1.本实用新型涉及一种适用于多规格标牌贴标作业的棒材在线贴标装置,属于棒材贴标的技术领域。
背景技术:
2.目前,根据棒材精整线对下线成品棒材标识工艺的要求,需要对成品棒材进行端面信息标识牌黏贴作业。所贴标牌一般为圆形,一般包括40mm、90mm两种直径规格。40mm标牌一般包括轧制号、炉号、牌号、规格等信息,主要用于直径90mm以下棒材的贴标,90mm标牌一般包括轧制号、牌号、炉号、捆号、标准、重量、日期等信息,主要用于直径90mm以上棒材的贴标。
3.现有技术中,不同规格标牌的贴标对自动化贴标作业造成了极大的制约,因此,一般采用人工手动贴标,即人工手持贴标机对棒材端面进行贴标,由于棒材产量大且速度快,人工贴标效率较低下,工作强度大;并且人工贴标均为离线贴标,易造成标牌漏贴与错贴,以上情况均会引起棒材的质量异议,给现场的管理以及客户带来不便。
技术实现要素:
4.实用新型目的:针对上述问题,本实用新型的目的是提供一种适用于多规格标牌贴标作业的棒材在线贴标装置,从而支撑棒材贴标作业的自动化升级。
5.技术方案:一种适用于多规格标牌贴标作业的棒材在线贴标装置,包括工业机器人、贴标执行机构、工作台、多个安装板,所述工业机器人、工作台相邻设置;所述安装板一端分叉、另一端通过立柱固定在所述工作台上,多个所述安装板并排等高设置;所述贴标执行机构包括安装法兰、换枪盘公头、换枪盘母头、吸盘组件、缓冲垫,所述换枪盘公头通过所述安装法兰固定在所述工业机器人的活动端,所述换枪盘母头、吸盘组件、缓冲垫具有多个,每个所述换枪盘母头分别通过所述吸盘组件连接任一规格的所述缓冲垫;所述换枪盘母头、吸盘组件、缓冲垫连接形成的组件通过所述安装板的分叉卡入所述安装板;所述换枪盘公头在所述工业机器人的驱动下,到达任一所述安装板处,与所述换枪盘母头匹配安装,以通过不同规格的所述缓冲垫吸附不同规格的标牌。
6.本实用新型的原理是:在工作台上设置有多个安装板,每个安装板存放不同规格的缓冲垫,当需要选择其一进行贴标作业时,工业机器人驱动换枪盘公头到达该安装板处,与该安装板上的换枪盘母头进行装配,从而完成贴标执行机构的选配作业。而当需要进行另外规格的标牌贴标作业时,只需将原换枪盘母头重新放回该安装板上,再另外选择合适的缓冲垫所对应的换枪盘母头进行装配即可,方便快捷。
7.进一步,所述吸盘组件包括吸盘座、吸盘支架、吸盘本体,所述吸盘座固连所述换枪盘母头,所述吸盘支架连接所述吸盘座、吸盘本体,所述吸盘本体连接所述缓冲垫,所述吸盘本体上开设有第一气孔,所述第一气孔通过外部的真空发生装置抽气。
8.进一步,还包括定位销,所述定位销固定在所述安装板的上表面,所述吸盘座上开
设有定位孔,所述吸盘支架与所述安装板的分叉对位,所述定位孔与所述定位销对位,所述安装板的分叉夹设所述吸盘支架形成转动限位,所述定位销卡入所述定位孔形成水平限位。
9.进一步,还包括接近传感器,所述接近传感器固定在所述安装板的下表面,且与所述吸盘本体对位,以检测换枪盘母头、吸盘组件、缓冲垫连接形成的组件是否完成与安装板的固定。
10.进一步,所述安装板的分叉呈凸字形,包括位于内侧的窄口部以及位于外侧的宽口部,所述接近传感器位于所述宽口部侧方,所述定位销位于窄口部两侧。本结构中,在紧凑的结构下通过合理的布局便于安装板与换枪盘母头、吸盘组件、缓冲垫连接形成的组件之间的连接和检测。
11.进一步,所述缓冲垫包括发泡硅胶缓冲垫,所述发泡硅胶缓冲垫连接所述吸盘组件,且开设有与所述第一气孔连通的第二气孔。本结构采用发泡硅胶材料制作缓冲垫,既可起到缓冲作用,又具有一定的强度和耐磨性,且不易漏气。
12.进一步,所述缓冲垫还包括橡胶垫,所述橡胶垫与所述发泡硅胶缓冲垫贴合,所述橡胶垫上开设有与所述第二气孔连通的第三气孔。本结构中,通过橡胶垫进一步增加耐磨性。
13.进一步,所述贴标执行机构还包括管线固定架、穿线槽,所述管线固定架、穿线槽分别固定在所述安装法兰的上端和下端,且向同一侧偏离,以便于归拢电线和气管。
14.有益效果:与现有技术相比,本实用新型的优点是:通过快换结构,实现了工业机器人贴标执行机构的自动更换,自动适应不同规格的标牌贴标作业。同时,实现了换枪盘母头的精确定位,方便换枪盘公头、换枪盘母头之间的自动精确装配。
附图说明
15.图1为本实用新型的立体结构示意图;
16.图2为安装板处结构示意图;
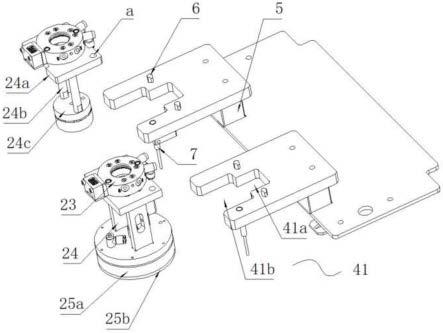
17.图3为贴标执行机构立体结构示意图。
具体实施方式
18.下面结合附图和具体实施例,进一步阐明本实用新型,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。
19.一种适用于多规格标牌贴标作业的棒材在线贴标装置,如附图1、2所示,包括工业机器人1、贴标执行机构2、工作台3、多个安装板4、立柱5、定位销6、接近传感器7。
20.工业机器人1、工作台3相邻设置。安装板4一端分叉、另一端通过立柱5固定在工作台3上,多个安装板4并排等高设置。安装板4的分叉41呈凸字形,包括位于内侧的窄口部41a以及位于外侧的宽口部41b。定位销6固定在安装板4的上表面,且位于窄口部41a两侧。接近传感器7固定在安装板4的下表面,且位于宽口部41b侧方。
21.如图3所示,贴标执行机构2包括安装法兰21、换枪盘公头22、换枪盘母头23、吸盘组件24、缓冲垫25、管线固定架26、穿线槽27。
22.换枪盘公头22通过安装法兰21固定在工业机器人1的活动端,如图2所示,换枪盘
母头23、吸盘组件24、缓冲垫25具有多个,每个换枪盘母头23分别通过吸盘组件24连接任一规格的缓冲垫25。管线固定架26、穿线槽27分别固定在安装法兰21的上端和下端,且向同一侧偏离,以归拢电线和气管。
23.本实施例中,如附图2所示,吸盘组件24具体包括吸盘座24a、吸盘支架24b、吸盘本体24c,吸盘座24a固连换枪盘母头23,吸盘支架24b连接吸盘座24a、吸盘本体24c,吸盘本体24c连接缓冲垫25,吸盘座24a上开设有定位孔a,吸盘支架24b与安装板4的分叉41对位,定位孔a与定位销6对位,吸盘本体24c与接近传感器7对位,吸盘本体24c上开设有第一气孔,第一气孔通过外部的真空发生装置抽气。
24.本实施例中,缓冲垫25具体包括发泡硅胶缓冲垫25a、橡胶垫25b,吸盘本体24c、发泡硅胶缓冲垫25a、橡胶垫25b依次贴合固定,发泡硅胶缓冲垫25a开设有第二气孔,如附图3所示,橡胶垫25b上开设有第三气孔b,第一气孔、第二气孔、第三气孔b依次连通。
25.换枪盘母头23、吸盘组件24、缓冲垫25连接形成的组件通过安装板4的分叉41卡入安装板4,安装板4的分叉41夹设吸盘支架24b形成转动限位,定位销6卡入定位孔a形成水平限位。换枪盘公头22在工业机器人1的驱动下,到达任一安装板4处,与换枪盘母头23匹配安装,以通过不同规格的缓冲垫25吸附不同规格的标牌。
26.本实施例中,具体的,换枪盘母头23、吸盘组件24、缓冲垫25、安装板4均设置了两个,两个缓冲垫25分别采用40mm和90mm直径的圆形规格,分别用于吸附40mm和90mm的标牌,装置使用前,两个缓冲垫25分别被固定到两个安装板处,通过定位销、定位孔的配合,以及分叉、吸盘支架的配合完成精确定位,同时通过接近传感器7进行在位检测。
27.当需要进行40mm标牌的贴标作业时,机器人本体驱动换枪盘公头22到达存放有40mm缓冲垫25的安装板处,通过换枪盘公头22、换枪盘母头23的快换结构完成自动装配后,即可进行40mm标牌的自动贴标作业。作业完成后,机器人本体驱动贴标执行机构达到安装板处,重新将换枪盘母头23、吸盘组件24、缓冲垫25连接后的组件卡入安装板的分叉,完成40mm缓冲垫25的放回固定,之后换枪盘公头22、换枪盘母头23分离,机器人本体即可回复原位。
28.当需要进行90mm标牌的贴标作业时,只是缓冲垫25的存放位置不同,使用原理与40mm标牌的贴标作业相同。
29.本实施例的棒材在线贴标装置通过常见的机器人快换工具,即换枪盘公头、换枪盘母头,实现了工业机器人贴标执行机构的自动更换,从而可以自动适应不同规格的标牌贴标作业,有效支撑了贴标作业的自动化改造。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
