技术特征:
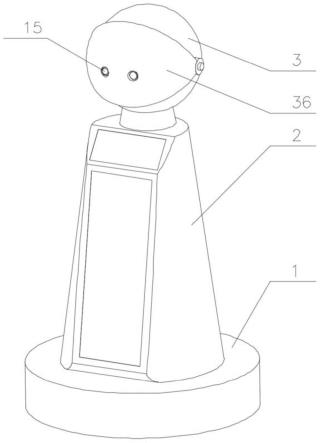
1.一种测温移动机器人,其特征在于:包括底部呈空心结构的底座(1)、设置于底座(1)顶部的机身(2)以及设置于机身(2)顶部的头部(3),所述底座(1)底部设置有行走机构,所述头部(3)内部中空,且所述头部(3)前侧面相对两侧均开设有沿其竖直方向设置的弧形槽,两个所述弧形槽内部均设置有测温机构;所述行走机构包括底盘(4)、转轴(5)、环体(6)、固定板(7)、第一减震弹簧(8)、活动块(9)、连接柱(10)、伸缩杆(11)、第二减震弹簧(12)、支撑轮(13)以及履带(14),所述底盘(4)设置于底座(1)底部,所述转轴(5)有四个,且四个所述转轴(5)两个为一组,两组所述转轴(5)沿底盘(4)长度方向呈对称设置在底盘(4)外侧面上,所述环体(6)通过固定板(7)设置在转轴(5)外侧,且所述固定板(7)有若干个,若干个固定板(7)环形阵列于环体(6)与转轴(5)之间,所述固定板(7)远离底盘(4)一侧面上开设有活动槽,所述第一减震弹簧(8)一端固定连接在活动槽靠近转轴(5)一侧槽壁上,另一端与活动块(9)相连接,所述活动块(9)活动设置于活动槽内部,所述连接柱(10)固定连接在活动块(9)外侧面上,所述伸缩杆(11)设置于连接柱(10)与转轴(5)之间,所述第二减震弹簧(12)设置于伸缩杆(11)外侧面上,所述支撑轮(13)有若干个,且每个所述支撑轮(13)分别固定设置于对应的连接柱(10)远离活动块(9)一端上,若干个所述支撑轮(13)围合成一个圆形结构,且圆形中心点与转轴(5)中心点重合,所述履带(14)套设于若干个所述支撑轮(13)围合成的圆形结构外侧面上;所述测温机构包括测温件(15)、齿条板(16)、滑套(17)、齿轮(18)、转杆(19)、主动轮(20)、蜗杆(21)、从动轮(22)、皮带(23)以及蜗轮(24),所述测温件(15)有两个,两个所述测温件(15)设置于对应的弧形槽内部,所述齿条板(16)固定设置于头部(3)前侧内侧面上,且位于两个测温件(15)之间,所述滑套(17)呈u形结构,且所述滑套(17)一侧内壁与齿条板(16)前侧面活动连接,所述齿轮(18)位于滑套(17)内部,且与齿条板(16)相啮合,所述转杆(19)一端与齿轮(18)靠近滑套(17)内侧壁一侧面固定连接,另一端贯穿滑套(17)延伸至外侧,且与主动轮(20)固定连接,所述蜗杆(21)活动设置于头部(3)内部中心位置,且所述蜗杆(21)上固定连接有从动轮(22),所述从动轮(22)与主动轮(20)位置相对应,所述皮带(23)套设于主动轮(20)与从动轮(22)外侧面上,所述蜗轮(24)活动设置于头部(3)内部,且所述蜗轮(24)与蜗杆(21)相啮合。2.根据权利要求1所述的一种测温移动机器人,其特征在于:所述底座(1)底部中心固定设置有圆台,所述圆台顶面与底座(1)底部之间设有安装空间,所述圆台中心开设有安装槽,所述底盘(4)固定设置于安装槽内部。3.根据权利要求2所述的一种测温移动机器人,其特征在于:所述伸缩杆(11)两端分别固定连接有第一连接块以及第二连接块,所述第一连接块与第二连接块分别固定连接在转轴(5)外表面以及连接柱(10)上。4.根据权利要求3所述的一种测温移动机器人,其特征在于:所述行走机构还包括第一驱动组件,所述第一驱动组件包括主动辊(25)、从动辊(26)、第一锥形齿轮(27)、第二锥形齿轮(28)、驱动电机(29)、第一齿轮(30)、第二齿轮(31)以及传动带(32),所述底盘(4)上位于转轴(5)两侧对称设置有两个导向孔,所述主动辊(25)与从动辊(26)分别活动设置于对应的导向孔内部,且所述主动辊(25)位于从动辊(26)后侧,所述主动辊(25)上固定连接有第一锥形齿轮(27),所述第一锥形齿轮(27)外侧面顶部啮合有第二锥形齿轮(28),所述第二锥形齿轮(28)与驱动电机(29)输出端固定连接,所述驱动电机(29)固定设置于底盘(4)
顶部,所述第一齿轮(30)与第二齿轮(31)分别固定设置于主动辊(25)以及从动辊(26)外侧面上,且所述主动辊(25)与从动辊(26)位于同一平面上,所述传动带(32)套设于主动辊(25)与从动辊(26)外侧面上。5.根据权利要求4所述的一种测温移动机器人,其特征在于:所述行走机构还包括传动组件,所述传动组件包括第一传动齿轮(33)、第二传动齿轮(34)以及传动链(35),所述第一传动齿轮(33)、第二传动齿轮(34)以及传动链(35)均有四个,且四个所述第一传动齿轮(33)分别固定连接在主动辊(25)远离底盘(4)一端上,四个所述第二传动齿轮(34)分别固定连接在转轴(5)远离底盘(4)一端上,四个所述传动链(35)分别套设于对应的第一传动齿轮(33)与第二传动齿轮(34)外侧面上。6.根据权利要求1所述的一种测温移动机器人,其特征在于:所述测温机构还包括防护组件,所述防护组件包括防护罩(36),所述防护罩(36)与头部(3)外侧面贴合,且所述防护罩(36)两端与头部(3)相对两侧面活动连接,所述防护罩(36)上对称设置有两个探孔,两个所述探孔内部前端均固定连接有防护玻璃,所述测温件(15)前端卡接在探孔内部。7.根据权利要求6所述的一种测温移动机器人,其特征在于:所述测温机构还包括导向组件,所述导向组件包括导向杆(37)、导向块(38)、连接板(39)以及滑块(40),所述导向杆(37)与导向块(38)均有两个,且两个所述导向杆(37)沿头部(3)内部前侧面设置,且位于所述齿条板(16)两侧,两个所述导向块(38)分别活动连接在对应的导向杆(37)上,两个所述导向块(38)相对一侧面上均固定连接有连接板(39)一端,两个所述连接板(39)另一端分别与对应的滑套(17)外侧面相连接,所述头部(3)内部前侧面中部位置开设有滑槽,所述滑块(40)活动设置于滑槽内部,且所述滑块(40)后侧面与齿条板(16)前侧面相连接。8.根据权利要求7所述的一种测温移动机器人,其特征在于:所述测温机构还包括第二驱动组件,所述第二驱动组件包括伺服电机(41)以及安装套(42),所述伺服电机(41)通过安装套(42)连接在连接板(39)顶部上,所述转杆(19)一端贯穿主动轮(20)且与伺服电机(41)输出端固定连接。9.根据权利要求8所述的一种测温移动机器人,其特征在于:所述头部(3)内侧顶部固定连接有支撑板,所述蜗轮(24)活动连接在支撑板靠近头部(3)竖直方向中轴线一侧面上。
技术总结
本发明公开了一种测温移动机器人,涉及智能机器人技术领域,本发明包括底部呈空心结构的底座、设置于底座顶部的机身以及设置于机身顶部的头部,底座底部设置有行走机构,头部内部中空,且头部前侧面相对两侧均开设有沿其竖直方向设置的弧形槽,两个弧形槽内部均设置有测温机构,行走机构包括底盘、转轴、环体、固定板、第一减震弹簧、活动块、连接柱、伸缩杆、第二减震弹簧、支撑轮以及履带,测温机构包括测温件、齿条板、滑套、齿轮、转杆、主动轮、蜗杆、从动轮、皮带以及蜗轮。本发明为一种测温移动机器人,通过设置的行走机构与测温机构,提高了机器人移动时的稳定性,满足了不同身高的人体、不同高度位置的测量物体的测温要求。不同高度位置的测量物体的测温要求。不同高度位置的测量物体的测温要求。
技术研发人员:马春光 解冰 王天渤 侯艳雁 卓海林 郭金东 郭卓雅 卓珈仪
受保护的技术使用者:苏州中康科技有限公司
技术研发日:2022.06.17
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。