1.本实用新型涉及数控切割锯技术领域,尤其涉及一种铝门窗型材双头数控切割锯。
背景技术:
2.机电一体化的切割机称之为数控切割锯,例如数控等离子、火焰切割机,它们是通过数字程序驱动机床运动的,随着机床运动时,随机配带的切割工具对物体进行切割。
3.现有的数控切割锯在使用过程中,难以精确的控制切割面,会造成加工难度提升,加工品质不高等问题,因此,本实用新型提出一种铝门窗型材双头数控切割锯以解决现有技术中存在的问题。
技术实现要素:
4.针对上述问题,本实用新型提出一种铝门窗型材双头数控切割锯,该铝门窗型材双头数控切割锯主要是利用弹性较强的拖链,配合上伸缩杆台和气动推杆的伸缩调节,让设备加工时的稳定性提升,以防止切割时导致的偏差造成物料的损失,而且由于切割构件的末端由多组的调节构件组合而成,这样使得两组切割机构在使用时,能够做的相互配合,并精确的调节切割位置,使得切割的精度能够提升,有效的调节切割的方位与位置,提升了加工的品质。
5.为实现本实用新型的目的,本实用新型通过以下技术方案实现:一种铝门窗型材双头数控切割锯,包括支架组件和切割机构,所述支架组件的顶侧设置有螺栓装配的夹持组件,所述支架组件的两侧上方设置有螺栓装配的两组吊装组件,所述吊装组件的顶侧一端设置有螺栓连接的切割机构;
6.所述切割机构包括换向筒、拖链、伸缩杆台、气动推杆、电动旋转座、第一电机、转动伸缩杆、加工台、电动旋转棒、伺服电机、齿盘套和电锯盘,所述换向筒螺栓连接在所述吊装组件的顶侧一端,所述换向筒贯穿有设置在吊装组件顶侧的拖链,所述拖链贯穿换向筒连接有伸缩杆台,且所述伸缩杆台的下方设置有气动推杆,所述气动推杆的下方连接有电动旋转座的输出端,所述电动旋转座的一侧设置有第一电机,且所述第一电机的输出端贯穿所述电动旋转座连接有转动伸缩杆,所述转动伸缩杆的一端设置有加工台,且所述加工台,的下方设置有电动旋转棒的输出端,所述电动旋转棒的下方设置有伺服电机,且所述伺服电机的输出端贯穿所述齿盘套连接有电锯盘。
7.进一步改进于,所述拖链呈长条状,所述齿盘套呈半弧状构造,所述电锯盘的边缘呈锯齿状。
8.进一步改进于,所述支架组件包括支撑垫、壳体和床座台,所述支撑垫的上方设置有壳体,且所述壳体的顶侧设置有螺栓装配的床座台。
9.进一步改进于,所述夹持组件包括第一螺栓座、废料盒、电磁棒组、网格罩、第一滑动杆、滑杆、滑台和气动压盘,所述废料盒通过第一螺栓座螺栓连接在所述床座台的顶侧,
所述废料盒的内底侧设置有电磁棒组,且所述电磁棒组方上方平行设置有网格状构造的网格罩。
10.进一步改进于,所述废料盒的内夹层通过第一滑动杆滑动连接有滑杆,且所述滑杆上滑动连接有两组滑台,所述滑台上设置有气动压盘。
11.进一步改进于,所述吊装组件包括电动丝杆盒、滑动支架、横梁、电磁滑轨和电磁滑块,所述电动丝杆盒设置在所述床座台的两侧上方,所述电动丝杆盒上设置有螺纹连接有滑动支架,且所述滑动支架的顶侧设置有横梁,所述横梁上通过电磁滑轨滑动连接有电磁滑块。
12.本实用新型的有益效果为:
13.本实用新型主要是利用弹性较强的拖链,配合上伸缩杆台和气动推杆的伸缩调节,让设备加工时的稳定性提升,以防止切割时导致的偏差造成物料的损失,而且由于切割构件的末端由多组的调节构件组合而成,这样使得两组切割机构在使用时,能够做的相互配合,并精确的调节切割位置,使得切割的精度能够提升,有效的调节切割的方位与位置,提升了加工的品质。
附图说明
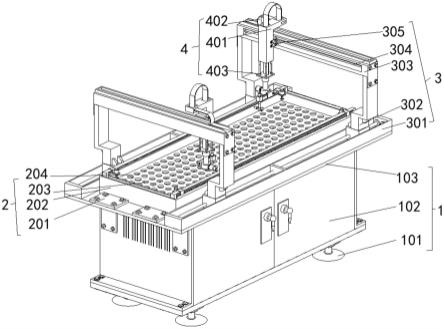
14.图1为本实用新型的立体结构示意图;
15.图2为本实用新型的侧视立体结构示意图;
16.图3为本实用新型的夹持组件立体结构示意图;
17.图4为本实用新型的电动旋转座与第一电机立体结构示意图;
18.图5为本实用新型的齿盘套与电锯盘立体结构示意图。
19.其中:1、支架组件;101、支撑垫;102、壳体;103、床座台;2、夹持组件;201、第一螺栓座;202、废料盒;203、电磁棒组;204、网格罩;205、第一滑动杆;206、滑杆;207、滑台;208、气动压盘;3、吊装组件;301、电动丝杆盒;302、滑动支架;303、横梁;304、电磁滑轨;305、电磁滑块;4、切割机构;401、换向筒;402、拖链;403、伸缩杆台;404、气动推杆;405、电动旋转座;406、第一电机;407、转动伸缩杆;408、加工台;409、电动旋转棒;4010、伺服电机;4011、齿盘套;4012、电锯盘。
具体实施方式
20.为了加深对本实用新型的理解,下面将结合实施例对本实用新型做进一步详述,本实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
21.根据图1-5所示,本实施例提出了一种铝门窗型材双头数控切割锯,包括支架组件1和切割机构4,支架组件1的顶侧设置有螺栓装配的夹持组件2,支架组件1的两侧上方设置有螺栓装配的两组吊装组件3,吊装组件3的顶侧一端设置有螺栓连接的切割机构4;
22.切割机构4包括换向筒401、拖链402、伸缩杆台403、气动推杆404、电动旋转座405、第一电机406、转动伸缩杆407、加工台408、电动旋转棒409、伺服电机4010、齿盘套4011和电锯盘4012,换向筒401螺栓连接在吊装组件3的顶侧一端,换向筒401贯穿有设置在吊装组件3顶侧的拖链402,拖链402贯穿换向筒401连接有伸缩杆台403,且伸缩杆台403的下方设置有气动推杆404,气动推杆404的下方连接有电动旋转座405的输出端,电动旋转座405的一
侧设置有第一电机406,且第一电机406的输出端贯穿电动旋转座405连接有转动伸缩杆407,转动伸缩杆407的一端设置有加工台408,且加工台408,的下方设置有电动旋转棒409的输出端,电动旋转棒409的下方设置有伺服电机4010,且伺服电机4010的输出端贯穿齿盘套4011连接有电锯盘4012。
23.拖链402呈长条状,齿盘套4011呈半弧状构造,电锯盘4012的边缘呈锯齿状。
24.本实施例中,当电磁滑块305运行加工的横向位置时,由换向筒401与拖链402的相互贯穿下,使得拖链402与伸缩杆台403的相互配合下,使得气动推杆404的稳定性得以提升,这样方便铺设线路,之后启动气动推杆404输出动力,配合上电动旋转座405以调节第一电机406的实时位置,同时启动第一电机406输出动力带动转动伸缩杆407以调节加工台408的精确位置,使得电动旋转棒409在输出动力下,让伺服电机4010最终到达有效的加工位置,最终启动伺服电机4010输出动力带动齿盘套4011内侧的电锯盘4012高速转动,对着网格罩204上方固定好的原料进行有效的切割。
25.支架组件1包括支撑垫101、壳体102和床座台103,支撑垫101的上方设置有壳体102,且壳体102的顶侧设置有螺栓装配的床座台103。
26.本实施例中,支撑垫101能够支撑壳体102将设备放置在加工的地点,并且在壳体102的顶侧螺栓连接上床座台103以方便用户安装设备的其它组件。
27.夹持组件2包括第一螺栓座201、废料盒202、电磁棒组203、网格罩204、第一滑动杆205、滑杆206、滑台207和气动压盘208,废料盒202通过第一螺栓座201螺栓连接在床座台103的顶侧,废料盒202的内底侧设置有电磁棒组203,且电磁棒组203方上方平行设置有网格状构造的网格罩204。
28.本实施例中,首先,在床座台103的顶侧利用第一螺栓座201螺栓连接上废料盒202,使得废料盒202的内底侧设置上电磁棒组203,并在电磁棒组203的顶侧安装上网格罩204,以方便废料的下落,在电磁棒组203的吸引下能够放置切割时,防止金属废料的飞溅。
29.废料盒202的内夹层通过第一滑动杆205滑动连接有滑杆206,且滑杆206上滑动连接有两组滑台207,滑台207上设置有气动压盘208。
30.本实施例中,之后将需要切割的原料放置在网格罩204上,接着利用第一滑动杆205滑动两组滑杆206运行到适合的位置,同时使用滑杆206上的滑台207运行到原料的合适位置,这样启动气动压盘208输出动力,使得气动压盘208的底端将原料进行有效的固定起来。
31.吊装组件3包括电动丝杆盒301、滑动支架302、横梁303、电磁滑轨304和电磁滑块305,电动丝杆盒301设置在床座台103的两侧上方,电动丝杆盒301上设置有螺纹连接有滑动支架302,且滑动支架302的顶侧设置有横梁303,横梁303上通过电磁滑轨304滑动连接有电磁滑块305。
32.本实施例中,当原料固定起来时,启动两组的电动丝杆盒301,使得电动丝杆盒301驱动滑动支架302实时的运行到加工的位置,让横梁303精确的位于加工位置的上方,接着启动横梁303上的电磁滑轨304输出动力带动电磁滑块305滑动使得电磁滑块305运行到加工的横向位置。
33.该铝门窗型材双头数控切割锯的工作原理是:首先,在床座台103的顶侧利用第一螺栓座201螺栓连接上废料盒202,使得废料盒202的内底侧设置上电磁棒组203,并在电磁
棒组203的顶侧安装上网格罩204,之后将需要切割的原料放置在网格罩204上,接着利用第一滑动杆205滑动两组滑杆206运行到适合的位置,同时使用滑杆206上的滑台207运行到原料的合适位置,这样启动气动压盘208输出动力,使得气动压盘208的底端将原料进行有效的固定起来,当原料固定起来时,启动两组的电动丝杆盒301,使得电动丝杆盒301驱动滑动支架302实时的运行到加工的位置,让横梁303精确的位于加工位置的上方,接着启动横梁303上的电磁滑轨304输出动力带动电磁滑块305滑动使得电磁滑块305运行到加工的横向位置,当电磁滑块305运行加工的横向位置时,由换向筒401与拖链402的相互贯穿下,使得拖链402与伸缩杆台403的相互配合下,使得气动推杆404的稳定性得以提升,这样方便铺设线路,之后启动气动推杆404输出动力,配合上电动旋转座405以调节第一电机406的实时位置,同时启动第一电机406输出动力带动转动伸缩杆407以调节加工台408的精确位置,使得电动旋转棒409在输出动力下,让伺服电机4010最终到达有效的加工位置,最终启动伺服电机4010输出动力带动齿盘套4011内侧的电锯盘4012高速转动,对着网格罩204上方固定好的原料进行有效的切割,以方便废料的下落,在电磁棒组203的吸引下能够放置切割时,防止金属废料的飞溅。
34.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。