和外环激光器15和所述多模主控12电性连接,将内环激光器13输出的内环激光光束a、中环激光器14输出的中环激光光束b和外环激光器15输出的外环激光光束c进行合束形成多光束激光输出到光纤中。所述合束器16输出的多光束激光就是包括内环激光光束a、中环激光光束b及外环激光光束c的多光束激光。
49.所述合束器16内部还设置有一个第一光功率传感器,所述第一光功率传感器用于采集所述内环激光器13、中环激光器14和外环激光器15输出的激光光束的功率形成合束激光输出功率,将所述合束激光输出功率反馈给所述多模主控12的所述第二控制器122,在所述多模主控12的所述第二控制器122和所述合束器16之间形成激光器的第三级闭环。
50.也即:所述合束器16的第一光功率传感器采集所述内环激光器13、中环激光器14和外环激光器15输出的激光光束的功率形成合束激光输出功率,然后所述合束激光输出功率反馈给所述多模主控12的所述第二控制器122,在所述多模主控12的所述第二控制器122和所述合束器16之间形成激光器的第三级闭环。
51.在一个实施例中,所述多模主控12还包括外控接口,在所述合束器16输出多光束激光给振镜加工头3后,所述多模主控12的第一控制器121通过所述外控接口采集所述振镜加工头3的加工功率,在使所述多模主控12的第一控制器121与振镜加工头3之间形成激光器的第四级闭环。
52.在一个实施例中,如图2所示,所述多光束激光控制系统1还包括功率波形编辑卡17,所述功率波形编辑卡17与所述多模主控12的所述第二控制器122电性连接,所述功率波形编辑卡17的内部烧录有激光器波形编辑软件,所述激光器波形编辑软件用于对所述内环激光器13、所述中环激光器14和所述外环激光器15的激光光束的输出功率进行编辑,最多可以编辑256组波形信息,编辑出来的波形信息保存在所述功率波形编辑卡17内。
53.在本实施例中,通过对焊接的内环激光器13、中环激光器14和外环激光器15的激光光束的输出功率进行编辑,可以优化由所述合束器16将内环激光器13、中环激光器14和外环激光器15的激光光束合束形成的多光束激光,从而优化调整焊缝和熔池宽度和深度,对焊接光束有更加精细和稳定的控制策略,可产生更稳定的匙孔,提升焊接质量,降低残次率。
54.在一个实施例中,所述焊接振镜控制系统2分别与所述多光束激光控制系统1和所述振镜加工头3电性连接,用于控制所述振镜加工头3实现对焊接位置的轨迹规划,以及分析焊接完成的焊接状态,反馈给所述多光束激光控制系统1。
55.具体地,如图5所示,所述焊接振镜控制系统2包括视觉摄像头221和焊接卡222;其中:所述视觉摄像头221与所述焊接卡222电性连接,用于获取焊接前焊接工件位置的图像、焊接过程中焊缝和熔池的图像,以及焊接完成后焊接工件的图像,并将获取到的所述焊接前焊接工件位置的图像、所述焊接过程中焊缝和熔池的图像,以及所述焊接完成后焊接工件的图像传输给所述焊接卡222。
56.具体地,所述视觉摄像头221通过视觉检测,对焊接工件的位置和焊接前后的图像进行标定。
57.所述焊接卡222,用于根据所述焊接前焊接工件位置的图像定位补偿焊接工件的位置,控制所述振镜加工头3实现对焊接位置的轨迹规划,根据所述焊接过程中焊缝和熔池的图像实时动态调整工艺参数,根据所述焊接完成后焊接工件的图像分析判断焊接工件的焊接状态。
58.具体地,所述焊接卡222的内部烧录有工艺编辑软件,所述工艺编辑软件用于对焊接工件的焊接工艺程序进行编辑,焊接工艺程序编辑好后,可以实现对所述振镜加工头3的振镜的xyz的位置控制和对所述内环激光器13、所述中环激光器14和所述外环激光器15的激光光束的产生和输出功率的占空比进行实时控制。
59.此外,所述焊接卡222还与所述多光束激光控制系统1的所述总线卡11电性连接,所述焊接卡222的报警状态可以通过所述总线卡11的总线传输给客户的主站系统。
60.所述第一控制器121还进一步用于处理所述焊接卡222的对外硬件io接口。
61.在本实施例中,通过视觉摄像头通过视觉检测,对焊接工件的位置和焊接前后的图像进行标定,使用焊接卡的内部的工艺编辑软件对焊接工件的焊接工艺程序进行编辑,可以实现对所述振镜加工头的振镜的xyz的位置控制和对所述内环激光器13、所述中环激光器14和所述外环激光器15的激光光束的产生和输出功率的占空比进行实时控制。从而在焊接过程可以预加热,减少焊接过程中金属物飞溅。且无需对视觉摄像头进行定位调试,方便使用,可以解决目前焊接系统使用到复杂的图像视觉定位系统需要做定位调试,使用麻烦的问题。
62.在一个实施例中,所述振镜加工头3分别与所述多光束激光控制系统1和所述焊接振镜控制系统2连接,用于接收所述多光束激光控制系统1输出的多光束激光,以及接收所述焊接振镜控制系统2输出的对焊接位置的轨迹规划,实现对焊接工件的焊接。
63.具体地,所述振镜加工头3通过光纤与所述多光束激光控制系统1的所述合束器16连接,通过光纤接收所述合束器16输出的多光束激光。
64.所述振镜加工头3与所述焊接振镜控制系统的所述焊接卡连接,用于接收所述焊接卡输出的对焊接位置的轨迹规划,实现对焊接工件的焊接。
65.进一步地,所述振镜加工头3还包括第二光功率传感器,所述第二光功率传感器安装在振镜位置,用于检测所述振镜加工头3实际出光的加工功率。所述第二光功率传感器与所述多光束激光控制系统1的所述多模主控12的外控接口进行连接,所述第二光功率传感器的检测实际出光的加工功率信号通过模拟量或者通信协议传输给所述多光束激光控制系统1的所述多模主控12的所述第一控制器121,使所述第一控制器121做激光焊接系统加工功率的第四级闭环,形成闭环控制。从而保证出光功率的精度和一致性。
66.在一个实施例中,如图6所示,所述总线型激光焊接系统100还包括加工件外围辅助系统4,所述加工件外围辅助系统4用于辅助所述振镜加工头3完成焊接工件的焊接。
67.具体地,所述加工件外围辅助系统4包括:红光照明、焊接保护气、振镜镜头防飞溅水平保护气、气动电磁阀岛工件固定装置和伺服驱动工件转台;其中:所述红光照明,用于控制光照强度,提升视觉图像的采集质量水平;所述焊接保护气,用于控制防止焊接过程金属氧化飞溅,提升工件焊接的强度和外观平整度;所述振镜镜头防飞溅水平保护气,用于避免金属飞溅颗粒污染振镜镜头;所述气动电磁阀岛工件固定装置,用于控制实现对加工工件的位置固定,防止焊接过程,保护气体压力过大工件脱落;所述伺服驱动工件转台,用于实现无人车间自动化的方式对工件焊接上下料控制。
68.在本实施例中,通过加工件外围辅助系统辅助所述振镜加工头完成焊接工件的焊接,可以在焊接过程减少焊接过程中金属物飞溅,污染环境的问题。
69.在一个实施例中,所述总线型激光焊接系统还包括工控机5,所述工控机5分别与所述多光束激光控制系统1和所述焊接振镜控制系统2电性连接,用于打开所述多光束激光控制系统1的功率波形编辑卡17的波形编辑软件对内环激光器13、中环激光器14和外环激光器15的激光光束的输出功率进行编辑,保存在功率波形编辑卡17内,以及打开所述焊接振镜控制系统2的所述焊接卡222的工艺编辑软件对焊接工件的焊接工艺程序进行编辑,调用视觉摄像头221的自动对焦功能,对焊接工件的位置和焊接前后的图像进行标定。
70.本发明提供一种总线型激光焊接系统,其具体使用过程如下:使用前,首先将所述总线型激光焊接系统通过ethercat总线连接客户的主站系统,例如车间自动化系统。
71.通过所述总线型激光焊接系统的工控机5,打开功率波形编辑卡17的波形编辑软件对内环激光器13、中环激光器14和外环激光器15的激光光束的输出功率进行编辑,最多可以编辑256组波形信息,保存在功率波形编辑卡17内。内环激光器13、中环激光器14和外环激光器15的出光信息和报警状态会实时传输给所述总线卡11,通过所述总线卡11的总线上传给客户的自动化系统。
72.然后,工控机5打开焊接卡222的工艺编辑软件对焊接工件的焊接工艺程序进行编辑,调用视觉摄像头221的自动对焦功能,对焊接工件的位置和焊接前后的图像进行标定。工艺编辑软件编辑好焊接工艺程序后,可以实现对振镜加工头3的振镜的xyz的位置控制和对所述内环激光器13、所述中环激光器14和所述外环激光器15的激光光束的产生和输出功率的占空比进行实时控制,此控制接口也会通过激光控制系统的总线卡11开放给自动化系统,实现自动化系统对内环激光器13、中环激光器14和外环激光器15、焊接卡222、功率波形编辑卡17和视觉摄像头221的实时数据监控。
73.所述振镜加工头3接收所述多光束激光控制系统1输出的合束激光输出功率,以及接收所述焊接振镜控制系统2输出的对焊接位置的轨迹规划,实现对焊接工件的焊接。
74.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而
且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
75.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;在本发明的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本发明的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。