变焦镜头、相机模组和电子装置
1.本技术为中国申请日2019年12月31日,申请号201911417951.8,名称为“变焦镜头、相机模组和电子装置”的分案申请。
技术领域
2.本技术涉及消费性电子技术领域,尤其是涉及一种变焦镜头、相机模组和电子装置。
背景技术:
3.在相关技术中,变焦镜头可通过透镜组的移动实现整体焦距的变化,然而目前的驱动芯片大多只适用于实现定焦镜头的对焦以及光学防抖,由于对焦时透镜组移动行程范围较小,实现光学防抖时变焦镜头整体的移动行程范围也较小,驱动芯片有效控制位即使较小也能够高精度控制透镜组的移动。然而,在变焦镜头中,变焦过程中透镜组的移动行程范围较大,且变焦后进行对焦时的精度要求较高,在驱动芯片的有效控制位较少的情况下,很难实现变焦的同时保证变焦镜头对焦的移动精度。
技术实现要素:
4.本技术的实施方式提供一种变焦镜头、相机模组和电子装置。
5.本技术实施方式的变焦镜头包括包括壳体、第一透镜组件、第二透镜组件、第三透镜组件、第一驱动芯片和第二驱动芯片。所述第一透镜组件、所述第二透镜组件和所述第三透镜组件设置在壳体内。所述第一透镜组件、所述第二透镜组件和所述第三透镜组件沿所述第一透镜组件的光轴依次设置。所述第一驱动芯片包括第一控制端、第二控制端、第三控制端和第四控制端,所述第一控制端和所述第二控制端分别用于控制所述第二透镜组件和所述第三透镜组件沿所述光轴相对所述第一透镜组件移动,以实现所述变焦镜头的变焦。所述第三控制端用于在第一目标焦距下,控制所述第三透镜组件沿所述光轴相对所述第一透镜组件移动以实现所述变焦镜头的对焦;所述第四控制端用于在第二目标焦距下,控制所述第三透镜组件沿所述光轴相对所述第一透镜组件移动以实现所述变焦镜头的对焦,所述第一目标焦距和所述第二目标焦距不相同。
6.本技术实施方式的相机模组包括感光元件和变焦镜头。所述感光元件设置在所述变焦镜头的像侧。所述变焦镜头包括包括壳体、第一透镜组件、第二透镜组件、第三透镜组件、第一驱动芯片和第二驱动芯片。所述第一透镜组件、所述第二透镜组件和所述第三透镜组件设置在壳体内。所述第一透镜组件、所述第二透镜组件和所述第三透镜组件沿所述第一透镜组件的光轴依次设置。所述第一驱动芯片包括第一控制端、第二控制端、第三控制端和第四控制端,所述第一控制端和所述第二控制端分别用于控制所述第二透镜组件和所述第三透镜组件沿所述光轴相对所述第一透镜组件移动,以实现所述变焦镜头的变焦。所述第三控制端用于在第一目标焦距下,控制所述第三透镜组件沿所述光轴相对所述第一透镜组件移动以实现所述变焦镜头的对焦;所述第四控制端用于在第二目标焦距下,控制所述
第三透镜组件沿所述光轴相对所述第一透镜组件移动以实现所述变焦镜头的对焦,所述第一目标焦距和所述第二目标焦距不相同。
7.本技术的电子装置包括机壳和上述实施方式的相机模组。所述相机模组安装在所述机壳上。所述相机模组包括感光元件和变焦镜头。所述感光元件设置在所述变焦镜头的像侧。所述变焦镜头包括包括壳体、第一透镜组件、第二透镜组件、第三透镜组件、第一驱动芯片和第二驱动芯片。所述第一透镜组件、所述第二透镜组件和所述第三透镜组件设置在壳体内。所述第一透镜组件、所述第二透镜组件和所述第三透镜组件沿所述第一透镜组件的光轴依次设置。所述第一驱动芯片包括第一控制端、第二控制端、第三控制端和第四控制端,所述第一控制端和所述第二控制端分别用于控制所述第二透镜组件和所述第三透镜组件沿所述光轴相对所述第一透镜组件移动,以实现所述变焦镜头的变焦。所述第三控制端用于在第一目标焦距下,控制所述第三透镜组件沿所述光轴相对所述第一透镜组件移动以实现所述变焦镜头的对焦;所述第四控制端用于在第二目标焦距下,控制所述第三透镜组件沿所述光轴相对所述第一透镜组件移动以实现所述变焦镜头的对焦,所述第一目标焦距和所述第二目标焦距不相同。
8.本技术实施方式的变焦镜头、相机模组和电子装置中,第一驱动芯片通过第一控制端和第二控制端分别控制第二透镜组件和第三透镜组件相对第一透镜组件移动,实现变焦透镜的变焦;在变焦镜头处于不同的焦距状态时(如在第一目标焦距或第二目标焦距时),分别使用第三控制端和第四控制端控制第三透镜组件移动,来实现变焦镜头的对焦,第三控制端和第四控制端进行对焦时只需在对应的焦距状态下控制第三透镜组件进行较小行程范围的移动即可,第一驱动芯片的有效控制位较少也能够高精度控制透镜组的移动。变焦过程中,移动行程范围比较大,但精度要求较低,对焦过程中,移动行程范围较小,但精度要求较高,因此,变焦镜头通过合理的分配驱动芯片的多个控制端分别实现变焦和对焦,在驱动芯片有效控制位较少的情况下,保证了对焦的移动精度。
9.本技术的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施方式的实践了解到。
附图说明
10.本技术的实施方式的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
11.图1是本技术某些实施方式的电子装置的平面示意图。
12.图2是本技术某些实施方式的电子装置另一视角的平面示意图。
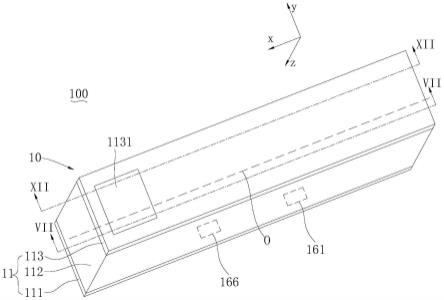
13.图3是本技术某些实施方式的变焦镜头的立体装配示意图。
14.图4是本技术某些实施方式的变焦镜头的立体分解示意图。
15.图5是本技术某些实施方式的第一驱动芯片的平面示意图。
16.图6是本技术某些实施方式的第二驱动芯片的平面示意图。
17.图7a和图7b是图3中的变焦镜头在不同焦距状态下沿vii-vii线的截面示意图。
18.图8是某些实施方式中变焦镜头的透镜的平面示意图。
19.图9a和图9b是某些实施方式中第二透镜组件和第三透镜组件在不同焦距状态下位置示意图。
20.图10是某些实施方式中变焦镜头的第二透镜组件和第三透镜组件的行程和电流的关系示意图。
21.图11是某些实施方式中变焦镜头被与图3中vii-vii线对应的剖面线截得的截面示意图。
22.图12是图3中的变焦镜头沿xii-xii线的截面示意图。
具体实施方式
23.以下结合附图对本技术的实施方式作进一步说明。附图中相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。
24.另外,下面结合附图描述的本技术的实施方式是示例性的,仅用于解释本技术的实施方式,而不能理解为对本技术的限制。
25.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
26.请参阅图1及图2,电子装置1000包括机壳200和相机模组100。相机模组100与机壳200结合。具体地,电子装置1000可以是手机、平板电脑、显示器、笔记本电脑、柜员机、闸机、智能手表、头显设备、游戏机等。本技术实施方式以电子装置1000是手机为例进行说明,可以理解,电子装置1000的具体形式并不限于手机。
27.机壳200可用于安装相机模组100,或者说,机壳200可作为相机模组100的安装载体。电子装置 1000包括正面901和背面902,相机模组100可设置在正面901作为前置摄像头,相机模组100还可设置在背面902作为后置摄像头,本技术实施方式中,相机模组100设置在背面902作为后置摄像头。机壳200还可用于安装电子装置1000的相机模组100、供电装置、通信装置等功能模块,以使机壳200为功能模块提供防尘、防摔、防水等保护。
28.请参阅图3至图5,相机模组100包括变焦镜头10和感光元件50,感光元件50安装在变焦镜头10 的像侧。感光元件50可以采用互补金属氧化物半导体(complementary metal oxide semiconductor,cmos) 感光元件,或者电荷耦合元件(charge-coupled device,ccd)感光元件。
29.请参阅图3至图6,本技术实施方式的变焦镜头10包括壳体11、第一透镜组件12、第二透镜组件 13、第三透镜组件14和第一驱动芯片161。第一透镜组件12、第二透镜组件13和第三透镜组件14设置在壳体11内,第一透镜组件12、第二透镜组件13和第三透镜组件14沿第一透镜组件12的光轴o依次设置,第一透镜组件12的光轴o、第二透镜组件13的光轴和第三透镜组件14的光轴重合。第一驱动芯片161包括第一控制端1611、第二控制端1612、第三控制端1613和第四控制端1614,第一控制端1611 和第二控制端1612分别用于控制第二透镜组件13和第三透镜组件14沿光轴o相对第一透镜组件12移动,以实现变焦镜头10的变焦;第三控制端1613用于在第一目标焦距下,控制第三透镜组件14沿光轴 o相对第一透镜组件12移动以实现变焦镜头10的对焦;第四控制端1614用于在第二目标焦距下,控制第三透镜组件14沿光轴o相对第一透镜组件12移动以实现变焦镜头10的对焦,第一目标焦距和第二
目标焦距不相同,第一目标焦距大于第二目标焦距,或者,第一目标焦距小于第二目标焦距,本技术实施方式中,第一目标焦距小于第二目标焦距。
30.本技术实施方式的变焦镜头10中,第一驱动芯片161通过第一控制端1611和第二控制端1612分别控制第二透镜组件13和第三透镜组件14沿光轴o相对第一透镜组件12移动,实现变焦透镜10的变焦;在变焦镜头10处于不同的焦距状态时(如在第一目标焦距或第二目标焦距时),分别使用第三控制端1613 和第四控制端1614控制第三透镜组件14移动,来实现变焦镜头10的对焦,第三控制端1613和第四控制端1614进行对焦时只需在对应的当前焦距状态下控制第三透镜组14件进行较小行程范围的移动即可,第一驱动芯片161的有效控制位较少也能够高精度控制透镜组件(如第二透镜组件13和第三透镜组件14) 的移动。变焦过程中,移动行程范围比较大,但精度要求较低,对焦过程中,移动行程范围较小,但精度要求较高,因此,变焦镜头10通过合理的分配驱动芯片的多个控制端分别实现变焦和对焦,在驱动芯片有效控制位较少的情况下,保证了对焦的移动精度。
31.如图3所示,为方便后续描述,平行于光轴o的方向被定义为x方向,垂直x方向的两个方向分别定义为y方向和z方向,即,x方向、y方向和z方向两两互相垂直。
32.请参阅图3、图4、图7a和图7b,变焦镜头10包括壳体11、棱镜组件15、第一透镜组件12、第二透镜组件13、第三透镜组件14和驱动组件16。棱镜组件15、第一透镜组件12、第二透镜组件13、第三透镜组件14依次设置在壳体11内。第二透镜组件13与第三透镜组件14均可在驱动组件16的控制下沿光轴o相对第一透镜组件12移动。
33.壳体11包括基板111、侧板112、和盖板113。基板111、侧板112和盖板113围成收容空间114,棱镜组件15、第一透镜组件12、第二透镜组件13、和第三透镜组件14均设置在收容空间114内。
34.基板111包括承载面1111。承载面1111平行于光轴o。承载面1111用于承载侧板112、棱镜组件15、第一透镜组件12、第二透镜组件13和第三透镜组件14。基板111可以是长方体结构、正方体结构、圆柱体结构、或其他形状的结构等,在此不作限制。本实施方式中,基板111为长方体结构。
35.承载面1111上开设有滑轨1112。滑轨1112的延伸方向与x方向平行。滑轨1112的数量为一个或多个,例如,滑轨1112的数量为一个、两个、三个、四个、甚至更多个。本实施方式中,滑轨1112的数量为两个(两个滑轨1112分别以第一滑轨1113和第二滑轨1114表示)。第一滑轨1113和第二滑轨1114的延伸方向与x方向平行,第二滑轨1114和第一滑轨1113沿y方向依次设置。在x方向上,第一滑轨1113 靠近棱镜组件15的一端与棱镜组件15之间的第一距离,和第二滑轨1114靠近棱镜组件15的一端与棱镜组件15之间的第二距离可相同,也可不相同。第一滑轨1113远离棱镜组件15的一端与棱镜组件15 之间的第三距离,和第二滑轨1114远离棱镜组件15的一端与棱镜组件15之间的第四距离可相同,也可不相同。例如,第一距离与第二距离不同可以是:第一距离大于第二距离。或者,第一距离小于第二距离。第三距离与第四距离不同可以是:第三距离大于第四距离。或者,第三距离小于第四距离。本实施方式中,第一距离大于第二距离,第三距离大于第四距离。如此,通过第一滑轨1113和第二滑轨1114 对第二透镜组件13和第三透镜组件14的移动进行限制。
36.侧板112自基板111的边缘环绕设置。侧板112垂直于基板111的承载面1111。侧板112可以通过胶合、螺合、卡合等方式设置在基板111上。侧板112还可以和基板111一体成
型。
37.侧板112包括与x方向平行的第一侧板1121和第二侧板1122,第一侧板1121和第二侧板1122相对。
38.请参阅图3和图4,盖板113设置在侧板112上,具体地,盖板113可通过卡合、螺合、胶合等方式安装在侧板112的上表面1123。
39.盖板113与侧板112相背的表面开设有入光口1131,入光口1131的深度方向可以与x方向垂直,以使相机模组100整体呈潜望式的结构。在其他实施方式中,入光口1131并非为通孔,而是一个透光实体结构,光线可从该透光实体结构入射进收容空间114内并进入棱镜组件15。
40.请参阅图7a和图7b,棱镜组件15设置在基板111的承载面1111上并位于收容空间114内,棱镜组件15包括安装台151和棱镜152。
41.安装台151设置在基板111的承载面1111上,具体地,安装台151可通过胶合、螺合、卡合等方式安装在承载面1111上,安装台151还可与基板111一体成型。安装台151设有进光通孔153、出光通孔 154和容置腔155。进光通孔153和出光通孔154将容置腔155与收容空间114连通。进光通孔153和入光口1131相对,出光通孔154与第一透镜组件12相对。
42.棱镜152设置在容置腔155内,棱镜152可通过胶合、卡合等方式安装在安装台151上。棱镜152 包括入射面156、反射面157和出射面158,反射面157倾斜连接入射面156和出射面158,反射面157 与承载面1111的夹角可以是15度、30度、45度、60度、75度等等,本实施方式中,反射面157与承载面1111的夹角为45度。入射面156与进光通孔153相对,出射面158与出光通孔154相对。反射面 157用于反射从入射面156射入的光线以使得光线从出射面158射出。棱镜152用于改变从进光通孔153 进入的光线的出射方向。棱镜152可以是三角棱镜152,具体地,棱镜152的截面为直角三角形,直角三角形的两条直角边分别由入射面156和出射面158形成,直角三角形的斜边由反射面157形成。
43.请参阅图4、图7a和图7b,第一透镜组件12包括第一外壳121和第一透镜组122。第一透镜组122 设置在第一外壳121内。
44.第一外壳121设置在收容空间114内,具体地,第一外壳121可通过胶合、螺合、卡合等方式安装在承载面1111上,第一外壳121还可与基板111一体成型。第一外壳121包括进光孔123、出光孔124 和收容腔125。进光孔123和出光孔124将收容腔125与收容空间114连通。进光孔123和棱镜组件15 的出光通孔154相对,出光孔124与第二透镜组件13相对。
45.第一透镜组122位于收容腔125内,第一透镜组122可通过胶合、螺合、卡合等方式安装在第一外壳121内。第一透镜组122和棱镜152的出射面158相对。第一透镜组122可具有正光焦度或负光焦度,本实施方式中,第一透镜组122具有负光焦度。
46.第一透镜组122包括一个或多个第一透镜1221。例如,第一透镜组122可以仅包括一枚第一透镜1221,第一透镜1221为凸透镜或凹透镜;或者第一透镜组122包括多枚第一透镜1221(如两枚、三枚等),多枚第一透镜1221可均为凸透镜或凹透镜,或部分为凸透镜,部分为凹透镜。本实施方式中,第一透镜组122包括两枚第一透镜1221。第一透镜1221可以是玻璃透镜或塑料透镜。
47.一个或多个第一透镜1221可以均为回转体的一部分,或者,部分为回转体,部分为回转体的一部分。本实施方式中,每个第一透镜1221均为回转体的一部分。例如,如图8所
示,第一透镜1221首先通过模具形成回转体透镜s1,回转体透镜s1被垂直于光轴o的面截得的形状为圆形,该圆形的直径为r,然后对回转体透镜s1的边缘进行切割,以形成第一透镜1221。第一透镜1221被垂直于光轴o的面截得的形状为矩形,矩形的两条边长分别为t1和t2,t1/r∈[0.5,1),t2/r∈[0.5,1)。例如,t1/r可以是0.5、0.6、0.7、0.75、0.8、0.95等等,t2/r可以是0.55、0.65、0.7、0.75、0.85、0.9等等。可以理解,t1/r和t2/r的具体比例根据电子装置1000的内部空间的大小、变焦镜头10的光学参数(如第一透镜1221有效光学区域大小)等因素确定。或者,第一透镜组122中的透镜均使用特制的模具直接制作,模具的模腔即为已经确定好t1/r和t2/r的具体比例的回转体的一部分,从而直接制成第一透镜1221。如此,第一透镜1221为回转体透镜s1的一部分,相较于完整的回转体透镜s1而言,体积较小,从而使得变焦镜头10的整体体积减小,有利于电子装置1000的小型化。
[0048]
请参阅图4、图7a和图7b,第二透镜组件13包括第二外壳131、第二透镜组132和第一滚珠133。第二透镜组132安装在第二外壳131内。在第二外壳131滑动时,第二外壳131带动第二透镜组132滑动。
[0049]
第二外壳131开设有与第二透镜组132对应的第一进光口135和第一出光口136。第二外壳131形成有第一容置空间137以收容第二透镜组132,第一容置空间137通过第一进光口135和第一出光口136 与收容空间114连通。第一进光口135和第一透镜组件12的出光孔124相对,第一出光口136和第三透镜组件14相对。
[0050]
第二外壳131还包括相背的第一顶面138和第一底面139(即,第二外壳131的与承载面1111相对的表面)。第一顶面138与盖板113相对。第一底面139与基板111的承载面1111相对。第一底面139 开设有第一凹槽1391,第一滚珠133设置在第一凹槽1391内并与滑轨1112的底部抵触,第一滚珠133 和滑轨1112滑动连接。
[0051]
具体地,第一凹槽1391与第一滚珠133的形状相匹配,例如,第一滚珠133为球形,移动阻力较小,第一凹槽1391为半圆形凹槽,第一滚珠133的直径和第一凹槽1391的直径相等,也即是说,第一滚珠 133的一半位于第一凹槽1391内。第一滚珠133和第一凹槽1391的结合较为紧密,在第一滚珠133移动时,可带动第二透镜组件13的第二外壳131移动。滑轨1112可以是承载面1111上形成的延伸方向与x 方向平行的凹槽,滑轨1112也可以是设置在承载面1111上的延伸方向与x方向平行的凸块,凸块的与第二外壳131的底面相对的表面形成有与第一滚珠133配合的凹槽。本实施方式中,滑轨1112为承载面1111 上形成的延伸方向与x方向平行的凹槽。在第二透镜组件13安装在收容空间114后,第一滚珠133的一部分位于滑轨1112内,并与滑轨1112的底部抵触。滑轨1112的内壁被垂直x方向的面截得的形状呈第一弧形,第一滚珠133的被垂直x方向的面截得的外轮廓呈第二弧形,且第一弧形的曲率和第二弧形的曲率相同。如此,在y方向上,第一滚珠133的外壁和滑轨1112的内壁结合较为紧密,第一滚珠133的外壁的相背两侧被滑轨1112的内壁的相背两侧抵触。
[0052]
第一凹槽1391的数量为一个或多个。例如,第一凹槽1391的数量为一个、两个、三个、四个、甚至更多个等,本实施方式中,第一凹槽1391的数量为三个。第一滚珠133的数量也可以是一个或多个。本实施方式中,第一滚珠133的数量与第一凹槽1391的数量相同,也为三个。三个第一凹槽1391间隔设置在第一底面139。
[0053]
滑轨1112的数量可根据三个第一凹槽1391的位置确定,例如,三个第一凹槽1391的连线平行于光轴o,则只需要设置一个滑轨1112即可;再例如,三个第一凹槽1391分两组
(下称第一组和第二组),第一组包括一个第一凹槽1391,第二组包括两个第一凹槽1391,且第一组的第一凹槽1391不在第二组的两个第一凹槽1391的连线上(即,三个第一凹槽1391可围成三角形),则需要两个滑轨1112与第一组和第二组分别对应。本实施方式中,三个第一凹槽1391分第一组和第二组,第一组包括一个第一凹槽 1391,第二组包括两个第一凹槽1391,第一组和第一滑轨1113对应,第二组和第二滑轨1114对应。如此,第一组对应的第一滚珠133在第一滑轨1113内滑动,第二组对应的第一滚珠133在第二滑轨1113 内滑动,第一组对应的第一滚珠133和第二组对应的第一滚珠133分别被限制在第一滑轨1113和第二滑轨1114内,三个第一滚珠133围成三角形(位于第一滑轨1113内的第一滚珠133的中心为三角形的顶点),在保证滑动稳定性的前提下,尽量减少第一滚珠133的数量,可减小滑动阻力。且由于在y方向上,第一组对应的第一滚珠133的外壁的相背两侧被第一滑轨1113的内壁的相背两侧抵触,第二组对应的第一滚珠133的外壁的相背两侧被第二滑轨1114的内壁的相背两侧抵触,三个第一滚珠133围成三角形,可防止第二透镜组件13在y方向上发生晃动或倾斜,从而保证相机模组100的成像质量不受影响。另外,由于第一距离大于第二距离,在第二透镜组件13沿x方向滑动时(即,滑向第一透镜组件12时),第一组对应的第一滚珠133被第一滑轨1114靠近棱镜组件15的一端抵触,以限制第二透镜组件13继续滑向第一透镜组件12,从而起到限制第二透镜组件13的移动行程的作用。
[0054]
第二透镜组132设置在第一容置空间137内。具体地,第二透镜组132可通过胶合、螺合、卡合等方式安装在第一容置空间137内。第二透镜组132可具有正光焦度或负光焦度,本实施方式中,第二透镜组132具有正光焦度。
[0055]
第二透镜组132包括一个或多个第二透镜1321。第二透镜组132可以仅包含一枚第二透镜1321,第二透镜1321为凸透镜或凹透镜;或者第二透镜组132包括多枚第二透镜1321(如两枚、三枚等),多枚第二透镜1321可均为凸透镜或凹透镜,或部分为凸透镜,部分为凹透镜。本实施方式中,第二透镜组132 包括三枚第二透镜1321。第二透镜1321可以是玻璃透镜或塑料透镜。
[0056]
请参阅图8,一个或多个第二透镜1321可以均为回转体的一部分,或者,部分为回转体,部分为回转体的一部分。本实施方式中,每个第二透镜1321均为回转体的一部分。例如,第二透镜1321首先通过模具形成回转体透镜s1,回转体透镜s1被垂直于光轴o的面截得的形状为圆形,该圆形的直径为r,然后对回转体透镜s1的边缘进行切割,以形成第二透镜1321。第二透镜1321被垂直于光轴o的面截得的形状为矩形,矩形的两条边长分别为t1和t2,t1/r∈[0.5,1),t2/r∈[0.5,1)。例如,t1/r可以是0.5、0.6、0.7、0.75、0.8、0.95等等,t2/r可以是0.55、0.65、0.7、0.75、0.85、0.9等等。可以理解,t1/r和t2/r的具体比例根据电子装置1000的内部空间的大小、变焦镜头10的光学参数(如第二透镜1321有效光学区域大小)等因素确定;或者,第二透镜1321均使用特制的模具直接制作,模具的模腔即为已经确定好t1/r和t2/r的具体比例的回转体的一部分,从而直接制成第二透镜1321。如此,第二透镜1321为回转体透镜s1的一部分,相较于完整的回转体透镜s1而言,体积较小,从而使得变焦镜头10的整体体积减小,有利于电子装置1000的小型化。需要注意的是:图8仅用于示意第一透镜1221 和第二透镜1321,并不用于表示第二透镜1321的尺寸,更不应理解为第二透镜1321的尺寸和第一透镜 1221的尺寸相同。
[0057]
请参阅图4、图7a和图7b,第三透镜组件14包括第三外壳141、第三透镜组142和第
三滚珠143。第三透镜组142安装在第三外壳141内。在第三外壳141滑动时,第三外壳141带动第三透镜组142滑动。
[0058]
第三外壳141开设有与第三透镜组142对应的第二进光口145和第二出光口146。第三外壳141形成有第二容置空间147以收容第三透镜组142,第二容置空间147通过第二进光口145和第二出光口146 与收容空间114连通。第二进光口145和第二透镜组件13的第一出光口136相对,第二出光口135和感光元件50相对(其中,感光元件50设置在侧板112的与第二出光口135相对的内侧面上)。
[0059]
第三外壳141还包括相背的第二顶面148和第二底面149(第三外壳141的与承载面1111相对的表面)。第二顶面148与盖板113相对。第二底面149与基板111的承载面1111相对。第二底面149开设有第三凹槽1491,第三滚珠143设置在第三凹槽1491内并与滑轨1112的底部抵触,第三滚珠143和滑轨 1112滑动连接。
[0060]
具体地,第三凹槽1491与第三滚珠143的形状相匹配,例如,第三滚珠143为球形,移动阻力较小,第三凹槽1491为半圆形凹槽,第三滚珠143的直径和第三凹槽1491的直径相等,也即是说,第三滚珠 143的一半位于第三凹槽1491内。第三滚珠143和第三凹槽1491的结合较为紧密,在第三滚珠143移动时,可带动第三透镜组件14的第三外壳141移动。在第三透镜组件14安装在收容空间114后,第三滚珠143的一部分位于滑轨1112内并与滑轨1112的底部抵触。滑轨1112的内壁被垂直x方向的面截得的形状呈第一弧形,第三滚珠143的被垂直x方向的面截得的外轮廓呈第二弧形,且第一弧形的曲率和第二弧形的曲率相同。如此,在y方向上,第三滚珠143的外壁和滑轨1112的内壁结合较为紧密,第三滚珠143的外壁的相背两侧被滑轨1112的内壁的相背两侧抵触。
[0061]
第三凹槽1491的数量为一个或多个。例如,第三凹槽1491的数量为一个、两个、三个、四个、甚至更多个等,本实施方式中,第三凹槽1491的数量为三个。第三滚珠143的数量也可以是一个或多个。本实施方式中,第三滚珠143的数量与第三凹槽1491的数量相同,也为三个。三个第三凹槽1491间隔设置在第二底面149。
[0062]
本实施方式中,三个第三凹槽1491分第三组和第四组,第三组包括一个第三凹槽1491,第四组包括两个第三凹槽1491,第三组和第一滑轨1113对应,第四组和第二滑轨1114对应。如此,第三组的第三凹槽1491对应的第三滚珠143在第一滑轨1113内滑动,第四组的第三凹槽1491对应的第三滚珠143在第二滑轨1113内滑动,第三组对应的第三滚珠143和第四组对应的第三滚珠143分别被限制在第一滑轨 1113和第二滑轨1114内,三个第三滚珠143围成三角形,在保证滑动稳定性的前提下,尽量减少第三滚珠143的数量,可减小滑动阻力。且由于在y方向上,第三组对应的第三滚珠143的外壁的相背两侧被第一滑轨1113的内壁的相背两侧抵触,第四组对应的第三滚珠143的外壁的相背两侧被第二滑轨1114 的内壁的相背两侧抵触,三个第三滚珠143围成三角形,可防止第三透镜组件14在y方向上发生晃动或倾斜,从而保证相机模组100的成像质量不受影响。另外,在第三透镜组件14沿x方向的反方向滑动时 (即,滑向感光元件50时),第三组对应的第三滚珠143会先接触第一滑轨1113的靠近感光元件50的一端,从而限制第三透镜组件14继续沿x方向的反方向滑动,第一滑轨1113可起到限制第三透镜组件14的移动行程的作用。第三组对应的第三滚珠143被第一滑轨1114远离棱镜组件15的一端抵触,以限制第二透镜组件13继续滑向第一透镜组件12,从而起到限制第二透镜组件13的移动行程的作用。且相较于第一距离等于第二距离,第
三距离等于第四距离而言,第一距离大于第二距离、及第三距离大于第四距离时,第一滑轨1113的长度较小。
[0063]
第三透镜组142设置在第二容置空间147内。具体地,第三透镜组142可通过胶合、螺合、卡合等方式安装在第二容置空间147内。第三透镜组142可具有正光焦度或负光焦度,本实施方式中,第三透镜组142具有负光焦度。
[0064]
第三透镜组142包括一个或多个第三透镜1421。第三透镜组142仅包含一枚第三透镜1421,第三透镜1421为凸透镜或凹透镜;或者第三透镜组142包括多枚第三透镜1421(如两枚、三枚等),多枚第三透镜1421可均为凸透镜或凹透镜,或部分为凸透镜,部分为凹透镜。本实施方式中,第三透镜组142包括两枚第三透镜1421。第三透镜1421可以是玻璃透镜或塑料透镜。
[0065]
请再次参阅图8,一个或多个第三透镜1421可以均为回转体的一部分,或者,部分为回转体,部分为回转体的一部分。本实施方式中,每个第三透镜1421均为回转体的一部分。例如,第三透镜1421首先通过模具形成回转体透镜s1,回转体透镜s1被垂直于光轴o的面截得的形状为圆形,该圆形的直径为r,然后对回转体透镜s1的边缘进行切割,以形成第三透镜1421。第三透镜1421被垂直于光轴o的面截得的形状为矩形,矩形的两条边长分别为t1和t2,t1/r∈[0.5,1),t2/r∈[0.5,1)。例如,t1/r 可以是0.5、0.6、0.7、0.75、0.8、0.95等等,t2/r可以是0.55、0.65、0.7、0.75、0.85、0.9等等。可以是可以理解,t1/r和t2/r的具体比例根据电子装置1000的内部空间的大小、变焦镜头10的光学参数 (如第三透镜1421有效光学区域大小)等因素确定;或者,第三透镜1421均使用特制的模具直接制作,模具的模腔即为已经确定好t1/r和t2/r的具体比例的回转体的一部分,从而直接制成第三透镜1421。如此,第二透镜1321为回转体透镜s1的一部分,相较于完整的回转体透镜s1而言,体积较小,从而使得变焦镜头10的整体体积减小,有利于电子装置1000的小型化。需要注意的是:图8仅用于示意第一透镜1221、第二透镜1321和第三透镜1421,并不用于表示第三透镜1421的尺寸,更不应理解为第三透镜1421的尺寸、第二透镜1321的尺寸和第一透镜1221的尺寸相同。
[0066]
请参阅图4、图7a和图7b,驱动组件16包括第一驱动件162、第二驱动件163、防抖驱动件164、第一驱动芯片161和第二驱动芯片166。第一驱动芯片161和第一驱动件162及第二驱动件163连接,第二驱动芯片166和防抖驱动件164连接。
[0067]
第一驱动件162包括第一线圈1621和第一磁铁1622。
[0068]
第一线圈1621为一个或多个,例如,第一线圈1621的数量为一个、两个、三个、四个、甚至更多个等,本实施方式中,第一线圈1621的数量为一个。第一线圈1621设置在第一侧板1121或第二侧板1122 上,本实施方式中,第一线圈1621设置在第一侧板1121的内侧面上,第一线圈1621可通过胶合、螺合、卡合等方式安装在第一侧板1121上。在其他实施方式中,第一线圈1621为两个,两个第一线圈1621分别相对设置在第一侧板1121和第二侧板1122上。第一线圈1621可以设置在第一侧板1121的任意位置,例如,第一线圈1621可以设置在第一侧板1121的内侧面(即,位于收容空间114内的表面),并位于第二透镜组132和第三透镜组142之间;或者,第一线圈1621可以设置在第一侧板1121的内侧面,并位于第一透镜组件12和第二透镜组件13之间等等,在此不再赘述。本实施方式中,第一线圈1621可以设置在第一侧板1121的内侧面,并位于第二透镜组132和第三透镜组142之间。在其他实施方式
中,第一线圈1621可以设置第一外壳121上并与第一磁铁1622相对。
[0069]
第一磁铁1622与第二透镜组132连接,具体地,第一磁铁1622设置在第二外壳131上,第一磁铁 1622可设置在第二外壳131的任意位置上,例如,第一磁铁1622设置在第二外壳131的与第三外壳141 相对的表面,或者,第一磁铁1622设置在第二外壳131的与第一透镜组件12相对的表面等等。本实施方式中,第一磁铁1622设置在第二外壳131的与第三外壳141相对的表面。第一磁铁1622可通过胶合、螺合、卡合等方式安装在第二外壳131上。第一磁铁1622可以是具有磁性的金属,例如,第一磁铁1622 可以是铁、钴和镍中任意一种,或者,第一磁铁1622可以是由铁、钴和镍中至少两种组成的合金。
[0070]
第二驱动件163包括第二线圈1631和第二磁铁1632。
[0071]
第二线圈1631为一个或多个,例如,第二线圈1631的数量为一个、两个、三个、四个、甚至更多个等,本实施方式中,第二线圈1631的数量为一个。第二线圈1631设置在第一侧板1121或第二侧板1122 上,本实施方式中,第二线圈1631设置在第一侧板1121上,第二线圈1631可通过胶合、螺合、卡合等方式安装在第一侧板1121上。在其他实施方式中,第二线圈1631为两个,两个第二线圈1631分别相对设置在第一侧板1121和第二侧板1122上。第二线圈1631可以设置在侧板112的任意位置,例如,第二线圈1631可以设置在第一侧板1121的内侧面,并位于第二透镜组132和第三透镜组142之间;或者,第二线圈1631可以设置在第一侧板1121的内侧面,并位于第三透镜组142的与第二透镜组132相背的一侧;或者,第二线圈1631可以设置在侧板112的与第三透镜组142相对的内侧面(即,第二线圈1631 位于第三透镜组142的与第二透镜组132相背的一侧并与第二磁铁1632相对)等等,在此不再赘述。本实施方式中,第二线圈1631设置在第一侧板1121的内侧面,并位于第三透镜组142的与第二透镜组132 相背的一侧。
[0072]
第二磁铁1632与第三透镜组142连接,具体地,第二磁铁1632设置在第三外壳上,第二磁铁1632 可设置在第三外壳141的任意位置上,例如,第二磁铁1632设置在第三外壳141的与第二外壳131相对的表面,或者,第二磁铁1632设置在第三外壳141的与感光元件50相对的表面等等。本实施方式中,第二磁铁1632设置在第三外壳141的与感光元件50相对的表面,第二磁铁1632可通过胶合、螺合、卡合等方式安装在第二外壳131上。第二磁铁1632可以是具有磁性的金属,例如,第二磁铁1632可以是铁、钴和镍中任意一种,或者,第二磁铁1632可以是由铁、钴和镍中至少两种组成的合金。
[0073]
在其他实施方式中,第一线圈1621设置在第二外壳131的任意位置上,例如,第一线圈1621设置在第二外壳131的与第三外壳141相对的表面,或者,第一线圈1621设置在第二外壳131的与第一透镜组件12相对的表面等等。第一磁铁1622设置在第一侧板1121或第二侧板1122上。例如,第一磁铁1622 设置在第一侧板1121上,具体为,第一磁铁1622设置在第一侧板1121的内侧面,并位于第二透镜组132 和第三透镜组142之间。
[0074]
第二线圈1631设置在第三外壳141的任意位置上,例如,第二线圈1631设置在第三外壳141的与第二外壳131相对的表面,或者,第二线圈1631设置在第三外壳141的与感光元件50相对的表面等等。第二磁铁1632设置在第一侧板1121或第二侧板1122上。例如,第二磁铁1632设置在第一侧板1121上,具体为,第二磁铁1632设置在第一侧板1121的内侧面,并位于第三透镜组142的与第二透镜组132相背的一侧。
[0075]
请参阅图3、图4、图7a和图7b,在某些实施方式中,第一驱动件162和第二驱动件
163还可以是线性电机,第一驱动件162的第一线性电机的定子可固定安装在侧板112的内侧面上,第一线性电机的动子自定子延伸并与第二外壳131连接,第二驱动件163的第二线性电机的定子也固定安装在侧板112 的内侧面上,第二线性电机的动子自定子延伸并与第三外壳141连接,当第一线性电机的动子做直线伸缩运动时,从而带动第二外壳131能够沿光轴o直线移动,当第二线性电机的动子做直线伸缩运动时,从而带动第三外壳141能够沿光轴o直线移动。当然,第一驱动件162和第二驱动件163还可以是其他结构,例如液压结构、压电马达等,在此不再一一列举。
[0076]
请参阅图3、图4、图7a和图7b,防抖驱动件164包括电机1641和连接架1642。连接架1642的一端连接电机1641,另一端与壳体11连接,连接架1642固定连接棱镜组件15的安装台151,安装台151 和承载面1111抵触。
[0077]
电机1641可以是步进电机。电机1641用于驱动连接架1642沿第一方向运动以带动棱镜组件15沿第一方向移动,电机还用于驱动连接架1642沿第二方向运动以带动棱镜组件15沿第二方向移动。
[0078]
请结合图5和图6,第一驱动芯片161包括第一控制端1611、第二控制端1612、第三控制端1613和第四控制端1614。第一驱动芯片161与第一驱动件162和第二驱动件163均连接。第一控制端1611通过第一驱动件161与第二透镜组件连接,具体地,第一控制端1611与第一线圈1621连接,第二控制端1612、第三控制端1613均和第四控制端1614均与第二线圈1631连接。第一驱动芯片161设置在基板111上,例如基板111本身即为电路板,第一驱动芯片161为电路板的一部分。在壳体11内可进行布线,以实现第一驱动芯片161与第一线圈1621和第二线圈1631连接,第一驱动芯片161通过第一线圈1621和第一磁铁1622的磁性连接、第二线圈1631与第二磁铁1632的磁性连接以分别实现与第二透镜组件13和第三透镜组件14的连接。
[0079]
第一驱动芯片161包括多个引脚。第一驱动芯片161的有效控制位大于或等于10,以使得第二透镜组件13和第三透镜组件14的最小移动单位符合预定移动精度,其中,最小移动单位为驱动芯片161可控制第二透镜组件13和/或第三透镜组件14每次移动的最小距离,预定移动精度对应的最小移动单位可以是0.5μm、1μm、2μm等,本技术实施方式中,预定移动精度对应的最小移动单位为0.5μm。例如,第一驱动芯片161的有效控制位可以是10、11、12、13、14、15、16等等。该有效控制位为第一驱动芯片161所有引脚中可用于控制透镜组件(如第二透镜组件13和/或第三透镜组件14)移动的引脚(下称第一控制引脚)的数量,例如第一驱动芯片161中可用于控制透镜组件移动的引脚数为10(即,第一控制引脚的数量为10),则第一驱动芯片161的有效控制位为10。
[0080]
第一驱动芯片161通过10个第一控制引脚控制第一控制端1611、第二控制端1612、第三控制端1613 和第四控制端1614的信号输出。例如,第一驱动芯片161可向第一控制端1611、第二控制端1612、第三控制端1613和第四控制端1614输出电流信号、电压信号等,本技术实施方式中,第一驱动芯片161 可向第一控制端1611、第二控制端1612、第三控制端1613和第四控制端1614输出电流信号。
[0081]
第二驱动芯片166用于控制变焦镜头10在第一方向和第二方向的移动以实现光学防抖,第一方向和第二方向垂直。第一方向平行于承载面1111且垂直于光轴o(即,第一方向为平行变焦镜头10的y方向的方向),第二方向垂直于承载面1111(即,第二方向为平行变焦
镜头10的z方向的方向),也即是说,光轴o、第一方向和第二方向两两垂直。如此,变焦镜头10通过控制棱镜组件15沿垂直于光路o的第一方向和第二方向移动,可以改变因用户抖动带来的光路的偏差,从而抵消用户的抖动对拍摄的影响,实现光学防抖。变焦镜头10通过第二驱动芯片166单独实现变焦镜头的光学防抖,由于光学防抖时变焦镜头10整体的移动行程范围也较小,第二驱动芯片166有效控制位即使较少也能够高精度控制变焦镜头的移动从而实现光学防抖。
[0082]
第二驱动芯片166包括第一防抖控制端1661和第二防抖控制端1662。第一防抖控制端1661和第二防抖控制端166均与防抖驱动件164连接。第二驱动芯片166也可设置在基板111上,通过在侧板112、连接板1644及连接臂1643上进行布线以和电机1641连接;在其他实施方式中,第二驱动芯片166可直接设置在电机166上。
[0083]
具体地,第一防抖控制端1661和第二防抖控制端166均与电机1641连接。第一防抖控制端1661通过控制电机1641工作以控制变焦镜头10在第一方向上的移动,第二防抖控制端1662通过控制电机1641 工作以控制变焦镜头10在第二方向上的移动,以实现对变焦镜头10的抖动的补偿,实现光学防抖。
[0084]
第二驱动芯片166包括多个引脚。第二驱动芯片166的有效控制位大于或等于10,例如,第二驱动芯片166的有效控制位可以是10、11、12、13、14、15、16等等。该有效控制位为第二驱动芯片166所有引脚中可用于控制变焦镜头10整体移动的引脚(下称第二控制引脚)的数量,例如第二驱动芯片166 中可用于控制变焦镜头10整体移动的引脚数为10(即,第二控制引脚的数量为10),则第二驱动芯片166 的有效控制位为10。
[0085]
第二驱动芯片166通过10个第二控制引脚控制第一防抖控制端1661和第二防抖控制端1662的信号输出。例如,第二驱动芯片166可向第一防抖控制端1661和第二防抖控制端1662输出电流信号、电压信号等,本技术实施方式中,第二驱动芯片166可向第一防抖控制端1661和第二防抖控制端1662输出电流信号。
[0086]
本技术实施方式中,在变焦过程中,变焦镜头10所需的精度较低,例如为2微米(μm),第一控制端1611和第二控制端1612在每次输出不同的电流信号时,分别控制第二透镜组件13和第三透镜组件14 最少移动2微米。第一驱动芯片161通过10个第一控制引脚可输出2
10
个不同的电流信号,即,第一控制端1611和第二控制端1612均可输出2
10
个不同的电流信号,则第二透镜组件13和第三透镜组件14在变焦时的最大的行程范围为2
10
*2=4096μm,也即是说,第二透镜组件13和第三透镜组件14的移动行程的起点和终点之间的距离最大可以是4096μm。
[0087]
本技术实施方式中,在对焦和光学防抖过程中,变焦镜头10在对焦和光学防抖时的移动精度需小于或等于0.5微米才能保证变焦镜头10对焦和光学防抖的准确性,同时调节因变焦精度较低带来的误差,例如,变焦镜头10的对焦时的移动精度等于0.5μm,表示第三控制端1613和第四控制端1614每次输出不同的电流信号时,第三透镜组件14最少要移动0.5μm,第一防抖控制端1661和第二防抖控制端1162 每次输出不同的电流信号时,变焦镜头10整体最少要移动0.5μm,第一驱动芯片161通过10个第一控制引脚可输出2
10
个不同的电流信号,即,第三控制端1613和第四控制端1614可输出2
10
个不同的电流信号,则第三透镜组件14在对焦时的最大的行程范围为2
10
*0.5=512μm,也即是说,第二透镜组件13和第三透镜组件14的移动行程的起点和终点之间的距离最大可以是512μm。第二驱动芯片166通过10个
第二控制引脚也可输出2
10
个不同的电流信号,即,第一防抖控制端1661和第二防抖控制端1662可输出 2
10
个不同的电流信号,则变焦镜头10整体的最大的行程范围为2
10
*0.5=512μm,也即是说,变焦镜头 10整体在第一方向或第二方向的移动行程的起点和终点之间的距离最大可以是512μm。
[0088]
请参阅图5、图7a和图7b,在用户使用电子装置1000拍照时,用户可手动选择长焦模式或短焦模式,长焦模式通常用于拍摄远处的物体,取景范围较小,短焦模式(俗称广角模式)通常用于拍摄近处的物体,取景范围较大。当用户选择好所需的拍摄模式时,手机的的处理器会发出控制指令,第一驱动芯片161在接收到控制指令后开始控制第二透镜组件13和第三透镜组件14沿光轴o相对第一透镜组件 12移动,以实现变焦镜头10在第一目标焦距和第二目标焦距之间切换,第一目标焦距可以是短焦状态,第二目标焦距可以是长焦状态。
[0089]
具体地,第一控制端1611输出电流信号以控制输入第一线圈1621内的电流,当第一线圈1621内通电时,第一线圈1621和第一磁铁1622之间均产生洛伦兹力,当洛伦兹力大于第二透镜组件13和滑轨之间的静摩擦力时,第一磁铁1622被洛伦兹力推动以带动第二透镜组件13沿着第一滑轨1113和第二滑轨 1114移动,第一控制端1611可通过控制输入第一线圈1621内的电流的方向来控制洛伦兹力的方向,以使得第二透镜组件13沿x方向或与x方向相反的方向移动,随着第一驱动芯片161输出的电流信号的变化,输入第一线圈1621内的电流同时发生变化,第二透镜组件13可在固定的行程范围(下称第一行程范围,如第一行程范围为图9a和图9b中滑轨的ab段,为[0μm,4096μm])内移动,随着输入第一线圈 1621内电流发生变化,第二透镜组件13的行程同样发生变化,其中,行程s(单位为μm)和电流i(单位为毫安(ma))的对应关系如图10所示,a位置对应的行程为0um,b位置的行程为4096um。可以理解,当手机使用状态不同时,移动第二透镜组件13所需的洛伦兹力也是不同的,对应所需的电流也是不同的,例如当手机处于竖直状态(即垂直于地面)时,此时若第二透镜组件13向靠近地面方向(即,x 方向的反方向)移动时,洛伦兹力f1加上第二透镜组件13的重力大于第二透镜组件13和滑轨之间的静摩擦力即可带动第二透镜组件13移动,此时所需的洛伦兹力f1较小,如图10中曲线s1,第二透镜组件13的行程开始改变时对应的电流i1较小。而当第二透镜组件13向远离地面方向(即,x方向)移动时,洛伦兹力f2要大于第二透镜组件13的重力加上第二透镜组件13和滑轨之间的静摩擦力,才带动第二透镜组件13移动,此时所需的洛伦兹力f2较大,如图10中曲线s3,第二透镜组件13的行程开始改变时对应的电流i2较大。而在手机处于水平状态(即平行于地面)时,此时第二透镜组件13向x方向或 x方向的反方向移动时,均只需洛伦兹力f3要大于第二透镜组件13和滑轨之间的静摩擦力即可,此时所需的洛伦兹力f3位于洛伦兹力f1和洛伦兹力f2之间,如图10中曲线s2,第二透镜组件13的行程开始改变时对应的电流i3位于电流i1和电流i2之间。如此,通过第一控制端1611控制输入第一线圈1621 内的电流,即可控制第二透镜组件13的行程。
[0090]
第二控制端1612输出电流信号以控制输入第二线圈1631内的电流,当第二线圈1631内通电时,第二线圈1631和第二磁铁之间均产生洛伦兹力,当洛伦兹力大于第三透镜组件14和滑轨之间的静摩擦力时,第二磁铁被洛伦兹力推动以带动第三透镜组件14沿着第一滑轨和第二滑轨移动,第二控制端1612 可通过控制输入第二线圈1631内的电流的方向来控制洛伦兹力的方向,以使得第二透镜组件13沿x方向或与x方向相反的方向移动,随着
第一驱动芯片161输出的电流信号的变化,输入第二线圈1631内的电流同时发生变化,第三透镜组件14可在固定的行程范围(下称第二行程范围,如第二行程范围为图9a 和9b中滑轨的cd段,为[0μm,4096μm])内移动,随着输入第二线圈1631内电流发生变化,第三透镜组件14的行程同样发生变化,其中,行程和电流的对应关系如图10所示,c位置对应的行程为0um,d 位置的行程为4096um。可以理解,当手机使用状态不同时,移动第三透镜组件13所需的洛伦兹力也是不同的,对应所需的电流也是不同的,由于移动第三透镜组件13所需的洛伦兹力及对应的电流的变化和移动第三透镜组件13所需的洛伦兹力及对应的电流的变化基本相同,具体解释请参阅前述描述,在此不再赘述。如此,通过第二控制端1612控制输入第二线圈1631内的电流,即可控制第三透镜组件14的行程。
[0091]
长焦状态和短焦状态下,第二透镜组件13和第三透镜组件14分别对应的不同的行程。例如,在长焦状态下,第二透镜组件13和第三透镜组件14的行程分别为p0和m0;在短焦状态下,第二透镜组件 13和第三透镜组件14的行程分别p1和行程m1,其中,p0、p1位于第一行程范围内,m0和m1位于第二行程范围内。根据手机当前所处的状态(如竖直状态或水平状态)及透镜组件(如第二透镜组件13和第三透镜组件14)移动的方向即可确定行程s和电流i的映射曲线,例如手机处于水平状态,可根据映射曲线s2,确定p0和p1分别对应的电流i4和i5,m0和m1分别对应的电流i6和i7,例如第二透镜组件13初始时位于a位置,第三透镜组件14初始时位于c位置,第一控制端1611口控制输入第一线圈 1621的电流为i4,第二控制端1612控制输入第二线圈1631的电流为i6,即可将第二透镜组件13移动到p0位置处,将第三透镜组件14移动到m0位置处,从而使得变焦镜头10切换为长焦状态。同样的,第二透镜组件13初始时位于a位置,第三透镜组件14初始时位于c位置,第一控制端1611控制输入第一线圈1621的电流为i5,第二控制端1612控制输入第二线圈1631的电流为i7,即可将第二透镜组件 13移动到p1位置处,将第三透镜组件14移动到m1位置处,从而使得变焦镜头10切换为短焦状态。
[0092]
本技术实施方式中,变焦镜头10处于短焦状态时(如图7a所示的状态)第一透镜组122与第二透镜组132的第一轴上间距z11大于变焦镜头10处于长焦状态时(如图7b所示的状态)第一透镜组122 与第二透镜组132的第一轴上间距z12,变焦镜头10处于短焦状态时第二透镜组132与第三透镜组142 的第二轴上间距z21大于变焦镜头10处于长焦状态时的第二透镜组132与第三透镜组142的第二轴上间距z21。也即是说,在变焦镜头10从短焦状态变化到长焦状态时,第二透镜组132靠近第一透镜组122 移动(第一轴上间距减小),第三透镜组142靠近第二透镜组132移动,且第二轴上间距减小。在其他实施方式中,变焦镜头10处于短焦状态时的第一轴上间距z11小于变焦镜头10处于长焦状态时的的第一轴上间距z12,变焦镜头10处于短焦状态时的第二轴上间距z21小于变焦镜头10处于长焦状态时的第二轴上间距z22;或者,变焦镜头10处于短焦状态时的第一轴上间距z11小于变焦镜头10处于长焦状态时的第一轴上间距z12,变焦镜头10处于短焦状态时的第二轴上间距z21大于变焦镜头10处于长焦状态时的第二轴上间距z22等等,变焦镜头10从短焦状态切换为长焦状态时,第一轴上间距z1和第二轴上间距z2的变化趋势可根据第一透镜组122至第三透镜组142的参数(如面型参数、非球面系数参数等等) 确定,在此不再一一列举。
[0093]
可以理解,变焦镜头10根据第一轴上间距和第二轴上间距减小的幅度,焦距的变化幅度也不同,例如随着第一轴上间距和第二轴上间距均逐渐减小,变焦镜头10的焦距逐
渐增大。再例如,随着第一轴上间距和第二轴上间距逐渐减小,变焦镜头10的焦距逐渐增大等。本实施方式中,随着第一轴上间距和第二轴上间距逐渐减小,变焦镜头10的焦距逐渐增大。如此,变焦镜头10可以控制焦距倍数逐渐变化,例如随着第一轴上间距和第二轴上间距逐渐减小,焦距从初始焦距的1倍逐渐变化为初始焦距(初始焦距为变焦镜头10处于短焦状态时的焦距)的10倍,从而使得变焦镜头10实现10倍光学变焦。
[0094]
可以理解,在变焦过程中,第二透镜组件13和第三透镜组件14的移动行程范围较大,由于第一驱动芯片161的有效控制位的限制,变焦过程中第一控制端1611和第二控制端1612分别控制第二透镜组件13和第三透镜组件14的移动的精度会低于对焦所要求的精度,在变焦完成后,可进行高精度的对焦以保证变焦镜头10实现准确的焦距调节,从而提升成像品质。
[0095]
当变焦镜头10完成变焦后,手机可通过相机模组100获取被摄物体的图像,同时实时判断图像的清晰度是否达到预设清晰度,图像的清晰度可通过计算图像的反差比获得。在成像时,光线依次经盖板113 的入光口1131、棱镜组件15的进光通孔153后被棱镜152的反射面157反射后从出光通孔154射出,然后光线再依次经过第一透镜组件12的进光孔123、第一透镜组122、和出光孔124、第二透镜组件13的第一进光口135、第二透镜组132和第一出光口136、及第三透镜组件14的第二进光口145、第三透镜组 142和第二出光口146,最终到达感光元件50上进行成像。
[0096]
在图像的清晰度未达到预设清晰度时,说明此时的焦距并不能使得被摄物体清晰的成像,此时需要进行对焦,对焦的过程是对焦距进行轻微的调整,相较于变焦大幅度的调整焦距而言,对焦过程并不会改变变焦镜头10当前的状态(如短焦状态或长焦状态)。
[0097]
在实现对焦的过程中,例如变焦镜头10处于短焦状态(即,如图9a所示,第二透镜组件13位于p0 位置处,第三透镜组件14位于m0位置处),第三控制端1613控制输入第二线圈1631的电流,使得第三透镜组以p0为起始位置开始移动,每次均以最小移动精度进行移动(如0.5μm),例如对焦的行程范围为[0μm,512μm](如图9a中的e位置和f位置分别对应0μm和512μm,m0位置对应该行程范围中的 256μm),第三控制端1613可控制第三透镜组件14沿着x方向移动,每进行一次移动(即,移动0.5μm),即获取一次被摄物体的图像的清晰度并判断该清晰度是否达到预设清晰度,若直至移动到e位置时清晰度仍未达到预设清晰度,则控制第三透镜组件14快速移动到m0位置(如控制输入第二线圈1631的电流刚好可使得第三透镜组件14沿x方向的反方向移动256μm),然后控制第三透镜组件14沿x方向的反方向向f位置继续移动,直至被摄物体的图像的清晰度达到预设清晰度才确定对焦完成,此时第三控制端 1613控制第三透镜组件14停止移动。
[0098]
在实现对焦的过程中,例如变焦镜头10处于长焦状态(即,如图9b所示,第二透镜组件13位于p1 位置处,第三透镜组件14位于m1位置处),第四控制端1614控制输入第二线圈1631的电流,使得第三透镜组以p1为起始位置开始移动,每次均以最小移动精度进行移动(如0.5μm),例如对焦的行程范围为[0μm,512μm](如图9b中的g位置和h位置分别对应0μm和512μm,m1位置对应该行程范围中的 256μm),第四控制端1614可控制第三透镜组件14沿着x方向移动,每进行一次移动(即,移动0.5μm),即获取一次被摄物体的图像的清晰度并判断该清晰度是否达到预设清晰度,若直至移动到g位置时清晰度仍未达到预设清晰度,则控制第三透镜组件14快速移动到m1位置(如控制输入第二线圈1631的电流刚好可使得第三透
镜组件14沿x方向的反方向移动256μm),然后控制第三透镜组件14沿x方向的反方向向h位置继续移动,直至被摄物体的图像的清晰度达到预设清晰度才确定对焦完成,此时第四控制端 1614控制第三透镜组件14停止移动。如此,可准确地完成变焦镜头10在短焦状态和长焦状态下的对焦,且由于在短焦状态和长焦状态下的对焦时的移动形成范围均较小,因此第一驱动芯片161的有效控制位较少(如10位)也可以实现控制第三透镜组件14高精度的移动(每次最少可移动0.5μm),从而保证对焦的准确性。
[0099]
在用户使用手机进行拍摄的过程中,由于用户一般没有使用稳定器(如手持云台等)进行拍摄,由于用户手抖,可能导致变焦镜头10受到抖动的影响而使得拍摄的画面变糊,手机一般安装有陀螺仪,用于检测用户的抖动,在获取到到用户的抖动数据后,处理器可生成对应的移动控制指令并发送给第二驱动芯片166,第二驱动芯片166通过第四五控制端1661和第二防抖控制端1662分别控制电机1641驱动连接架1642沿第一方向运动以带动变焦镜头10沿第一方向移动及控制电机1641驱动连接架1642沿第二方向运动以带动变焦镜头10沿第二方向移动,从而抵消用户的抖动对拍摄的影响,实现光学防抖。
[0100]
请参阅图5和图11,在某些实施方式中,变焦镜头10还包括设置在壳体11内的第四透镜组件17,第二驱动芯片166还包括第五控制端1663,第五控制端1663用于控制第四透镜组17件沿光轴o相对第一透镜组件12移动。
[0101]
具体地,变焦镜头10为了实现更大范围的焦距的改变,例如实现50倍光学变焦,可设置可移动的第四透镜组件17,第一透镜组件12、第二透镜组件13、第三透镜组件14和第四透镜组件17沿着光轴o 依次设置,并通过第五控制端1663控制第四透镜组件17沿x方向或x方向的反方向移动,以实现更大的焦距范围的改变。
[0102]
请参阅图12,在某些实施方式中,盖板113还可包括盖板本体1132和凸台1133,凸台1133与盖板本体1132连接,第一透镜组件12设置在凸台1133内,第一透镜组件12的第一透镜组122与棱镜152 的入射面156相对。
[0103]
具体地,凸台1133开设有安装空间1135,安装空间1135与收容空间114连通,第一透镜组件12设置在安装空间1135内,第一透镜组件12形成有光轴o’,光轴o’和光轴o垂直。第一透镜组件12可通过胶合、螺合、卡合等方式安装在安装空间1135内,第一透镜组件12还可与凸台1133一体成型。凸台1133的与棱镜组件15相背的端面开设有入光口1131,入光口1131的深度方向可以与光轴o’平行,以使相机模组100整体呈潜望式的结构。入光口1131与第一外壳121的进光孔123,出光孔124与棱镜组件15的进光通孔153相对。如此,可减少变焦镜头10在某一方向(如x方向)上的长度。
[0104]
请参阅图4、图7a和图7b,在某些实施方式中,第一顶面138开设有第二凹槽1381,第二透镜组件13还包括第二滚珠134,第二滚珠134设置在第二凹槽1381内并与盖板113抵触。
[0105]
具体地,第二凹槽1381与第二滚珠134的形状相匹配,例如,第二滚珠134为球形,移动阻力较小,第二凹槽1381为半圆形凹槽,第二滚珠134的直径和第二凹槽1381的直径相等,也即是说,第二滚珠 134的一半位于第二凹槽1381内。第二滚珠134和第二凹槽1381的结合较为紧密,在第二滚珠134移动时,可带动第二透镜组件13的第二外壳131移动。第二凹槽1381的数量为一个或多个。例如,第二凹槽1381的数量为一个、两个、三个、四个、甚至更多个等,本实施方式中,第二凹槽1381的数量为三个。第二滚珠134的数量也可以是一个或
多个。本实施方式中,第二滚珠134的数量与第二凹槽1381的数量相同,也为三个。三个第二凹槽1381间隔设置在第二外壳131的第一顶面138。第二滚珠134设置在第二凹槽1381内并与盖板113抵触,使得第二透镜组件13被限制在盖板113和基板111之间,可防止第二透镜组件13发生z方向的晃动或倾斜,从而保证成像质量不受影响。
[0106]
请参阅图4、图7a和图7b,在某些实施方式中,盖板113的与第一顶面138相对的表面形成有滑道 1134,第二滚珠134设置在第二凹槽1381内并与滑道1134的底部抵触。
[0107]
具体地,滑道1134可以是盖板113的与第一顶面138相对的表面上形成的延伸方向与x方向平行的凹槽,滑道1134也可以是设置在盖板113的与第一顶面138相对的表面上的延伸方向与x方向平行的凸块,凸块的与第二外壳131的第一顶面138相对的表面形成有与第二滚珠134配合的凹槽。本实施方式中,滑道1134为盖板113的与第一顶面138相对的表面上形成的延伸方向与x方向平行的凹槽。在第二透镜组件13安装在收容空间114后,第二滚珠134的一部分位于滑道1134内,并与滑道1134的底部抵触。滑道1134的内壁被垂直x方向的面截得的形状呈第三弧形,第二滚珠134被垂直x方向的面截得的外轮廓呈第四弧形,且第三弧形的曲率和第四弧形的曲率相同。如此,在y方向上,第二滚珠134的外壁和滑道1134的内壁结合较为紧密,第二滚珠134的外壁的相背两侧被滑道1134的内壁的相背两侧抵触。
[0108]
滑道1134的数量可根据三个第二凹槽1381的位置确定,例如,三个第二凹槽1381的连线平行于光轴o,则只需要设置一个滑道1134即可;再例如,三个第二凹槽1381分两组(下称第五组和第六组),第五组包括一个第二凹槽1381,第六组包括两个第二凹槽1381,且第五组的第二凹槽1381不在第六组的两个第二凹槽1381的连线上(即,三个第二凹槽1381可围成三角形),则需要两个滑道1134与第五组和第六组分别对应。本实施方式中,三个第二凹槽1381分第五组和第六组,第五组包括一个第二凹槽 1381,第六组包括两个第二凹槽1381,滑道1134的数量为两个(下称第一滑道1157和第二滑道1158),第五组和第一滑道1157对应,第六组和第二滑道1158对应。如此,第五组对应的第二滚珠134在第一滑道1157内滑动,第六组对应的第二滚珠134在第二滑轨1113内滑动,第五组对应的第二滚珠134和第六组对应的第二滚珠134分别被限制在第一滑道1157和第二滑道1158内,三个第二滚珠134围成三角形,在保证滑动稳定性的前提下,尽量减少第二滚珠134的数量,可减小滑动阻力。且由于在y方向上,第五组对应的第二滚珠134的外壁的相背两侧被第一滑道1157的内壁的相背两侧抵触,第六组对应的第二滚珠134的外壁的相背两侧被第二滑道1158的内壁的相背两侧抵触,三个第二滚珠134围成三角形,可防止第二透镜组件13在y方向上发生晃动或倾斜,从而保证相机模组100的成像质量不受影响。
[0109]
请参阅图4、图7a和图7b,在某些实施方式中,第二顶面148开设有第四凹槽1481,第三透镜组件 14还包括第四滚珠144,第四滚珠144设置在第四凹槽1481内并与盖板113抵触。
[0110]
具体地,第四凹槽1481与第四滚珠144的形状相匹配,例如,第四滚珠144为球形,移动阻力较小,第四凹槽1481为半圆形凹槽,第四滚珠144的直径和第四凹槽1481的直径相等,也即是说,第四滚珠 144的一半位于第四凹槽1481内。第四滚珠144和第四凹槽1481的结合较为紧密,在第四滚珠144移动时,可带动第三透镜组件14的第三外壳141移动。第四凹槽1481的数量为一个或多个。例如,第四凹槽1481的数量为一个、两个、三个、四个、甚至更多个等,本实施方式中,第四凹槽1481的数量为三个。第四滚珠144的数量也可以是一个或
多个。本实施方式中,第四滚珠144的数量与第四凹槽1481的数量相同,也为三个。三个第四凹槽1481间隔设置在第三外壳141的第二顶面148。第四滚珠144设置在第四凹槽1481内并与盖板113抵触,使得第三透镜组件14被限制在盖板113和基板111之间,可防止第三透镜组件14发生z方向的晃动或倾斜,从而保证成像质量不受影响。
[0111]
请参阅图4、图7a和图7b,在某些实施方式中,盖板113的与第二顶面148相对的表面形成有滑道 1134,第四滚珠144设置在第四凹槽1481内并与滑道1134的底部抵触。
[0112]
在第三透镜组件14安装在收容空间114后,第四滚珠144的一部分位于滑道1134内并与滑道1134 的底部抵触。滑道1134的内壁被垂直x方向的面截得的形状呈第三弧形,第四滚珠144被垂直x方向的面截得的外轮廓呈第四弧形,且第三弧形的曲率和第四弧形的曲率相同。在y方向上,第四滚珠144的外壁和滑道1134的内壁结合的较为紧密,第四滚珠144的外壁的相背两侧被滑道1134的内壁的相背两侧抵触。
[0113]
本实施方式中,三个第四凹槽1481分第七组和第八组,第七组包括一个第四凹槽1481,第八组包括两个第四凹槽1481,第七组和第一滑道1157对应,第八组和第二滑道1158对应。如此,第七组对应的第四滚珠144在第一滑道1157内滑动,第八组对应的第四滚珠144在第二滑轨1113内滑动,第七组对应的第四滚珠144和第八组对应的第四滚珠144分别被限制在第一滑道1157和第二滑道1158内,三个第四滚珠144围成三角形,在保证滑动稳定性的前提下,尽量减少第四滚珠144的数量,可减小滑动阻力。且由于在y方向上,第七组对应的第四滚珠144的外壁的相背两侧被第一滑道1157的内壁的相背两侧抵触,第八组对应的第四滚珠144的外壁的相背两侧被第二滑道1158的内壁的相背两侧抵触,三个第四滚珠144围成三角形,可防止第二透镜组件13在y方向上发生晃动或倾斜,从而保证相机模组100的成像质量不受影响。
[0114]
在本说明书的描述中,参考术语“某些实施方式”、“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”的描述意指结合实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
[0115]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个,除非另有明确具体的限定。
[0116]
尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型,本技术的范围由权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。