基于载波相位差分辅助的gnss定位方法及导航方法
技术领域
1.本发明属于导航技术领域,具体涉及一种基于载波相位差分辅助的gnss定位方法及导航方法。
背景技术:
2.随着经济技术的发展和人们生活水平的提高,导航技术已经广泛应用于人们的生产和生活当中,给人们的生产和生活带来了无尽的便利。因此,保障导航过程的精确性,就成为了导航系统最重要的任务之一。
3.在导航过程中,为了使得gnss(global navigation satellite system,全球导航卫星系统)的定位结果更加精确、可靠及定位结果更加平滑,一般采用kalman滤波(卡尔曼滤波)估计方法。在传统的基于kalman滤波估计的gnss定位方法中,对应的动力学模型一般为常速度或常加速度模型:常速度模型一般表示为,其中vx为为kalman滤波的新息残差,xk为kalman滤波器中的时刻k的状态量,为kalman滤波器中时刻k的预测量,为kalman滤波器中时刻k-1的状态量导数,为时刻k与时刻k-1的时间差;而且当状态量x
k-1
为位置时,导数即为速度值;常加速度模型一般表示为,其中为kalman滤波器中时刻k-1的状态量的二次导数;而且当状态量x
k-1
为位置时,导数即为速度值,二次导数即为加速度值。
4.但是,由于在gnss定位的实际应用场景中存在各种各样的运动方式,导致采用常速度或者常加速度模型的动力学模型与实际运动状态不符合;而且,当gnss定位更新频率低,的预测量精度更低。严重时将导致预测量失真,从而使kalman滤波器发散,gnss定位不可用。毫无疑问,这种情况将严重影响导航系统的导航性能。
技术实现要素:
5.本发明的目的之一在于提供一种适用范围广、可靠性高且精确性好的基于载波相位差分辅助的gnss定位方法。
6.本发明的目的之二在于提供一种包括了所述基于载波相位差分辅助的gnss定位方法的导航方法。
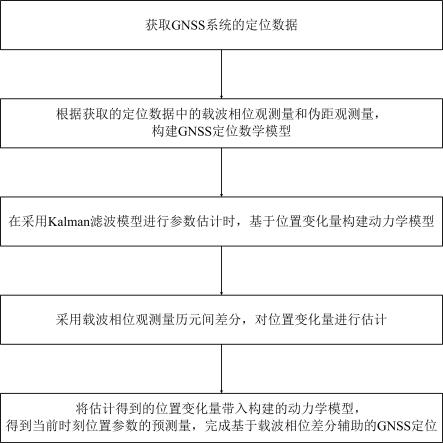
7.本发明提供的这种基于载波相位差分辅助的gnss定位方法,包括如下步骤:s1. 获取gnss系统的定位数据;s2. 根据获取的定位数据中的载波相位观测量和伪距观测量,构建gnss定位数学模型;s3. 在采用kalman滤波模型进行参数估计时,基于位置变化量构建动力学模型;s4. 采用载波相位观测量历元间差分,对位置变化量进行估计;s5. 将步骤s4估计得到的位置变化量带入步骤s3构建的动力学模型,得到当前时刻位置参数的预测量,完成基于载波相位差分辅助的gnss定位。
8.所述的步骤s2,具体包括如下步骤:构建的gnss定位数学模型为:构建的gnss定位数学模型为:式中为gnss定位的载波相位和伪距函数模型,为gnss定位的随机模型;下标表示为载波相位观测量,下标p表示伪距观测量;为载波相位观测值;a为实数参数的系数矩阵;a为位置参数和其他实数参数的状态向量;b为模糊度的系数,且为对应波长组成的对角矩阵;b为m维模糊度参数向量;为载波相位观测误差;y
p
为伪距观测值;e
p
为伪距观测误差;d(y)为观测值的方差矩阵;为先验标准差;qy为协因数矩阵。
9.所述的步骤s3,具体包括如下步骤:构建的动力学模型为:式中va为位置参数的预测残差;ak为k时刻的位置参数的状态量;为k时刻的位置参数的预测量;da为k-1时刻到k时刻的位置变化量。
10.所述的步骤s4,具体为首先根据载波相位观测方程计算得到历元间的差值,再采用最小二乘法对历元间的差值进行估计,从而估算得到精确的位置变化量的值。
11.所述的步骤s4,具体包括如下步骤:
a. 采用载波相位观测方程,计算历元间的差值,得到:式中为k时刻与k-1时刻的gnss载波相位历元间的差分值;a为实数参数的系数矩阵;da为k-1时刻到k时刻的位置变化量;b为模糊度的系数,且为对应波长组成的对角矩阵;db为周跳值;为历元间差分载波相位量的噪声;b. 当k-1时刻与k时刻的gnss载波相位没有发生周跳时,则周跳值db为0;此时历元间的差值计算式为;c. 对步骤b得到的历元间的差值计算式,采用最小二乘法进行估算,得到k-1时刻到k时刻的位置变化量da的计算式为:式中为历元间差分载波相位量噪声的方差矩阵;为k时刻与k-1时刻的gnss载波相位历元间的差分值。
12.本发明还公开了一种包括了所述基于载波相位差分辅助的gnss定位方法的导航方法,具体包括如下步骤:a. 实时获取gnss系统的定位数据;b. 采用所述的基于载波相位差分辅助的gnss定位方法进行实时定位;c. 根据步骤b的实时定位结果,实时进行导航。
13.本发明提供的这种基于载波相位差分辅助的gnss定位方法及导航方法,能够精确估计gnss定位前后两个历元的位置变化量,能够解决kalman滤波器的动力学模型不准确的问题,同时能够精确的确定gnss观测量的方差及剔除粗差,从而可以提供更加精确,可靠的gnss定位结果,适合各种应用场景,而且适用范围广、可靠性高且精确性好。
附图说明
14.图1为本发明的定位方法的方法流程示意图。
15.图2为本发明的导航方法的方法流程示意图。
具体实施方式
16.如图1所示为本发明的定位方法的方法流程示意图:本发明提供的这种基于载波相位差分辅助的gnss定位方法,包括如下步骤:s1. 获取gnss系统的定位数据;s2. 根据获取的定位数据中的载波相位观测量和伪距观测量,构建gnss定位数学模型;具体包括如下步骤:构建的gnss定位数学模型为:
式中为gnss定位的载波相位和伪距函数模型,为gnss定位的随机模型;下标表示为载波相位观测量,下标p表示伪距观测量;为载波相位观测值;a为实数参数的系数矩阵;a为位置参数和其他实数参数的状态向量;b为模糊度的系数,且为对应波长组成的对角矩阵;b为m维模糊度参数向量;为载波相位观测误差;y
p
为伪距观测值;e
p
为伪距观测误差;d(y)为观测值的方差矩阵;为先验标准差;qy为协因数矩阵;s3. 在采用kalman滤波模型进行参数估计时,基于位置变化量构建动力学模型;具体包括如下步骤:构建的动力学模型为:式中va为位置参数的预测残差;ak为k时刻的位置参数的状态量;为k时刻的位置参数的预测量;da为k-1时刻到k时刻的位置变化量;为了使k时刻的位置参数的预测量更加精确,则必须准确的估计出da值;因此可以采用载波相位历元差分精确的估计出位置变化量;s4. 采用载波相位观测量历元间差分,对位置变化量进行估计;具体为首先根据载波相位观测方程计算得到历元间的差值,再采用最小二乘法对历元间的差值进行估计,从而估算得到精确的位置变化量的值;具体实施时,包括如下步骤:a. 采用载波相位观测方程,计算历元间的差值,得到:式中为k时刻与k-1时刻的gnss载波相位历元间的差分值;a为实数参数的系数矩阵;da为k-1时刻到k时刻的位置变化量;b为模糊度的系数,且为对应波长组成的对角矩阵;db为周跳值;为历元间差分载波相位量的噪声;b. 当k-1时刻与k时刻的gnss载波相位没有发生周跳时(这种情况非常普遍),则周跳值db为0;此时历元间的差值计算式为;c. 对步骤b得到的历元间的差值计算式,采用最小二乘法进行估算,得到k-1时刻到k时刻的位置变化量da的计算式为:
式中为历元间差分载波相位量噪声的方差矩阵;为k时刻与k-1时刻的gnss载波相位历元间的差分值;本步骤中,由于gnss载波相位观测的精度可以达到0.003m,因此能够精确估计出k-1到k时刻的位置变化量db;s5. 将步骤s4估计得到的位置变化量db带入步骤s3构建的动力学模型,得到当前时刻位置参数的预测量,完成基于载波相位差分的gnss定位;从而解决kalman滤波器的动力学模型不准确的问题。
17.在获取精确的位置参数的预测量后,通过新息检测,即可准确的剔除观测量的粗差。从而gnss定位结果更加精确,可靠的。
18.如图2所示为本发明的导航方法的方法流程示意图:本发明提供的这种包括了所述基于载波相位差分辅助的gnss定位方法的导航方法,具体包括如下步骤:a. 实时获取gnss系统的定位数据;b. 采用所述的基于载波相位差分辅助的gnss定位方法进行实时定位;c. 根据步骤b的实时定位结果,实时进行导航。
19.为了验证本发明的有效性,使用无人机采集了一组gnss动态数据,对该组数据使用本发明和常用方法进行单点定位后处理,对单点定位结果进行统计如表1所示。
20.表1 本发明与其他常用方法的单点定位误差统计示意表通过表1的单点定位误差的统计值可以看到,本发明的定位精度要优于其他常规方法。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。