1.本发明涉及自动驾驶技术领域,尤其涉及自动驾驶车辆辅助设备,具体来说涉及一种自动驾驶车辆方向盘辅助设备。
背景技术:
2.近年来,随着自动驾驶技术的快速发展,相关法律法规对人们驾驶自动驾驶汽车的安全性和可靠性提出了越来越高的要求,目前在自动驾驶技术领域中,驾驶人员安全操作和法规规定驾驶人员应该随时参与方向盘的控制,要求驾驶人员双手不能离开方向盘。
3.在实现本发明构思的过程中,发明人发现相关技术中至少存在如下问题:出于安全角度的考虑,驾驶人员需要一直手扶方向盘,而且还不能干预方向盘的操作。从而实现车辆的安全行驶,但是驾驶人员长时间扶着方向盘,方向盘却不能给驾驶人员提供支撑,驾驶人员会感觉到劳累、疲惫,时间久了,可能会导致驾驶人员患上肩周炎等疾病,严重影响驾驶人员的身体健康。
技术实现要素:
4.有鉴于此,本发明要解决的技术问题在于提供一种自动驾驶车辆方向盘辅助设备,解决了相关技术中驾驶人员驾驶自动驾驶车辆时,通常情况下手扶方向盘却不能干预方向盘的操作,驾驶人员会感觉到劳累、疲惫,时间久了,会对驾驶人员的身体造成损害的问题。
5.为了解决上述技术问题,本发明的具体实施方式提供一种自动驾驶车辆方向盘辅助设备,包括:滑轨,固定设置在自动驾驶车辆方向盘上,其中,所述滑轨包括锁死机构;全方向盘手托,滑动设置在所述滑轨上;以及气动开关,固定设置在自动驾驶车辆方向盘上,用于通过气体压力变化触发所述锁死机构,将所述全方向盘手托锁死在所述滑轨上。
6.根据本发明的上述具体实施方式可知,在自动驾驶车辆方向盘上设置一条滑轨,并在滑轨上设置至少一套手托,正常情况下,驾驶人员可以将手放在全方向盘手托上,全方向盘手托在滑轨上自由滑动,手托给驾驶人员的手臂提供支撑,紧急情况驾驶人员用力握全方向盘手托下侧的气动电子开关,气动电子开关触发锁死结构,全方向盘手托卡在滑轨上,全方向盘手托不能在滑轨上滑动,驾驶人员接管自动驾驶车辆,驾驶人员人工驾驶车辆,可以至少部分地解决相关技术中驾驶人员驾驶自动驾驶车辆时,通常情况下手扶方向盘却不能干预方向盘的操作,驾驶人员会感觉到劳累、疲惫,时间久了,会对驾驶人员的身体造成损害的问题,并因此可以避免驾驶人员长期驾驶自动驾驶车辆对驾驶人员的身体造成损害,在实现驾驶人员安全驾驶自动驾驶车辆的同时,满足法律法规要求的技术效果。
7.应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本发明所欲主张的范围。
附图说明
8.下面的所附附图是本发明的说明书的一部分,其绘示了本发明的示例实施例,所附附图与说明书的描述一起用来说明本发明的原理。
9.图1为本发明具体实施方式提供的一种自动驾驶车辆方向盘辅助设备的组成示意图。
10.图2为本发明具体实施方式提供的一种滑轨的结构示意图。
11.图3为本发明具体实施方式提供的一种全方向盘手托的结构示意图。
12.图4为本发明具体实施方式提供的一种锁死机构的结构示意图。
13.图5为本发明具体实施方式提供的一种气动开关的结构示意图。
14.图6为本发明另一具体实施方式提供的一种锁死机构的结构示意图。
15.图7为本发明具体实施方式提供的一种锁死机构抵挡片的结构示意图。
16.图8为本发明具体实施方式提供的一种自动驾驶车辆方向盘辅助设备的爆炸图。
17.附图标记说明:
18.w自动驾驶车辆方向盘1滑轨
19.2全方向盘手托3气动开关
20.11锁死机构12轨道
21.13卡扣辅助室111凸起
22.112电磁铁113弹性件
23.114第一电磁铁电源开关115第二电磁铁电源开关
24.116手动拨片117楔形件
25.118第一抵挡片119第二抵挡片
26.121通孔131通槽
27.21滑槽22支撑部位
28.211凹槽31气囊
29.32气囊开关p1第一位置
30.p2第二位置p3第三位置
具体实施方式
31.为使本发明实施例的目的、技术方案和优点更加清楚明白,下面将以附图及详细叙述清楚说明本发明所揭示内容的精神,任何所属技术领域技术人员在了解本发明内容的实施例后,当可由本发明内容所教示的技术,加以改变及修饰,其并不脱离本发明内容的精神与范围。
32.本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。另外,在附图及实施方式中所使用相同或类似标号的元件/构件是用来代表相同或类似部分。
33.关于本文中所使用的“第一”、“第二”、
…
等,并非特别指称次序或顺位的意思,也非用以限定本发明,其仅为了区别以相同技术用语描述的元件或操作。
34.关于本文中所使用的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本创作。
35.关于本文中所使用的“包含”、“包括”、“具有”、“含有”等等,均为开放性的用语,即意指包含但不限于。
36.关于本文中所使用的“及/或”,包括所述事物的任一或全部组合。
37.关于本文中的“多个”包括“两个”及“两个以上”;关于本文中的“多组”包括“两组”及“两组以上”。
38.关于本文中所使用的用语“大致”、“约”等,用以修饰任何可以微变化的数量或误差,但这些微变化或误差并不会改变其本质。一般而言,此类用语所修饰的微变化或误差的范围在部分实施例中可为20%,在部分实施例中可为10%,在部分实施例中可为5%或是其他数值。本领域技术人员应当了解,前述提及的数值可依实际需求而调整,并不以此为限。
39.某些用以描述本技术的用词将于下或在此说明书的别处讨论,以提供本领域技术人员在有关本技术的描述上额外的引导。
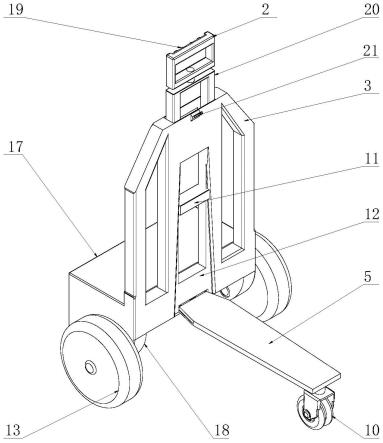
40.本发明的可选实施例提供一种自动驾驶车辆方向盘辅助设备,可以包括:滑轨1,固定设置在自动驾驶车辆方向盘w上,其中,所述滑轨包括锁死机构11。全方向盘手托2,滑动设置在所述滑轨1上。气动开关3,固定设置在自动驾驶车辆方向盘w上,用于通过气体压力变化触发所述锁死机构11,将所述全方向盘手托2锁死在所述滑轨1上。
41.图1为本发明具体实施方式提供的一种自动驾驶车辆方向盘辅助设备的组成示意图。
42.本发明的可选实施例中,如图1所示,自动驾驶车辆方向盘辅助设备可以包括:滑轨1、全方向盘手托2和气动开关3。
43.具体地,滑轨1固定设置在自动驾驶车辆方向盘w上,其中,所述滑轨包括锁死机构11。全方向盘手托2滑动设置在所述滑轨1上。气动开关3固定设置在自动驾驶车辆方向盘w上,气动开关3用于通过气体压力变化触发所述锁死机构11,将所述全方向盘手托2锁死在所述滑轨1上。
44.本发明的可选实施例中,滑轨1可以粘在自动驾驶车辆方向盘w上,也可以卡在自动驾驶车辆方向盘w上,也可以像方向盘套似的套在自动驾驶车辆方向盘w上。滑轨1的材质可以为金属、非金属、塑料、橡胶、陶瓷等,也可以为上述材质的组合,本发明不以此为限。全方向盘手托2可以通过滑轨滑动设置在滑轨1上,也可以通过滑槽滑动设置在滑轨1上。气动开关3通过气体压力变化触发所述锁死机构11。例如,驾驶人员手握气动开关3的气囊可以改变气囊内气体压力,从而触发锁死机构11的开关将全方向盘手托2锁死在滑轨1上。再例如,当所述全方向盘手托2在所述滑轨1上自由滑动时,驾驶人员握持所述气动开关3增加所述气动开关3内的气体压力触发所述锁死机构11,将所述全方向盘手托2锁死在所述滑轨1上。
45.本发明的可选实施例中,全方向盘手托2在滑轨1上自由滑动时,驾驶人员可以手扶全方向盘手托2却不控制自动驾驶车辆,遇到紧急情况,驾驶人员用力握紧气动开关3的气囊,改变气囊内气体压力,触发锁死机构11的开关将全方向盘手托2固定或锁死在滑轨1上,驾驶人员可以通过全方向盘手托2控制自动驾驶车辆。克服相关技术中长时间驾驶自动驾驶车辆,驾驶人员手握着自动驾驶车辆方向盘w,却不能给驾驶人员的手臂提供支撑力的缺陷,本发明提供的自动驾驶车辆方向盘辅助设备可以在驾驶人员不操控自动驾驶车辆时,全方向盘手托2给驾驶人员的手臂提供支撑力,可以有效避免驾驶人员长期驾驶自动驾
驶车辆对驾驶人员的身体造成损害,在实现驾驶人员安全驾驶自动驾驶车辆的同时,满足法律法规的强制性规定。
46.下面结合图2~图8对图1所示的自动驾驶车辆方向盘辅助设备作进一步说明。
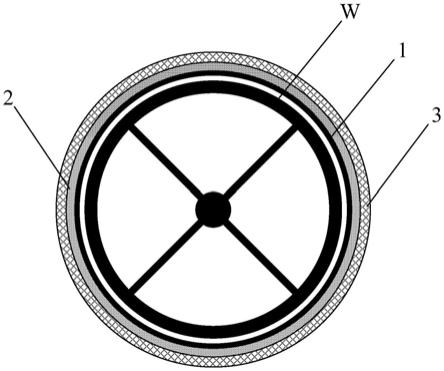
47.图2为本发明具体实施方式提供的一种滑轨的结构示意图。
48.本发明的可选实施例中,如图2所示,所述滑轨1还可以包括轨道12和卡扣辅助室13。
49.具体地,轨道12固定设置在自动驾驶车辆方向盘w上。卡扣辅助室13设置在所述轨道12上,卡扣辅助室13用于存放所述锁死机构11。
50.本发明的可选实施例中,轨道12可以粘在自动驾驶车辆方向盘w上,也可以卡在自动驾驶车辆方向盘w上,也可以像方向盘套似的套在自动驾驶车辆方向盘w上。滑轨2的材质可以为金属、非金属、塑料、橡胶、陶瓷等,也可以为上述材质的组合,本发明不以此为限。卡扣辅助室13可以焊接在轨道12上,也可以通过螺栓固定在轨道12上,卡扣辅助室13也可以与轨道12一体成形。卡扣辅助室13可以为内部中空的正方体、长方体或圆柱体等。
51.本发明的可选实施例中,锁死机构11设置在卡扣辅助室13中,卡扣辅助室13设置在轨道12上。锁死机构11一旦固定或锁死全方向盘手托2,则驾驶人员可以通过全方向盘手托2控制自动驾驶车辆。
52.图3为本发明具体实施方式提供的一种全方向盘手托的结构示意图。
53.本发明的可选实施例中,如图3所示,全方向盘手托2可以包括滑槽21和支撑部位22。
54.具体地,滑槽21与所述轨道12滑动配合,在所述滑槽21上沿圆周方向开设有多个凹槽211,所述锁死机构11的凸起111抵扣在至少一个凹槽211内,将所述全方向盘手托2锁死在所述滑轨1上。支撑部位22设置在所述滑槽21上,支撑部位22用于支撑驾驶人员手臂。其中,所述支撑部位22可以与所述自动驾车辆方向盘w不接触,也可以与所述自动驾车辆方向盘w接触。
55.本发明的可选实施例中,凹槽211也可以是通孔,凹槽211可以均匀分布在轨道12上,凹槽211的形状可以是圆形、方形、多边形、椭圆形等。锁死机构11的凸起111运动时抵扣在最近的一个凹槽211内,或者抵扣在最近的两个凹槽211内(凸起111具有两个分叉头,分别抵扣在一个凹槽211内),或者抵扣在最近的多个凹槽211内(凸起111具有多个分叉头,分别抵扣在一个凹槽211内),全方向盘手托2锁死在滑轨1上。支撑部位22与自动驾车辆方向盘w接触时,支撑部位22可以通过钢珠、钢柱等球状体或柱状体连接,支撑部位22可以在自动驾车辆方向盘w上自由滑动。
56.本发明的可选实施例中,可以在驾驶人员不操控自动驾驶车辆时,全方向盘手托2给驾驶人员的手臂提供支撑力,即驾驶人员握着自动驾驶车辆方向盘w却不操控自动驾驶车辆时,手臂不会处于架空状态,驾驶人员的手臂和肩膀不会感觉到疲惫和劳力,可以有效避免驾驶人员长期驾驶自动驾驶车辆时,手臂长时间架空对驾驶人员的身体造成损害。遇到紧急情况,全方向盘手托2锁死在滑轨1上,驾驶人员可以人工操控自动驾驶车辆,在实现驾驶人员安全驾驶自动驾驶车辆的同时,满足法律法规的强制性规定。
57.图4为本发明具体实施方式提供的一种锁死机构的结构示意图。
58.本发明的可选实施例中,如图4所示,所述锁死机构11还可以包括:电磁铁112、弹
性件113和第一电磁铁电源开关114。
59.具体地,电磁铁112设置在所述卡扣辅助室13上,其中,所述电磁铁112通电时具有磁性,所述电磁铁112断电时不具有磁性。弹性件113设置在所述电磁铁112上,弹性件113用于支撑所述凸起111,其中,所述电磁铁112通电时,所述电磁铁112对所述凸起111的引力克服所述弹性件113的弹力,所述凸起111远离所述凹槽211,所述全方向盘手托2在所述滑轨1上自由滑动,所述电磁铁112断电时,所述电磁铁112不再吸引所述凸起111,所述凸起111在所述弹性件113弹力作用下抵入所述凹槽211内,所述全方向盘手托2锁死在所述滑轨1上。第一电磁铁电源开关114设置在所述卡扣辅助室13内,第一电磁铁电源开关114用于开关所述电磁铁112的供电。
60.本发明的可选实施例中,凸起111与电磁铁112之间可以通过套筒式伸缩器连接,套筒式伸缩器可以保持凸起111和电磁铁112沿同一轴线靠近或远离运动,可以保证凸起111精准抵入所述凹槽211内,进一步提高自动驾驶车辆方向盘辅助设备的可靠性。同时弹性件113可以仅提供弹力,不用固定连接凸起111和电磁铁112。
61.本发明的可选实施例中,弹性件113可以是弹簧、弹片等。凸起111的开状与凹槽211的形状相适配,例如凸起111可以是圆锥体金属块或圆柱体金属块或立方体金属块等。电磁铁112断电时,电磁铁112不再吸引凸起111,凸起111在弹性件113弹力作用下抵入最近的至少一个凹槽211内(如果凸起111没有分叉且位于两个凹槽211之间,凸起111在弹性件113弹力作用下,必然抵入两个凹槽211中的一个凹槽211内,根据自动驾驶车辆方向盘w的旋转方向不同,凸起111在弹性件113弹力的作用下也可能抵入次最近的凹槽211内),所述全方向盘手托2锁死在所述滑轨1上,驾驶人员可以人工操控自动驾驶车辆。
62.图5为本发明具体实施方式提供的一种气动开关的结构示意图。
63.本发明的可选实施例中,如图5所示,所述气动开关3可以包括气囊31和气囊开关32。
64.具体地,气囊31固定设置在自动驾驶车辆方向盘w上。气囊开关32设置在所述气囊31上,气囊开关32用于所述气囊31内气体的压力增加到预定值时按压所述第一电磁铁电源开关114停止给所述电磁铁112供电,所述电磁铁112不再吸引所述凸起111,所述凸起111在所述弹性件113弹力作用下抵入所述凹槽211内,所述全方向盘手托2锁死在所述滑轨1上。
65.本发明的可选实施例中,气囊31内气体的压力增加到预定值时,气囊开关32按压第一电磁铁电源开关114,电磁铁112断电,电磁铁112不再吸引凸起111,凸起111在弹性件113弹力作用下抵入最近或次最近的凹槽211内,全方向盘手托2锁死在滑轨1上,驾驶人员可以人工操控自动驾驶车辆。气囊31呈圆形,整体覆盖在自动驾驶车辆方向盘w上。气囊开关32可以由压力传感器及电子套筒组成,电子套筒可以在微型司服电机的带动下,做伸缩运动,例如,压力传感器检测到气囊31内气体压力达到第一预定值时,微型司服电机的驱动电子套筒伸长,按压第一电磁铁电源开关114,压力传感器检测到气囊31内气体压力小于第二预定值时,微型司服电机的驱动电子套筒收缩,不再按压第一电磁铁电源开关114。气囊31可以粘贴在自动驾驶车辆方向盘w上,也可以通过止挡件固定在自动驾驶车辆方向盘w上。气囊31可以由内部中空的橡胶制成,也可以由具有弹性的化学聚合物制成。第一电磁铁电源开关114处于常闭状态,被按压后,第一电磁铁电源开关114变换为断开状态,电磁铁112断电,即使再次按压第一电磁铁电源开关114,第一电磁铁电源开关114也不会变换为闭
合状态,必须通过人工对第一电磁铁电源开关114进行重置,第一电磁铁电源开关114才能处于常闭状态,电磁铁112通电。
66.本发明的可选实施例中,根据第一电磁铁电源开关114被按压的情况(例如利用压力传感器获得第一电磁铁电源开关114被按压的情况),可以利用计算机程序或者计算机可读存储介质控制第一电磁铁电源开关114的通断。例如,第一电磁铁电源开关114处于常闭状态,如果按压第一电磁铁电源开关114的时间超过3秒,第一电磁铁电源开关114变换为断开状态,电磁铁112断电,即使再次按压第一电磁铁电源开关114,第一电磁铁电源开关114也不会变换为闭合状态,必须通过其他方式对第一电磁铁电源开关114进行重置;如果按压第一电磁铁电源开关114的时间未超过3秒,按压第一电磁铁电源开关114时,第一电磁铁电源开关114变换为断开状态,电磁铁112断电,停止按压第一电磁铁电源开关114后,第一电磁铁电源开关114变换为闭合状态。再例如,第一电磁铁电源开关114处于常闭状态,如果按压第一电磁铁电源开关114,第一电磁铁电源开关114变换为断开状态,电磁铁112断电;如果未按压第一电磁铁电源开关114的时间超过15秒,第一电磁铁电源开关114自动变换为闭合状态。再例如,第一电磁铁电源开关114处于常闭状态,如果按压第一电磁铁电源开关114的时间超过3秒,第一电磁铁电源开关114变换为断开状态,电磁铁112断电;如果2秒内再连续按压第一电磁铁电源开关114二次,则第一电磁铁电源开关114变换为闭合状态。再例如,第一电磁铁电源开关114处于常闭状态,如果按压第一电磁铁电源开关114,第一电磁铁电源开关114变换为断开状态,电磁铁112断电;如果2秒内再连续按压第一电磁铁电源开关114二次,则第一电磁铁电源开关114变换为闭合状态。
67.图6为本发明另一具体实施方式提供的一种锁死机构的结构示意图。
68.本发明的可选实施例中,如图6所示,所述锁死机构11还可以包括:第二电磁铁电源开关115、手动拨片116和楔形件117。
69.具体地,第二电磁铁电源开关115设置在所述卡扣辅助室13内,第二电磁铁电源开关115用于开关所述电磁铁112的供电。手动拨片116设置在所述卡扣辅助室13的通槽131内,其中,所述手动拨片116位于第一位置p1时,所述第二电磁铁电源开关115闭合,所述第一电磁铁电源开关114控制所述电磁铁112的供电。楔形件117设置在所述手动拨片116上,其中,所述手动拨片116位于第二位置p2时,所述第二电磁铁电源开关115断开,所述电磁铁112断电,所述楔形件117克服所述弹性件113的弹力按压所述凸起111的横杆1111,所述凸起111远离所述凹槽211,所述全方向盘手托2在所述滑轨1上自由滑动。所述手动拨片116位于第三位置p3时,所述第二电磁铁电源开关115断开,所述电磁铁112断电,所述楔形件117释放所述凸起111的横杆1111,所述凸起111在所述弹性件113弹力的作用下抵入所述凹槽211内,所述全方向盘手托2锁死在所述滑轨1上。
70.本发明的可选实施例中,手动拨片116位于第二位置p2或第三位置p3时,电磁铁112均断电,电磁铁112不再吸引凸起111,凸起111是否抵入凹槽211内,完全由弹性件113的弹力及楔形件117的压力决定。拨动手动拨片116,当手动拨片116位于第一位置p1时,手动拨片116按压第二电磁铁电源开关115,第二电磁铁电源开关115闭合,由第一电磁铁电源开关114控制电磁铁112的供电;拨动手动拨片116,当手动拨片116位于第二位置p2或第三位置p3时,手动拨片116释放第二电磁铁电源开关115,第二电磁铁电源开关115断开,第一电磁铁电源开关114不能控制电磁铁112的供电,电磁铁112始终处于断电状态。
71.本发明的可选实施例中,所述手动拨片116位于所述第一位置p1时,所述手动拨片116位于所述通槽131的中部,所述手动拨片116位于所述第二位置p2时,所述手动拨片116位于所述通槽131的上部,所述手动拨片116位于所述第三位置p3时,所述手动拨片116位于所述通槽131的下部。手动拨片116的材质可以为塑料、陶瓷等绝缘材料,也可以在手动拨片116外大套设塑料、陶瓷等绝缘材料,防止静电影响驾驶人员正常操作手动拨片116。
72.本发明的可选实施例中,可以手动控制全方向盘手托2是在滑轨1上自由滑动,还是锁死在滑轨1上,防止气动开关3或锁死机构11故障时,无法有效操作自动驾驶车辆方向盘辅助设备的问题,驾驶人员可以将手动拨片116拨到第二位置p2,全方向盘手托2在滑轨1上自由滑动,不操控自动驾驶车辆,让全方向盘手托2给驾驶人员的手臂提供支撑力,有效避免驾驶人员长期驾驶自动驾驶车辆对驾驶人员的身体造成损害。驾驶人员还可以将手动拨片116拨到第三位置p3,全方向盘手托2锁死在滑轨1上,驾驶人员可以人工驾驶车辆,在实现驾驶人员安全驾驶自动驾驶车辆的同时,满足法律法规的强制性规定。
73.图7为本发明具体实施方式提供的一种锁死机构抵挡片的结构示意图。
74.本发明的可选实施例中,如图7所示,所述锁死机构11还可以包括第一抵挡片118和第二抵挡片119。
75.具体地,第一抵挡片118套设在所述手动拨片116上,所述第一抵挡片118位于所述卡扣辅助室13内。第二抵挡片119套设在所述手动拨片116上,所述第二抵挡片119位于所述卡扣辅助室13外,其中,所述第一抵挡片118和所述第二抵挡片119夹着所述通槽131两边侧壁,保持所述手动拨片116在所述凹槽211内沿直线移动。
76.本发明的可选实施例中,第一抵挡片118和第二抵挡片119将手动拨片116卡在凹槽211内,手动拨片116不能在水平方向移动,在第一抵挡片118和第二抵挡片119的作用下,手动拨片116在凹槽211内沿直线上下移动,保持楔形件117和横杆1111在垂直方向的相对位置不会改变,提高人工操作手动拨片116的控制精度。
77.图8为本发明具体实施方式提供的一种自动驾驶车辆方向盘辅助设备的爆炸图。
78.本发明的可选实施例中,如图8所示,所述轨道12上开设有通孔121,所述凸起111穿过所述通孔121抵扣在至少一个凹槽211内,将所述全方向盘手托2锁死在所述滑轨1上。所述凸起111的长度大于轨道12的厚度及凹槽211深度之和。
79.本发明的可选实施例中,凸起111穿过通孔121抵扣在至少一个凹槽211内,通孔121内的凸起111可以有效阻止凸起111随全方向盘手托2运动,可以增加全方向盘手托2锁死在滑轨1上的力,全方向盘手托2锁死在滑轨1上,驾驶人员可以通过全方向盘手托2人工操控自动驾驶车辆方向盘w,全方向盘手托2不会在滑轨1上滑动,在有效避免驾驶人员长期驾驶自动驾驶车辆对驾驶人员的身体造成损害的同时,实现自动驾驶车辆的安全驾驶,满足法律法规的强制性规定。
80.本发明的可选实施例中,锁死机构11还可以包括用于给电磁铁112供电的电源。电源的电可以来自自动驾驶车辆,也可以来自独立的干电池、充电电池等。
81.上述的本发明实施例可在各种硬件、软件编码或两者组合中进行实施。例如,本发明的实施例也可为在数据信号处理器(digital signal processor,dsp)中执行上述方法的程序代码。本发明也可涉及计算机处理器、数字信号处理器、微处理器或现场可编程门阵列(field programmable gate array,fpga)执行的多种功能。可根据本发明配置上述处理
器执行特定任务,其通过执行定义了本发明揭示的特定方法的机器可读软件代码或固件代码来完成。可将软件代码或固件代码发展为不同的程序语言与不同的格式或形式。也可为不同的目标平台编译软件代码。然而,根据本发明执行任务的软件代码与其他类型配置代码的不同代码样式、类型与语言不脱离本发明的精神与范围。
82.本领域技术人员可以理解,本发明的各个实施例和/或权利要求中记载的特征可以进行多种组合或/或结合,即使这样的组合或结合没有明确记载于本发明中。特别地,在不脱离本发明精神和教导的情况下,本发明的各个实施例和/或权利要求中记载的特征可以进行多种组合和/或结合。所有这些组合和/或结合均落入本发明的范围。
83.以上对本发明的实施例进行了描述。但是,这些实施例仅仅是为了说明的目的,而并非为了限制本发明的范围。尽管在以上分别描述了各实施例,但是这并不意味着各个实施例中的措施不能有利地结合使用。本发明的范围由所附权利要求及其等同物限定。不脱离本发明的范围,本领域技术人员可以做出多种替代和修改,这些替代和修改都应落在本发明的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。