技术特征:
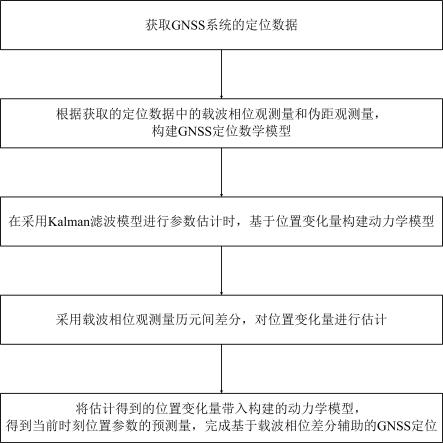
1.一种基于载波相位差分辅助的gnss定位方法,其特征在于包括如下步骤:s1. 获取gnss系统的定位数据;s2. 根据获取的定位数据中的载波相位观测量和伪距观测量,构建gnss定位数学模型;s3. 在采用kalman滤波模型进行参数估计时,基于位置变化量构建动力学模型;s4. 采用载波相位观测量历元间差分,对位置变化量进行估计;具体为首先根据载波相位观测方程计算得到历元间的差值,再采用最小二乘法对历元间的差值进行估计,从而估算得到精确的位置变化量的值;s5. 将步骤s4估计得到的位置变化量带入步骤s3构建的动力学模型,得到当前时刻位置参数的预测量,完成基于载波相位差分辅助的gnss定位。2.根据权利要求1所述的基于载波相位差分辅助的gnss定位方法,其特征在于所述的步骤s2,具体包括如下步骤:构建的gnss定位数学模型为:构建的gnss定位数学模型为:式中为gnss定位的载波相位和伪距函数模型,为gnss定位的随机模型;下标表示为载波相位观测量,下标p表示伪距观测量;为载波相位观测值;a为实数参数的系数矩阵;a为位置参数和其他实数参数的状态向量;b为模糊度的系数,且为对应波长组成的对角矩阵;b为m维模糊度参数向量;为载波相位观测误差;y
p
为伪距观测值;e
p
为伪距观测误差;d(y)为观测值的方差矩阵;为先验标准差;q
y
为协因数矩阵。3.根据权利要求2所述的基于载波相位差分辅助的gnss定位方法,其特征在于所述的步骤s3,具体包括如下步骤:构建的动力学模型为:式中va为位置参数的预测残差;a
k
为k时刻的位置参数的状态量;为k时刻的位置参数的预测量;da为k-1时刻到k时刻的位置变化量。4.根据权利要求3所述的基于载波相位差分辅助的gnss定位方法,其特征在于所述的步骤s4,具体包括如下步骤:
a. 采用载波相位观测方程,计算历元间的差值,得到:式中为k时刻与k-1时刻的gnss载波相位历元间的差分值;a为实数参数的系数矩阵;da为k-1时刻到k时刻的位置变化量;b为模糊度的系数,且为对应波长组成的对角矩阵;db为周跳值;为历元间差分载波相位量的噪声;b. 当k-1时刻与k时刻的gnss载波相位没有发生周跳时,则周跳值db为0;此时历元间的差值计算式为;c. 对步骤b得到的历元间的差值计算式,采用最小二乘法进行估算,得到k-1时刻到k时刻的位置变化量da的计算式为:式中为历元间差分载波相位量噪声的方差矩阵;为k时刻与k-1时刻的gnss载波相位历元间的差分值。5.一种包括了权利要求1~4之一所述的基于载波相位差分辅助的gnss定位方法的导航方法,其特征在于具体包括如下步骤:a. 实时获取gnss系统的定位数据;b. 采用权利要求1~4之一所述的基于载波相位差分辅助的gnss定位方法进行实时定位;c. 根据步骤b的实时定位结果,实时进行导航。
技术总结
本发明公开了一种基于载波相位差分辅助的GNSS定位方法,包括获取GNSS系统的定位数据;构建GNSS定位数学模型;基于位置变化量构建动力学模型;采用载波历元差分对位置变化量进行估计;将位置变化量带入动力学模型得到当前时刻位置状态的预测量,完成基于载波相位差分辅助的GNSS定位。本发明还公开了一种包括所述基于载波相位差分辅助的GNSS定位方法的导航方法。本发明能够精确估计GNSS定位前后两个历元的位置变化量,能够解决Kalman滤波器的动力学模型不准确的问题,能够精确的确定GNSS观测量的方差及剔除粗差,因此本发明能够提供更加精确,可靠且适用范围广的GNSS定位结果。可靠且适用范围广的GNSS定位结果。可靠且适用范围广的GNSS定位结果。
技术研发人员:满小三 刘勇 何心怡 肖永平 林佳 李元
受保护的技术使用者:长沙金维信息技术有限公司
技术研发日:2022.08.17
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。