1.本实用新型涉及智能巡检装置领域,特别是涉及应用于粮库的智能巡检机器人。
背景技术:
2.粮食仓库存储期间需进行定期检查,确保粮食的存储质量,目前,采用的检查方式为传统的人工巡检的方式,人工巡检内容包括环境湿度、环境温度、薄膜积水珠、粮食发芽、氮气浓度等粮仓内状态的常规检查,还有仓内粮食取样等等。传统人工巡检,因粮仓内昏暗密闭、空间有限、高度缺氧的环境,作业人员检查作业强度大,危险性高,且需在有限空间、缺氧或毒害环境下进行巡检作业,增加了工作人员的风险性,人工巡检检测质量受限于作业人员的状态核主观性,较容易出现漏检、误检等情况,且检测结果不可追溯,直接影响检测质量,也很难提升巡检结果的准确性。
3.随着高科技的不断发展,目前在很多领域中采用了代替人工的智能巡检机器人,但由于粮仓巡检工作与其他巡检工作内容、环境状态、行驶道路的差异性,现有的智能巡检机器人并不能简单的转化或直接应用于粮仓内的巡检使用,有鉴于此,本案发明人针对粮仓巡检使用需要进行智能巡检机器人的深入研发改进,遂有本案产生。
技术实现要素:
4.本实用新型的目的在于提供一种能够直接行驶在粮库的粮食上进行巡检和取样的一种多功能粮库智能巡检机器人。
5.为实现上述目的,本实用新型的技术方案是:一种多功能粮库智能巡检机器人,其特征在于,包括实现机器人可移动的移动底盘及搭载在移动底盘上的主控板、智能导航避障模块、巡检工作模块、无线传输模块和取样机构,所述移动底盘为履带式移动底盘,所述取样机构设置在履带式移动底盘行驶方向的前端或后端上,所述移动底盘由主控板控制,所述智能导航避障模块用于实现自主的导航避障,同时提供主控板控制移动底盘的移动数据,所述巡检工作模块用于粮库的智能巡检工作,所述取样机构设置有一组或多组,由主控板控制用于粮库内粮食的取样工作,所述主控板上设置无线传输模块供远程传输数据。
6.所述取样机构包括推动动力部件、料斗导向罩和取样勺,所述推动动力部件安装连接在移动底盘上,所述料斗导向罩对应在推动动力部件下方安装连接在移动底盘上,所述取样勺可活动嵌设在料斗导向罩内,所述推动动力部件的下端从料斗导向罩的上端穿入连接在取样勺上,所述料斗导向罩的下端为供取样勺伸出或缩回的开口,所述料斗导向罩与取样勺之间设有活动导向结构,所述推动动力部件的下端与取样勺之间通过可转向活动结构连接,所述活动导向结构为可实现取样勺伸出至缩回这个动作过程为捞取的动作,所述料斗导向罩内朝向取样勺的开口的一侧面为封闭面板。
7.所述可转向活动结构为所述推动动力部件的下端固定连接有铰接头,所述铰接头与取样勺铰接连接,从而实现取样勺相对铰接头可转动;所述活动导向结构为所述取样勺的两相对外侧壁的上端部分别对应凸出有导向柱,两述导向柱分别靠近取样勺两相对外侧
壁的内侧设置,所述料斗导向罩对应两导向柱的两相对外侧壁上分别开设有供对应的导向柱嵌入在内滑动的导向槽,两导向槽分别从料斗导向罩两相对外侧壁上端向下端延伸,并且呈导向槽上端靠近料斗导向罩两相对外侧壁的中间处,向下延伸一段后同时逐渐向靠近料斗导向罩两相对外侧壁的内侧延伸。
8.所述取样勺包括具有盛料腔并且朝向移动底盘的一面为开口的盛料部以及盛料部的相对两侧向上延伸形成对应的侧壁板,所述导向柱分别凸设在两侧壁板的外侧,对应两侧壁板之间的盛料部上端设有供与铰接头铰接的铰接部。
9.所述料斗导向罩的上端固定设有供推动动力部件下端穿设在内起到升降活动导向作用的导向孔。
10.所述推动动力部件为笔形电推杆,所述笔形电推杆的推杆朝下,其上端固定连接在移动底盘的框架上,其推杆下端连接可转向活动结构。
11.所述移动底盘包括底板框架和分别安装设置在底板框架的相对两侧的履带行驶驱动机构,所述履带行驶驱动机构包括安装设置在底板框架内的电机减速器总成、连接在电机减速器总成的输出轴上并且通过轴承组件连接在底板框架上的连接轴、固定套在连接轴上的连接法兰、固定连接在连接法兰上的驱动轮、对应驱动轮通过可调整位置结构安装设置在底板框架上的张紧轮、对应在驱动轮与张紧轮之间并安装设置在底板框架上的导向轮以及绕设在驱动轮与张紧轮上的履带圈,所述履带圈的内侧壁上设有供与导向轮配合的导向结构。
12.所述巡检工作模块包括具有安装在移动底盘上的视觉相机的视觉系统模块和具有安装在移动底盘上的传感器的环境参数检测模块。
13.通过采用上述技术方案,本实用新型的有益效果是:1、具有巡检工作模块、无线传输模块和取样机构能够实现通过机器人巡检和取样工作,代替人工进行工作,避免了人工巡检的隐患,提升了巡检结果的准确性。2、采用履带式移动底盘不管是在平整地面或是直接在粮食堆上都能够行驶,动力大,行驶平稳,有利于巡检工作模块和取样机构的稳定进行,工作更可靠。3、取样机构的结构设置简单易于实现,结构紧凑体积小,可设置多组用于取样多份,取样机构的结构设置能够有效取得样品并妥善存放,自动卸下样品等。综上,通过本实用新型的多功能粮库智能巡检机器人能够在自主巡检时时进行检测和取样,巡检结果具有客观性、一致性及可追溯性,能够自主导航、避障、警示,有效进行巡检工作,从而更好的保证粮库内的粮食安全性。
附图说明
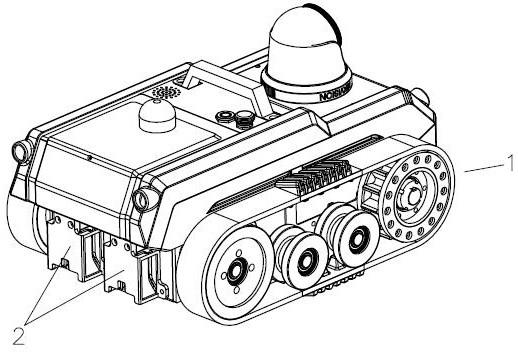
14.图1是本实用新型涉及的一种多功能粮库智能巡检机器人的结构示意图;
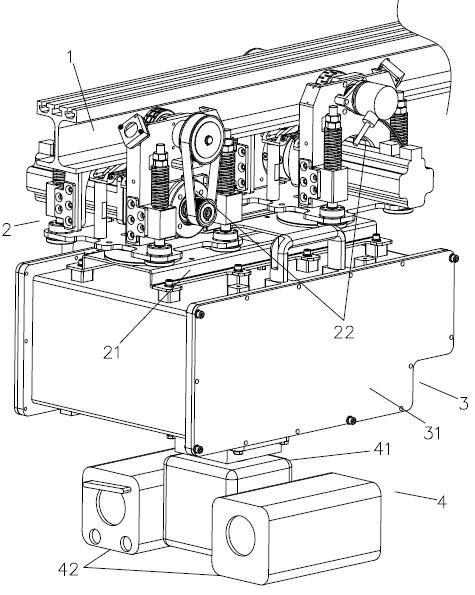
15.图2是本实用新型涉及的一种多功能粮库智能巡检机器人(去掉外壳体)的结构示意图;
16.图3是本实用新型涉及的履带行驶驱动机构的剖视结构示意图;
17.图4是本实用新型涉及的取样机构的结构示意图;
18.图5是本实用新型涉及的取样机构的变化状态结构示意图;
19.图6是本实用新型涉及的取样机构的剖视结构示意图;
20.图7是本实用新型涉及的取样机构的取样勺的结构示意图。
21.图中:
22.移动底盘1;底板框架11;
23.履带行驶驱动机构12;电机减速器总成121;轴承组件122;
24.连接法兰123;驱动轮124;导向轮125;履带圈126;导向结构127;
25.张紧轮128;连接轴129;
26.取样机构2;推动动力部件21;铰接头211;
27.料斗导向罩22;导向孔221;开口222;导向槽223;
28.取样勺23;导向柱231;盛料腔232;盛料部233;侧壁板234;铰接部235。
具体实施方式
29.为了进一步解释本实用新型的技术方案,下面通过具体实施例来对本实用新型进行详细阐述。
30.本实施例公开的一种多功能粮库智能巡检机器人,如图1和图2所示,包括移动底盘1及搭载在移动底盘1上的主控板(附图中未示出)、智能导航避障模块(附图中示出部分部件)、巡检工作模块(附图中未示出)、无线传输模块(附图中未示出)和取样机构2,通过所述移动底盘1实现机器人可移动,由主控板控制,所述智能导航避障模块用于实现机器人的自主的导航避障,同时提供主控板控制移动底盘1的移动数据,所述巡检工作模块用于粮库的智能巡检工作,所述主控板上设置无线传输模块供远程传输数据,所述取样机构2用于粮库内粮食的取样工作,由主控板控制。下面结合附图详细描述本实施例具体的结构设置和位置连接关系。
31.所述移动底盘1,如图1、图2和图3所示,由于本实用新型的巡检机器人是应用于粮库粮仓内的,除了仓库内的环境巡检外,还要靠近粮食或在粮食堆上进行近距离的粮食视觉获取观察和取样,因此其移动底盘1宜为履带式移动底盘,抓地行驶平稳,适应性高。其具体结构设置包括底板框架11和分别安装设置在底板框架11的相对两侧的履带行驶驱动机构12,所述履带行驶驱动机构12包括安装设置在底板框架11内的电机减速器总成121、连接在电机减速器总成121的输出轴上并且通过轴承组件122连接在底板框架11上的连接轴129、固定套在连接轴129上的连接法兰123、固定连接在连接法兰123上的驱动轮124、对应驱动轮124通过可调整位置结构(可为履带机构常见使用的调整结构)安装设置在底板框架11上的张紧轮128、对应在驱动轮124与张紧轮128之间并安装设置在底板框架11上的导向轮125以及绕设在驱动轮124与张紧轮128上的履带圈126,所述履带圈126的内侧壁上设有供与导向轮125配合的导向结构127。在行驶时,通过电机减速器总成121提供驱动力,通过轴承组件122与底板框架11来起到履带行驶驱动机构12的固定支撑,通过连接轴129的将驱动力传输给驱动轮124,在张紧轮128的张紧作用下,驱动轮124的转动带动履带圈126的转动,导向轮125与导向结构127起到防止履带轴向串动的作用,从而实现履带攀附在地向前行驶,不易打滑。电机减速器总成121主要依靠主控板进行控制,可通过canopen通信,下发速度指令给驱动器,驱动器进行电机减速器总成121控制,同时驱动器反馈位置信息给工控机从而可实现机器人的前进、后退、原地转弯等功能,所述主控板上可库仑计获取机器人电池的时时电量状态,以供注意使用充电。所述移动底盘上还可设置有三色灯、音箱、匹配远程终端来起到报警状态,通过无线传输模块(wifi或者5g路由器等的方式)可实现手持终
端、远端服务器与机器人的通信。
32.所述巡检工作模块包括具有安装在移动底盘1上的视觉相机的视觉系统模块和具有安装在移动底盘上的传感器的环境参数检测模块。本实施例中所述视觉相机可采用一个两自由度的云台相机对机器人正前方位拍摄,如此,通过视觉系统模块获取视觉数据以及环境参数检测模块(可包括氧传感器、温湿度传感器等传感器)可时时检测粮库内的环境情况,能够实现通过系统检测数据实现毫米级指标量化,并通过开发面向粮情安全的高效数据管理与挖掘技术,研究粮食表面采集数据与设施/运行安全的关联规则,设计建立粮情安全状态分析模型与基于决策机制的安全风险专家系统,实现粮情的大数据库建立及风险预警。还有仓库内粮食粮情数据采集、处理、分析、预测可执行如下交互:视觉相机通过自主导航在粮库内进行巡检,当视觉相机遇到需要巡检的地方,工控机获取抓拍指令,并将所述抓拍指令发送给粮库智能巡检机器人,粮库智能巡检机器人在接收到所述抓拍指令时,触发视觉相机接收所述抓拍指令,对拍摄到的场景,机器人对抓拍得到的图像进行目标识别或接收机器人发送的抓拍得到的图像进行目标分析并与数据库中的病害模型就行对比,得出相应的风险等级反馈到手持终端或者远端服务器,并进行相对应的数据存储,系统可进行报警并记录当前位置来反馈给工作人员。若该检测点不存在风险,则机器人在导航的作用下继续移动至下一病害检测点。过程中,工作人员还可通过手持终端控制机器人的运行及获取视觉相机的数据,机器人还可以通过wifi将视觉相机采集到的数据传输到远程端。
33.所述智能导航避障模块的设置可参照现有的一些智能移动设备的对应模块,如通过超声波避障雷达、急停按钮等实现避障,通过二维码导航或者激光雷达等实现机器人在粮库内进行自主行走,通过无线传输模块的传输智能导航避障所需或所获得的数据,具体设置这里不详细描述具体限定,不影响对本案技术方案的清楚理解。
34.所述取样机构2,设置在履带式移动底盘行驶方向的前端或后端上,所述取样机构2可设置有一组或多组,图中为设置在同一端的两组,具体根据实际巡检取样需要来设置,由主控板控制用于粮库内粮食的取样工作。本实施例的具体结构设置如图4、图5、图6和图7所示,包括推动动力部件21、料斗导向罩22和取样勺23。
35.所述推动动力部件21本实施例采用的是笔形电推杆,所述笔形电推杆的推杆朝下,其上端固定连接在移动底盘1的框架上,所述料斗导向罩22对应在笔形电推杆下方安装连接在移动底盘1的框架上,所述取样勺23可活动嵌设在料斗导向罩22内,所述笔形电推杆的推杆下端从料斗导向罩22的上端穿入连接在取样勺23上,并且之间通过可转向活动结构连接,具体是所述笔形电推杆的推杆的下端固定连接有铰接头211,所述铰接头211与取样勺23铰接连接,从而可实现取样勺23相对铰接头可转动,这里为达到笔形电推杆的推杆的伸缩稳定,所述料斗导向罩22的上端固定设有供笔形电推杆的推杆下端穿设在内起到升降活动导向作用的导向孔221。
36.所述料斗导向罩22的下端为供取样勺23伸出或缩回的开口222,为达到较好的取样工作效果,所述料斗导向罩22与取样勺23之间设有活动导向结构,从而实现取样勺23伸出至缩回这个动作过程为捞取的动作,从而能够将粮食颗粒盛入取样勺23内,这里为避免粮食颗粒盛入取样勺23后,取样勺23缩回后粮食颗粒掉落,所述料斗导向罩22内朝向取样勺23的开口的一侧面为封闭面板(图中为移动底盘1的框架面板),通过该面板可罩住取样勺23的开口,从而避免粮食掉落。本实施例中所述活动导向结构为所述取样勺23的两相对
外侧壁的上端部分别对应凸出有导向柱231,两述导向柱231分别靠近取样勺23两相对外侧壁的内侧(靠近移动底盘1的框架面板)设置,所述料斗导向罩22对应两导向柱231的两相对外侧壁上分别开设有供对应的导向柱231嵌入在内滑动的导向槽223,两导向槽223分别从料斗导向罩22两相对外侧壁上端向下端延伸,并且呈导向槽223上端靠近料斗导向罩22两相对外侧壁的中间处,向下延伸一段后同时逐渐向靠近料斗导向罩22两相对外侧壁的内侧延伸,如图4和图5所示的导向槽223为竖撇状。所述取样勺23如图7所示,包括具有盛料腔232并且朝向移动底盘1的一面为开口的盛料部233以及盛料部233的相对两侧向上延伸形成对应的侧壁板234,所述导向柱231分别凸设在两侧壁板234的外侧,对应两侧壁板234之间的盛料部233上端设有供与铰接头211铰接的铰接部235。
37.所述取样机构2通过上述结构设置,发送取样命令,主控板控制笔形电推杆的推杆向下伸出时下推出取样勺23,在导向柱231与导向槽223以及取样勺23相对铰接头可转动的配合作用下,下推出的取样勺23同时向外扩张开一定角度,也能够使得取样勺23的开口朝向粮食颗粒,如图5所示,在笔形电推杆的推杆上升时反之带动取样勺23缩回复位,在缩回复位过程中取样勺23的开口能够捞取粮食颗粒进入取样勺23内,从而完成取样工作,缩回料斗导向罩22内。
38.上述实施例和图式并非限定本实用新型的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本实用新型的专利范畴。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。