1.本实用新型涉及焊接装置技术领域,特别涉及一种用于顶盖焊接的半自动装置。
背景技术:
2.如图1所示为顶盖的结构爆炸图,顶盖10由圆环盘101与圆锥台的管状段102组成;顶盖10焊接时,需要将管状段102与圆环盘101相对并密封焊接。现有技术对圆环盘101与管状段102焊接时,是先通过人工定位的方式对圆环盘101与管状段102进行多点电焊使圆环盘101与管状段102固定,然后,操作人员绕管状段102转动进行密封焊接,使得圆环盘101与管状段102的连接处(焊缝)密封焊接,完成顶盖10的焊接操作。
3.由于现有技术中对顶盖焊接为手动焊接,在对点焊后的管状段与圆环盘段进行转动密封焊接时,由于操作人员需要一边沿管状段转动一边还需手拿焊枪与焊条对焊缝出进行密封焊接,导致圆环盘与管状段的焊接出的质量均衡性不好,影响成批顶盖的质量,不利于后续加工处理。
技术实现要素:
4.针对现有技术中所存在的不足,本实用新型提供了一种用于顶盖焊接的半自动装置,解决了现有技术中纯人工操作对不同顶盖的焊接质量存在差异性较大、成批顶盖质量不均衡的问题。
5.为实现上述目的,本实用新型采用了如下的技术方案:一种用于顶盖焊接的半自动装置,包括机架、机架上转动设置的转动座及与机架固定的支撑架,
6.所述转动座上设有用于夹持圆环盘的三爪卡盘,
7.所述支撑架包括用于固定焊枪的放置套及与放置套连接的三向位置调节机构,所述三向位置调节机构用于调节放置套与三爪卡盘的相对位置使焊枪位于预设位置。
8.本实用新型的原理:先将圆环盘与管状段点焊固定,然后将圆环盘通过三爪卡盘进行固定,再将焊枪固定在放置套内,通过三向位置调节机构调节位置使焊枪的喷口与圆环盘和管状段的焊缝位置匹配,然后是转动座转动带动三爪卡盘转动,三爪卡盘转动带动圆环盘与管状段缓慢转动,焊枪工作对焊缝出进行密封焊接。
9.相比于现有技术,本实用新型具有如下有益效果:本实用新型设置的半自动装置能使圆环盘与管状段进行密封焊接时,圆环盘、管状段的转动是匀速转动,同时焊枪的位置基本不变,进而能确保不同圆环盘与对应的管状段密封焊接时的质量基本一致,减少不同顶盖焊接装配时的质量差异,使成批生产的顶盖质量均衡性更好,更有利于顶盖的后续处理。
附图说明
10.图1为现有技术中顶盖的结构爆炸图;
11.图2为本实用新型未设置固定杆、放置套的结构侧视图;
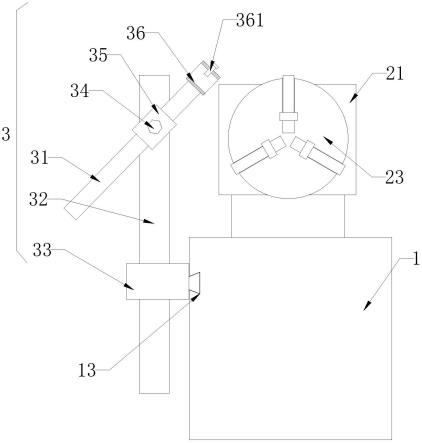
12.图3为本实用新型的结构主视图;
13.图4为本实用新型滑动座与升降杆的连接结构图。
14.图中:1、机架;11、固定座;12、推杆;13、滑动槽;2、转动座;21、伺服电机;22、转动轴;23、三爪卡盘;3、支撑架;31、固定杆;32、升降杆;33、滑动座;34、锁紧螺杆;35、连接套;36、放置套;37、楔块;38、伸缩弹簧;39、限位槽;310、作用块;321、楔形槽;331、安装通孔;361、锁紧螺栓。
具体实施方式
15.下面结合附图及实施例对本实用新型中的技术方案进一步说明。
16.如图2、3所示,本实用新型实施例提出了一种用于顶盖焊接的半自动装置,包括机架1、机架1上转动设置的转动座2及与机架1固定的支撑架3。本实用新型设置的机架1是为了便于转动座2与支撑架3的安装,机架1的结构不做限制。设置转动座2是为了将人工绕圆环盘转动的方式改变为圆环盘在密封焊接时自主转动;支撑架3主要用于限定焊枪的位置,使得圆环盘与管状段的密封焊接过程能通过该半自动装置替代,避免人工手持焊枪的转动焊接过程,进而使整个焊接过程的质量更易控制。
17.如图2、3所示,具体的,所述转动座2包括水平设置的转动轴22及驱动转动轴22转动的伺服电机21,伺服电机21可以控制转动轴22的转速速率,更有利于基础焊接需求设定转动轴22的转速。同时本实用新型设置的伺服电机21还可通过其他驱动机构替代,能确保转动轴22的转速可控即可。转动座2的设置是为了将现有的人工沿圆环盘(管状段)转动焊接的方式变换为圆环盘(管状段)转动的方式,因此,为使圆环盘能与转动轴22固定,在转动轴22固定有用于夹持圆环盘的三爪卡盘23,三爪卡盘23与转动轴22同轴固定。使用时,只需将点焊后的圆环盘(连接有管状段的圆环盘)通过三爪卡盘23固定,则转动轴22转动就能带动圆环盘(管状段)转动,避免人工绕圆环盘转动,使得转动过程更加稳固可靠。
18.支撑架3的作用主要用于确保圆环盘转动过程中焊枪与圆环盘(焊缝)的相对位置不变,具体的,所述支撑架3包括用于固定焊枪的放置套36及与放置套36连接的三向位置调节机构,所述三向位置调节机构用于调节放置套36与三爪卡盘23的相对位置使焊枪位于预设位置。三向位置调节机构用于改变放置套36在x、y、z三个方向上的位置变化,使焊枪的位置能与焊缝位置相匹配。
19.如图2、3、4所示,具体的,所述调节机构包括沿平行转动轴22长度方向与机架1滑动连接的滑动座33、沿滑动座33竖直滑动连接的升降杆32及沿升降杆32交叉滑动连接且沿靠近和远离三爪卡盘23方向设置的固定杆31,所述放置套36与固定杆31固定连接。所述滑动座33通过位移组件驱动沿转动轴22长度方向滑动,所述位移组件包括机架1上固定的固定座11、固定座11上贯穿且螺纹连接的推杆12及与滑动座33滑动连接的滑动槽13,所述推杆12与转动轴22长度平行且与滑动座33转动连接。推杆12与固定座11的配合能对推杆12进行位置限定,在没有外力转动推杆12的情况下,推杆12与滑动座33均不会沿机架1移动;而需要调节滑动座33位置时,只需转动推杆12,就能带动滑动座33沿平行转动轴22长度方向移动,使升降杆32的位置靠近焊缝,再进一步调节升降杆32的高度和固定杆31的位置,使放置套36的位置能与焊缝基本处于一个平面,进而使焊枪插接放置在放置套36内的位置也能与焊缝基本位于一个平面。
20.如图2、4所示,调节好滑动座33的位置后,还是调节升降杆32的位置,本实用新型的升降杆32贯穿滑动座33上的安装通孔331并与滑动座33之间设有移动控制组件,所述移动控制组件包括沿升降杆32长度方向均布设置的多个楔形槽321及与任意楔形槽321均可插接配合的楔块37,所述楔块37的斜面向下设置,所述楔块37与滑动座33上开设的限位槽39滑动连接,所述限位滑槽与安装通孔331相通设置,所述楔块37与限位槽39之间设有伸缩弹簧38。如图2、4所示,移动控制组件能使升降杆32单向移动(向上移动)使得升降杆32的上移更加便捷。为了使升降杆32能下移,所述限位槽39设有与外界相通的开口,在所述楔块37上设有作用块310,外力作用在作用块310上可带动楔块37朝向远离升降杆32方向移动与对应的楔形槽321分离。移动时,操作人员一手固定升降杆32,另一只手移动作用块310使楔块37与楔形槽321分离,则升降杆32可以在重力的作用下下移,下移至预设位置后,松开作用块310的外力,楔块37朝向升降杆32滑动并进入对应的楔形槽321内,使升降杆32与滑动座33锁紧,外力消失后升降杆32也不会在重力的作用下继续下移。
21.如图3所示,滑动座33沿转动轴22长度方向的移动相当于对放置套36进行x向的调节,升降杆32的升降相当于对放置套36的z向进行调节,则固定杆31的移动则需要对放置套36的y向进行调节。具体的,所述升降杆32上固定有连接套35,所述连接套35的轴线与升降杆32长度方向呈夹角设置,所述固定杆31贯穿连接套35并通过贯穿连接套35侧壁与连接套35螺纹连接的锁紧螺杆34与连接套35固定。连接套35的轴线可水平设置,使固定杆31沿连接套35滑动时能带动放置套36靠近或远离三爪卡盘23移动,实现放置套36在y向的移动,也可将连接套35的轴线与升降杆32呈锐角设置,使得固定杆31沿连接套35移动时,放置套36沿斜向靠近或远离三爪卡盘23,使得焊枪的位置能位于较为适宜的斜上方位置(图示3中),便于观察密封焊接过程。
22.为方便焊枪与放置套36的固定,可以在放置套36上设置一个锁紧螺栓361,用于将放置在放置套36内的焊枪与放置套36锁紧。
23.本实用新型设置的半自动装置能使圆环盘与管状段进行密封焊接时,圆环盘、管状段的转动是匀速转动,同时焊枪的位置基本不变,进而能确保不同圆环盘与对应的管状段密封焊接时的质量基本一致,减少不同顶盖焊接装配时的质量差异,使成批生产的顶盖质量均衡性更好,更有利于顶盖的后续处理。
24.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
