1.本实用新型涉及巡检机器技术领域,更具体地说,本实用新型涉及一种智能养猪巡检机器人。
背景技术:
2.巡检机器人是以移动机器人作为载体,以可见光摄像机作为载荷系统,进行巡检作业,养猪的环境差,对于工作人员巡检极不友好,而智能巡检机器人能够替代工作人员,对猪进行巡检,其中,轨道式的巡检机器人不与地面接触,更加适合养猪场。
3.现有技术中,巡检机器人重心偏移,会增大巡检机器人与轨道之间的摩擦力,不仅影响巡检机器人移动,也会导致加快轨道的磨损。
技术实现要素:
4.1、本实用新型要解决的技术问题
5.本实用新型的实施例提供一种智能养猪巡检机器人,以解决上述背景技术中提出的问题:
6.巡检机器人重心偏移,会增大巡检机器人与轨道之间的摩擦力,不仅影响巡检机器人移动,也会导致加快轨道的磨损的问题。
7.2、技术方案
8.为实现上述目的,本实用新型提供如下技术方案:
9.一种智能养猪巡检机器人,包括壳体,所述壳体的顶部滑动连接有轨道,所述壳体的内部固定安装有蓄电池,所述壳体的底部固定安装有摄像头,所述壳体的顶部侧面转动连接有竖直滑轮,所述壳体的内部固定安装有内仓,所述内仓的正面设置有偏转组件,所述偏转组件的左右两侧设置有减压组件。
10.优选的,所述偏转组件包括重力块,所述重力块的顶部固定安装有连杆,所述连杆的另一端固定安装有转轴,所述转轴的表面且位于连杆的背面固定安装有缺齿,所述缺齿的底部啮合连接有齿轮,所述齿轮的背面固定安装有螺杆,所述螺杆的表面螺纹连接有螺套,所述螺套的左右两侧均固定安装有连接块,所述连接块的内部穿设有导杆。
11.优选的,所述减压组件包括第一斜块,所述第一斜块的斜面抵接有第二斜块,所述第二斜块的顶部固定安装有连接架,所述连接架的表面固定安装有压板,所述压板的侧面固定安装有弹簧伸缩杆,所述弹簧伸缩杆的另一端与内仓固定连接,所述连接架的顶部固定安装有凹字块,所述凹字块的凹处转动连接有水平滑轮。
12.优选的,所述内仓的内壁与蓄电池固定连接,所述内仓的内部设有电机,所述蓄电池与电机电性连接,所述电机与竖直滑轮固定连接,所述偏转组件与减压组件均设置在壳体与内仓之间的夹缝处。
13.优选的,所述转轴的末端与内仓转动连接,所述螺杆远离齿轮的一端与壳体转动连接,所述导杆的末端与壳体固定连接。
14.优选的,所述第一斜块的侧面与连接块固定连接,所述水平滑轮的表面与轨道滚动连接。
15.3、有益效果
16.(1)本实用新型中设置有偏转组件,巡检机器人重心偏移时,重力块始终使得连杆与水平面垂直,故重力块相对于内仓产生转动,以至于缺齿偏转,其偏转方向即为巡检机器人重心偏移方向,从而实现利用重心偏移产生相对移动判断重心偏转方向的效果。
17.(2)本实用新型中设置有减压组件,利用偏转组件判断巡检机器人重心偏移方向,随后对应位置的第一斜块与第二斜块相互挤压,第二斜块带动连接架移动,随后连接架带动凹字块移动,凹字块内部的水平滑轮与轨道接触,减小巡检机器人重心偏移后与轨道之间的摩擦,同时在巡检机器人过弯时也能减小向心力引起的摩擦力,从而实现在重心偏移时减小摩擦力避免断裂无法正常工作的效果。
附图说明
18.图1为本实用新型的轨道结构示意图。
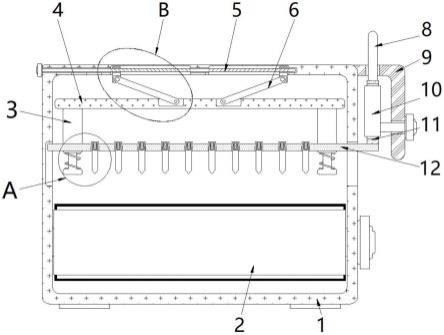
19.图2为本实用新型的壳体结构剖视示意图。
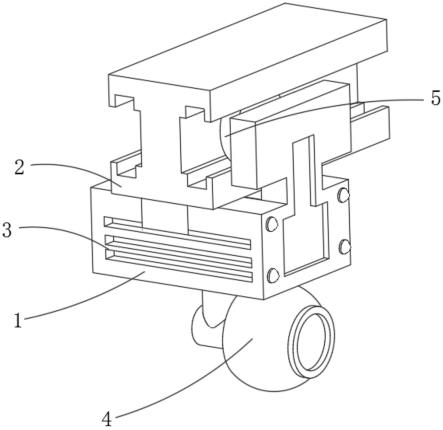
20.图3为本实用新型的螺杆结构示意图。
21.图中标号说明:
22.1、壳体;2、轨道;3、蓄电池;4、摄像头;5、竖直滑轮;6、内仓;7、偏转组件;701、重力块;702、连杆;703、转轴;704、缺齿;705、齿轮;706、螺杆;707、螺套;708、连接块;709、导杆;8、减压组件;801、第一斜块;802、第二斜块;803、连接架;804、压板;805、弹簧伸缩杆;806、凹字块;807、水平滑轮。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.实施例1:
25.请参阅图1-3,一种智能养猪巡检机器人,包括壳体1,壳体1的顶部滑动连接有轨道2,壳体1的内部固定安装有蓄电池3,壳体1的底部固定安装有摄像头4,壳体1的顶部侧面转动连接有竖直滑轮5,壳体1的内部固定安装有内仓6,内仓6的正面设置有偏转组件7。
26.偏转组件7包括重力块701,重力块701的顶部固定安装有连杆702,连杆702的另一端固定安装有转轴703,转轴703的末端与内仓6转动连接,转轴703的表面且位于连杆702的背面固定安装有缺齿704,缺齿704的底部啮合连接有齿轮705,齿轮705的背面固定安装有螺杆706,螺杆706远离齿轮705的一端与壳体1转动连接,螺杆706的表面螺纹连接有螺套707,螺套707的左右两侧均固定安装有连接块708,连接块708的内部穿设有导杆709,导杆709的末端与壳体1固定连接。
27.偏转组件7的左右两侧设置有减压组件8,内仓6的内壁与蓄电池3固定连接,内仓6的内部设有电机,蓄电池3为摄像头4和电机供电,摄像头4拍出的猪的图像,蓄电池3与电机
电性连接,电机与竖直滑轮5固定连接,偏转组件7与减压组件8均设置在壳体1与内仓6之间的夹缝处。
28.本实用新型中设置有偏转组件7,巡检机器人重心偏移时,此时巡检机器人与轨道2之间的摩擦力大,不仅会导致巡检机器人振动,摄像头4所拍出的图像晃动,且长时间摩擦会导致轨道2磨损,为防止上述现象,利用重力块701作为配重,即使巡检机器人在重心偏移时,重力块701也始终使得连杆702与水平面垂直,故重力块701相对于内仓6产生转动,而转动点为转轴703,转轴703再带动缺齿704转动,缺齿704偏转带动齿轮705转动,缺齿704偏转方向即为巡检机器人重心偏移方向,齿轮705带动螺杆706旋转,螺杆706改变螺套707的位置,连接块708和导杆709防止螺套707旋转,采用上述结构,利用重心偏移产生相对移动,判断重心偏转方向,从而实现监控巡检机器人偏转方向的效果。
29.实施例2:
30.请参阅图2-3,结合实施例1的基础有所不同之处在于,减压组件8包括第一斜块801,第一斜块801的侧面与连接块708固定连接,第一斜块801的斜面抵接有第二斜块802,第二斜块802的顶部固定安装有连接架803,连接架803的表面固定安装有压板804,压板804的侧面固定安装有弹簧伸缩杆805,弹簧伸缩杆805的另一端与内仓6固定连接,连接架803的顶部固定安装有凹字块806,凹字块806的凹处转动连接有水平滑轮807,水平滑轮807的表面与轨道2滚动连接。
31.本实用新型中设置有减压组件8,利用偏转组件7判断巡检机器人重心偏移方向,此时螺套707利用连接块708带动第一斜块801移动,重力块701向左偏移时,则齿轮705逆时针旋转,位于螺套707向远离齿轮705的方向移动,则对应位置的第一斜块801与第二斜块802相互挤压,第二斜块802向内仓6的方向移动,连接架803带动压板804移动,压板804压缩弹簧伸缩杆805,弹簧伸缩杆805起到复位和导向的作用,随后连接架803带动凹字块806移动,凹字块806内部的水平滑轮807与轨道2接触,减小巡检机器人重心偏移后与轨道2之间的摩擦,同时在巡检机器人过弯时也能减小向心力引起的摩擦力,避免巡检机器人与轨道2之间的摩擦力过大,且巡检机器人多次摩擦导致轨道2磨损断裂,从而实现在重心偏移时减小摩擦力避免断裂无法正常工作的效果。
32.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。