1.本发明涉及机械手领域,更具体地说,涉及一种多工位配套夹持机械手的移动选择方法。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机床各自的优点。机械手是最早出现的工业机床人,也是最早出现的现代机床人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,由于加工中心的工件重量以及行程范围要求较大,并且机械手成本过高,往往是多个机床同时共用一个机械手,使得多个工位的选择、行走以及承载力的范围不便于进行调配。
技术实现要素:
3.针对现有技术中存在的问题,本发明的目的在于提供一种多工位配套夹持机械手的移动选择方法,它可以通过在地面设计固定间距的铁轨,然后机械手在接收调度指令后利用固定的轨迹进行指定地点的运动,并且固定了与安装在机床上的衔接头之间连接点位置轴线距离,然后机械手和衔接头连接位置的轴线重合,再通过升降改变纵向的位置距离,利用匹配连接位置大小的方式进行极小误差的连接,从而适应了不同的机床,然后通过现有技术的计算机程序进行产品位置信息的数据传输,然后机械臂的肘关节与前臂进行长度的变化,以此适应不同大小产品。
4.为解决上述问题,本发明采用如下的技术方案。
5.一种多工位配套夹持机械手的移动选择方法,包括以下步骤:第一步,将衔接头安装在机床上,当需要移动产品时,中央控制器发出调度指令,机械手接收到指令后,固定轨迹移动模块开始启动,带动机械手在固定的轨迹上进行移动行走;第二步,固定轨迹移动模块的带动的过程中,当机械手在接触到衔接头后,选择连接单元发出信号,控制器接收到信号发出固定轨迹移动模块停止移动的信号,选择连接单元开始与衔接头连接;第三步,连接完毕后,从机床接收产品的位置信息,然后启动伸缩结构进行机械手工作力臂以及机械手工作空间的复位调整,复位完成后开始对产品进行搬运;第四步,在搬运产品时反馈机构被产品的自身重力触发,发出信号被控制器接受,发出功率调度信号;第五步,当完成对产品的搬运后,机械手向中央控制器发出信号,然后中央控制器发出控制指令,使得选择连接单元脱离衔接头,然后机械手在固定轨迹移动模块上向初始地点行走复位。
6.进一步的,一种多工位配套夹持机械手包括机体和机械臂;所述选择连接单元包括升降装置、连接模块和平台;所述固定轨迹移动模块包括安装在地面上的一对铁轨,机械臂、平台、升降装置、机体和一对铁轨由上至下排布连接模块安装在平台侧面,位于机体的行走方向一面;所述机械臂安装在平台的上侧,机械臂中的肘关节和前臂内均安装有伸缩结构,通过在地面设计固定间距的铁轨,然后机械手在接收调度指令后利用固定的轨迹进行指定地点的运动,并且固定了与安装在机床上的衔接头之间连接点位置轴线距离,然后机械手和衔接头连接位置的轴线重合,再通过升降改变纵向的位置距离,利用匹配连接位置大小的方式进行极小误差的连接,从而适应了不同的机床。
7.进一步的,所述固定轨迹移动模块还包括一对驱动轮、多个二维码贴片、一对辅助稳定机构和扫描标记机构;多个所述二维码贴片贴在地面上并且位于一对铁轨之间,一对驱动轮安装在机体两侧并且分别抵在一对铁轨上,扫描标记机构设在机体底部中侧,位于二维码贴片正上方,一对辅助稳定机构均安装在机体底部,位于扫描标记机构两侧,通过固定移动轨迹,使得机械手移动起来方便减少误差,通过二维码贴片进行扫描,使得定位准确。
8.进一步的,所述辅助稳定机构包括支撑板和电缸;所述电缸固定安装在机体内,电缸向下延伸出机体与支撑板固定连接,通过伸出支撑板进行增大接触面接,使得机械手更加稳定工作和连接。
9.进一步的,所述扫描标记机构包括摄像头、记号笔、伸缩槽和油缸;所述伸缩槽开设在机体内,油缸固定安装在伸缩槽顶壁,摄像头固定安装在油缸下侧,记号笔固定安装在摄像头下侧,通过对扫描不清楚的二维码贴片进行标记,使得更换方便。
10.进一步的,所述升降装置包括铰接杆组、螺纹轴、电机和开口槽;所述开口槽开设在机体内,铰接杆组一端滑动安装在开口槽下壁,另一端滑动安装在平台下侧,螺纹轴转动安装在开口槽侧壁之间,螺纹轴和铰接杆组螺纹配合,电机固定安装在机体外侧,电机的电机轴和螺纹轴固定连接,通过利用铰接杆组进行升降,配合螺纹轴,使得高度方向得到稳定的支撑,方便机械臂运动。
11.进一步的,所述连接模块包括连接头、一对电子滑轨、连接槽、公插、触发杆、滑动槽、弹簧和触发传感器;所述滑动槽开设在平台内,触发传感器固定安装在滑动槽的后壁上,弹簧一端固定在滑动槽的后壁上,另一端固定在触发杆上,触发杆和滑动槽侧壁滑动配合,触发杆中部凸出伸入弹簧内,触发传感器位于弹簧内,触发杆前端与连接头固定连接,连接槽开设在连接头内,一对电子滑轨分别固定安装在连接槽的上下壁上,公插安装在一对电子滑轨之间并且与一对电子滑轨均固定连接;所述衔接头包括衔接槽、母插和衔接头本体;衔接头本体安装在机床上并位于一对铁轨之间,衔接槽开设在衔接头本体内,衔接槽大小和连接头一致,母插安装在衔接槽内壁上,通过利用弹簧进行自动位置校准,使得连接误差减少,配合固定轨迹,使得横向方向得到补偿,从而连接更加方便,适应不同机床。
12.进一步的,所述伸缩结构包括保护壳、伸缩电缸和滑动凹槽;所述保护壳固定安装在肘关节其中一半部或者前臂其中一半部上,保护壳与肘关节另一半部或者前臂另一半部滑动配合,伸缩电缸安装在保护壳内,一端与肘关节另一半部或者前臂另一半部固定连接,另一端与保护壳固定连接,滑动凹槽开设在保护壳侧面并内部设有电磁铁,通过设计肘关节和前臂的伸长,来配合不同机床的工作范围。
13.进一步的,所述机械臂内还设有辅助支撑机构,辅助支撑机构包括电动升缩杆、吸附块、轨迹槽、移动轨迹槽和衔接块;所述轨迹槽开设在肘关节侧面,吸附块滑动安转在轨迹槽内,轨迹槽内设有电磁铁,吸附块延伸出肘关节外部与电动升缩杆一端铰接,移动轨迹槽开设在前臂靠近肘关节的一面,移动轨迹槽内设有电磁铁,衔接块滑动安转在移动轨迹槽内,衔接块延伸出前臂外部与电动升缩杆另一端铰接;所述轨迹槽和滑动凹槽连通,通过机械臂在移动产品时利用电动升缩杆进行支撑,形成稳定三角形,使得机械臂更加稳固,防止损坏。
14.进一步的,所述反馈机构包括磁吸头、移动腔、机械臂夹具本体、一对压缩弹簧和一对压力传感器;所述移动腔开设在机械臂夹具本体内,磁吸头滑动安装在移动腔内并延伸出夹具本体外部,一对压力传感器分别固定安装在移动腔的底壁,一对压缩弹簧分别固定安装一对压力传感器上,一对压缩弹簧的另一端均与磁吸头固定连接,通过利用压力传感器来检测带移动产品的重量,然后进行功率的调配,减少损耗。
15.相比于现有技术,本发明的优点在于:(1)本方案通过在地面设计固定间距的铁轨,然后机械手在接收调度指令后利用固定的轨迹进行指定地点的运动,并且固定了与安装在机床上的衔接头之间连接点位置轴线距离,然后机械手和衔接头连接位置的轴线重合,再通过升降改变纵向的位置距离,利用匹配连接位置大小的方式进行极小误差的连接,从而适应了不同的机床,然后通过现有技术的计算机程序进行产品位置信息的数据传输,然后机械臂的肘关节与前臂进行长度的变化,以此适应不同大小产品。
16.(2)本方案通过记号笔配合摄像头进行标记,使得摄像头扫描二维码贴片出现不可以扫描或者扫描不迅速的情况后进行标记,方便更换,提高行动的准确率。
17.(3)本方案通过利用移动产品时,产品的自重对压力传感器产生压力,从而压力传感器发出信号给控制器,然后控制器进行功率的调配,减少能源损耗。
18.(4)本方案通过机械臂在移动产品时利用电动升缩杆进行支撑,形成稳定三角形,使得机械臂更加稳固,防止损坏。
附图说明
19.图1为本发明的结构示意图;图2为本发明图1中扫描标记机构处的结构示意图图3为本发明图1中沿a-a处的剖面示意图;图4为本发明图1中机械臂处的结构示意图;图5为本发明图4中辅助支撑机构拉伸的结构示意图;图6为本发明图4中反馈机构处的结构示意图。
20.图中标号说明:机体1、选择连接单元2、平台23、固定轨迹移动模块11、铁轨111、驱动轮112、二维码贴片113、辅助稳定机构12、支撑板121、电缸122、扫描标记机构5、摄像头51、记号笔52、伸缩槽53、油缸54、升降装置6、连接模块3、连接头31、电子滑轨32、连接槽33、公插34、触发杆35、滑动槽36、弹簧37、触发传感器38、平台23、升降装置6、铰接杆组21、螺纹轴22、电机24、开口槽25、辅助支撑机构41、电动升缩杆411、吸附块412、轨迹槽413、移动轨迹槽414、衔接
块415、反馈机构43、磁吸头431、移动腔432、机械臂夹具本体433、压缩弹簧434、压力传感器435、机械臂4、伸缩结构42、保护壳421、伸缩电缸422、滑动凹槽423、衔接头39、衔接槽391、母插392、衔接头本体393。
具体实施方式
21.请参阅图1-6的一种多工位配套夹持机械手的移动选择方法,它包括以下步骤:第一步,将衔接头39安装在机床上,当需要移动产品时,中央控制器发出调度指令,机械手接收到指令后,固定轨迹移动模块11开始启动,带动机械手在固定的轨迹上进行移动行走;第二步,固定轨迹移动模块11的带动的过程中,当机械手在接触到衔接头39后,选择连接单元2发出信号,控制器接收到信号发出固定轨迹移动模块11停止移动的信号,选择连接单元2开始与衔接头39连接;第三步,连接完毕后,从机床接收产品的位置信息,然后启动伸缩结构42进行机械手工作力臂以及机械手工作空间的复位调整,复位完成后开始对产品进行搬运;第四步,在搬运产品时反馈机构43被产品的自身重力触发,发出信号被控制器接受,发出功率调度信号;第五步,当完成对产品的搬运后,机械手向中央控制器发出信号,然后中央控制器发出控制指令,使得选择连接单元2脱离衔接头39,然后机械手在固定轨迹移动模块11上向初始地点行走复位;通过在地面设计固定间距的铁轨,然后机械手在接收调度指令后利用固定的轨迹进行指定地点的运动,并且固定了与安装在机床上的衔接头之间连接点位置轴线距离,然后机械手和衔接头连接位置的轴线重合,再通过升降改变纵向的位置距离,利用匹配连接位置大小的方式进行极小误差的连接,从而适应了不同的机床,然后通过现有技术的计算机程序进行产品位置信息的数据传输,然后机械臂的肘关节与前臂进行长度的变化,以此适应不同大小产品。
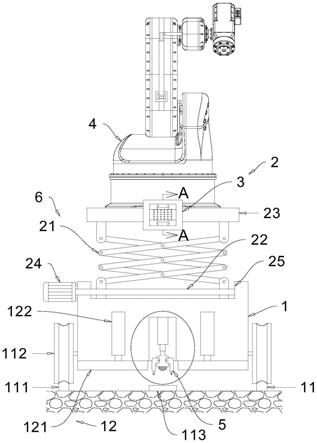
22.如图2-6所示,一种多工位配套夹持机械手包括机体1和机械臂4;选择连接单元2包括升降装置6、连接模块3和平台23;固定轨迹移动模块11包括安装在地面上的一对铁轨111,机械臂4、平台23、升降装置6、机体1和一对铁轨111由上至下排布连接模块3安装在平台23侧面,位于机体1的行走方向一面;机械臂4安装在平台23的上侧,机械臂4中的肘关节和前臂内均安装有伸缩结构42,通过在地面设计固定间距的铁轨,然后机械手在接收调度指令后利用固定的轨迹进行指定地点的运动,并且固定了与安装在机床上的衔接头之间连接点位置轴线距离,然后机械手和衔接头连接位置的轴线重合,再通过升降改变纵向的位置距离,利用匹配连接位置大小的方式进行极小误差的连接,从而适应了不同的机床。
23.如图1-2所示,固定轨迹移动模块11还包括一对驱动轮112、多个二维码贴片113、一对辅助稳定机构12和扫描标记机构5;多个二维码贴片113贴在地面上并且位于一对铁轨111之间,一对驱动轮112安装在机体1两侧并且分别抵在一对铁轨111上,扫描标记机构5设在机体1底部中侧,位于二维码贴片113正上方,一对辅助稳定机构12均安装在机体1底部,位于扫描标记机构5两侧,通过固定移动轨迹,使得机械手移动起来方便减少误差,通过二维码贴片进行扫描,使得定位准确。辅助稳定机构12包括支撑板121和电缸122;电缸122固
定安装在机体1内,电缸122向下延伸出机体1与支撑板121固定连接,通过伸出支撑板进行增大接触面接,使得机械手更加稳定工作和连接。扫描标记机构5包括摄像头51、记号笔52、伸缩槽53和油缸54;伸缩槽53开设在机体1内,油缸54固定安装在伸缩槽53顶壁,摄像头51固定安装在油缸54下侧,记号笔52固定安装在摄像头51下侧,通过对扫描不清楚的二维码贴片113进行标记,使得更换方便。
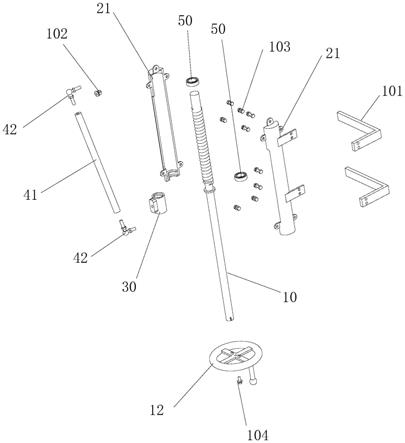
24.如图3-4所示,升降装置6包括铰接杆组21、螺纹轴22、电机24和开口槽25;开口槽25开设在机体1内,铰接杆组21一端滑动安装在开口槽25下壁,另一端滑动安装在平台23下侧,螺纹轴22转动安装在开口槽25侧壁之间,螺纹轴22和铰接杆组21螺纹配合,电机24固定安装在机体1外侧,电机24的电机轴和螺纹轴22固定连接,通过利用铰接杆组21进行升降,配合螺纹轴22,使得高度方向得到稳定的支撑,方便机械臂运动。
25.如图2-3所示,连接模块3包括连接头31、一对电子滑轨32、连接槽33、公插34、触发杆35、滑动槽36、弹簧37和触发传感器38;滑动槽36开设在平台23内,触发传感器38固定安装在滑动槽36的后壁上,弹簧37一端固定在滑动槽36的后壁上,另一端固定在触发杆35上,触发杆35和滑动槽36侧壁滑动配合,触发杆35中部凸出伸入弹簧37内,触发传感器38位于弹簧37内,触发杆35前端与连接头31固定连接,连接槽33开设在连接头31内,一对电子滑轨32分别固定安装在连接槽33的上下壁上,公插34安装在一对电子滑轨32之间并且与一对电子滑轨32均固定连接;衔接头39包括衔接槽391、母插392和衔接头本体393;衔接头本体393安装在机床上并位于一对铁轨11之间,衔接槽391开设在衔接头本体393内,衔接槽391大小和连接头31一致,母插392安装在衔接槽391内壁上,通过利用弹簧37进行自动位置校准,使得连接误差减少,配合固定轨迹,使得横向方向得到补偿,从而连接更加方便,适应不同机床。伸缩结构42包括保护壳421、伸缩电缸422和滑动凹槽423;保护壳421固定安装在肘关节其中一半部或者前臂其中一半部上,保护壳421与肘关节另一半部或者前臂另一半部滑动配合,伸缩电缸422安装在保护壳421内,一端与肘关节另一半部或者前臂另一半部固定连接,另一端与保护壳421固定连接,滑动凹槽423开设在保护壳421侧面并内部设有电磁铁,通过设计肘关节和前臂的伸长,来配合不同机床的工作范围。
26.如图3-6所示,机械臂4内还设有辅助支撑机构41,辅助支撑机构41包括电动升缩杆411、吸附块412、轨迹槽413、移动轨迹槽414和衔接块415;轨迹槽413开设在肘关节侧面,吸附块412滑动安转在轨迹槽413内,轨迹槽413内设有电磁铁,吸附块412延伸出肘关节外部与电动升缩杆411一端铰接,移动轨迹槽414开设在前臂靠近肘关节的一面,移动轨迹槽414内设有电磁铁,衔接块415滑动安转在移动轨迹槽414内,衔接块415延伸出前臂外部与电动升缩杆411另一端铰接;轨迹槽413和滑动凹槽423连通,通过机械臂4在移动产品时利用电动升缩杆411进行支撑,形成稳定三角形,使得机械臂4更加稳固,防止损坏。反馈机构43包括磁吸头431、移动腔432、机械臂夹具本体433、一对压缩弹簧434和一对压力传感器435;移动腔432开设在机械臂夹具本体433内,磁吸头431滑动安装在移动腔432内并延伸出夹具本体433外部,一对压力传感器435分别固定安装在移动腔432的底壁,一对压缩弹簧434分别固定安装一对压力传感器435上,一对压缩弹簧434的另一端均与磁吸头431固定连接,通过利用压力传感器435来检测带移动产品的重量,然后进行功率的调配,减少损耗。
27.当中央控制器发出调度指令后,如图1和6所示,启动驱动轮112,然后机体1开始在铁轨111上行走,同时启动摄像头51进行二维码贴片113的扫描,当某一个二维码贴片113出
现扫描不上的情况,启动油缸54,使得摄像头51带动记号笔52伸出,然后随着机体1的行走在二维码贴片113上留下标记,方便更换。
28.如图1-2所示,当走到指定位置后,驱动轮112会继续运转,使得连接头31抵在待连接的机床的衔接头本体393上,然后反作用力使得连接头31推动触发杆35压缩弹簧37,当触发杆35触发触发传感器38后发出信号,控制器接收到信号发出驱动轮112停止移动的信号,然后再发出电机24启动信号,螺纹轴22开始转动,从而铰接杆组21开始移动,带动平台23上升,在平台23移动过程中触发传感器38始终被触发,从而连接头31开始移动(连接头31的初始位置比所有机床的衔接槽391位置低),当连接头31上移过程中被弹簧37的反作用力推入衔接槽391后,触发传感器38不再被触发信号中断,控制器发出电机24停止信号,并发出电缸122启动信号,使得一对支撑板121接触地面增大接触面积,从而更加稳定,然后发出电子滑轨32启动信号,使得公插34配合母插392,连接完成。
29.如图3-4所示,当连接完成后,适配机床工作空间,启动伸缩电缸422,然后肘关节或者前臂分离成两部分,保护壳421拉伸露出,在展开肘关节或者前臂时,轨迹槽413和滑动凹槽423内的电磁铁均通电,然后电动升缩杆411启动配合拉伸,当机械臂4移动时通过分别控制轨迹槽413和滑动凹槽423内的电磁铁通电与断电,使得电动升缩杆411配合移动和支撑。
30.如图5所示,当移动不同产品时,磁吸头431需要将吸附的功率调节到一定峰值,方便吸附产品,当磁吸头431吸附产品后,磁吸头431受产品重力作用压缩压缩弹簧434,从而压力传感器435传递信号,控制器根据压力传感器435的压力数据进行调控不同功率的输出,配合产品移动。
31.如图1所示,当完成对产品的搬运后,机械手向中央控制器发出信号,然后中央控制器发出控制指令,使得连接头31脱离衔接头39,然后机械手在固定轨迹移动模块11上通过驱动轮112向初始地点行走复位。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。