1.本实用新型涉及自动化设备技术领域,尤其是指一种码垛装置。
背景技术:
2.码垛技术是物流自动化技术领域的一门新兴技术,所谓的码垛就是按照集成单元化思想,将一件件物料按照一定的模式堆码成垛,以便于使单元化的码垛实现物料的搬运、装卸、运输、存储等物流活动,在物体的运输过程中除了散装的物体和液体外,一般的物体都是以码垛的形式进行存储或组装,这样既可承载更多的物体,也可以节省空间。
3.现有的自动码垛机是将生产线上的产品按照一定的排列方向码放在托盘上,其放置形式大致可分为重叠式、交错式和旋转式,授权公告号为cn208700081u的实用新型专利提供了一种“自动码垛模组”,包括移载平台、机械手和码垛夹爪,码垛夹爪包括爪体1,爪体1的一端阵列分布有一排插齿7,爪体1的另一端设置有吸盘,爪体1在其插齿端上方还设置有用于限制叉料的压板4和挡片5,工作时,若干物料1从移载平台一端输送过来并前后依次排成一排,机械手得到取料信号,控制爪体1靠近物料并将插齿7运动到物料9下面,下压板4压住物料9,同时挡片5挡住物料9正前面,此时机械手整体上抬完成叉料动作,随后机械手运动到事先校好的垛型区,将物料落到码垛栈板上,往复数次完成一层的码垛,之后,机械手运动到到隔板纸位置,爪体上的吸盘吸附单张隔板纸,并将吸隔板纸放置于先前码垛好的物料9上,接着继续在隔板纸上码垛物料,如此循环。这种叉移形式的码垛机实现的是整排有限体积内物料的码垛,而对于一些更大体积的产品,如仍使用这种插齿,则势必要增大插齿的长度以及增大整个爪体的体积,十分占用空间同时也会增加一定的制造成本。
技术实现要素:
4.为此,本实用新型所要解决的技术问题在于克服现有技术中自动码垛机难以利用更为简单的结构来解决不同体积产品有序码垛的问题。
5.为解决上述技术问题,一种码垛装置,包括:
6.机械手,其上设置有固定板;
7.第一吸盘组件,其平行设置有两组,两组所述第一吸盘组件垂直连接所述固定板;
8.升降机构,其设置有两组,两组所述升降机构对称设置在所述固定板的两侧,所述升降机构与所述固定板垂直;
9.第二吸盘组件,其平行设置有两组,两组所述第二吸盘组件分别连接两个所述升降机构;
10.所述机械手附近还设置有瓦楞纸放置槽、产品放置台和托盘,所述瓦楞纸放置槽内放置有多张瓦楞纸,产品放置台上放置有多个产品,所述机械手控制所述第一吸盘组件和所述第二吸盘组件分别抓取所述产品和所述瓦楞纸并将二者交替叠放在所述托盘上。
11.在本实用新型的一个实施例中,还包括围栏,所述机械手和所述瓦楞纸放置槽安装在所述围栏内,所述托盘设置有两个,两个所述托盘分别放置于所述机械手的两侧。
12.在本实用新型的一个实施例中,所述围栏在其一侧敞口,所述产品放置台安装在靠近所述敞口的位置。
13.在本实用新型的一个实施例中,所述第一吸盘组件包括多个阵列分布的第一吸盘,所述第一吸盘与所述固定板垂直连接。
14.在本实用新型的一个实施例中,所述升降机构包括气缸和升降杆,所述升降杆连接所述气缸,所述升降杆上设置有第一固定块。
15.在本实用新型的一个实施例中,所述第二吸盘组件包括横杆和两个第二吸盘,两个所述第二吸盘对称安装在所述横杆的两端,所述横杆连接所述第一固定块。
16.在本实用新型的一个实施例中,所述横杆上设置有条形限位槽,所述条形限位槽内卡设有第二固定块,所述第二固定块连接所述第二吸盘。
17.在本实用新型的一个实施例中,所述机械手包括旋转底座、第一转动臂和第二转动臂,所述第一转动臂的一端与所述旋转底座转动连接,所述第一转动臂的另一端与所述第二转动臂的一端转动连接,所述第二转动臂的另一端连接所述固定板。
18.在本实用新型的一个实施例中,所述第二转动臂上设置有转盘,所述转盘上垂直设置有型材,所述型材垂直连接所述固定板。
19.在本实用新型的一个实施例中,所述围栏上还设置有推拉门,所述推拉门设置有多个,多个所述推拉门分别开设在所述瓦楞纸放置槽和所述托盘的对应位置处。
20.本实用新型的上述技术方案相比现有技术具有以下优点:
21.本实用新型所述的一种码垛装置,在机械手的固定板上设置第一吸盘组件和第二吸盘组件,第一吸盘组件负责将工作台上的产品进行一层的码垛,第二吸盘组件从瓦楞纸放置槽内吸附瓦楞纸放置于已经码好的产品上,如此循环,直至达到机械手所能探的最大高度,仅利用两组吸盘结构就可实现产品和瓦楞纸的交替码放,同时吸盘本身对产品的体积不作任何限制,只需调整吸盘的吸力即可对质量较大的大体积产品进行拾取,整体结构简单且高效。
附图说明
22.为了使本实用新型的内容更容易被清楚的理解,下面根据本实用新型的具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
23.图1为本实用新型码垛装置的整体结构示意图;
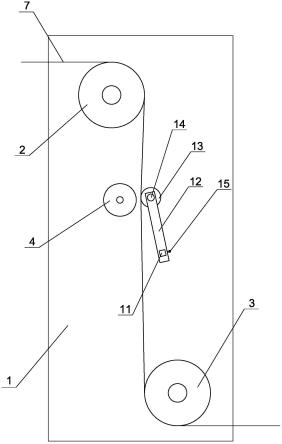
24.图2为图1所示码垛装置中吸盘组件部分的结构示意图;
25.图3为图1所示码垛装置中机械手的结构示意图。
26.说明书附图标记说明:1、机械手;101、旋转底座;102、第一转动臂;103、第二转动臂;104、转盘;2、固定板;3、第一吸盘组件;301、第一吸盘;4、升降机构;401、气缸;402、升降杆;5、第二吸盘组件;501、横杆;502、第二吸盘;6、瓦楞纸放置槽;7、产品放置台;8、托盘;9、围栏;10、条形限位槽;11、第二固定块;12、型材;13、推拉门。
具体实施方式
27.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
28.参照图1至图3所示,一种码垛装置,包括:
29.机械手1,其上设置有固定板2;
30.具体的,固定板2为方形钢板,其上设置有多个吸盘安装孔,固定板2的设计是为吸盘组件提供一个定位平面。
31.第一吸盘组件3,其平行设置有两组,两组第一吸盘组件3垂直连接固定板2;
32.具体的,第一吸盘组件3的尾部安装到固定板2上对应的吸盘安装孔处并用螺栓紧固,吸盘的头部保持在一个平面内,以保证每个吸盘同步动作。
33.升降机构4,其设置有两组,两组升降机构4对称设置在固定板2的两侧,升降机构4与固定板2垂直;
34.第二吸盘组件5,其平行设置有两组,两组第二吸盘组件5分别连接两个升降机构4;
35.具体的,升降机构4的动作方向与固定板2的平面相互垂直,这就保证了第二吸盘组件5的排布方向与第一吸盘组件3相同,一致性的保证也是为了简化机械手1动作轨迹。
36.机械手1附近还设置有瓦楞纸放置槽6、产品放置台7和托盘8,瓦楞纸放置槽6内放置有多张瓦楞纸,产品放置台7上放置有多个产品,机械手1控制第一吸盘组件3和第二吸盘组件5分别抓取产品和瓦楞纸并将二者交替叠放在托盘8上。
37.具体的,一般情况下在对产品进行吸附时,第一吸盘组件3的高度低于第二吸盘组件5的高度以保证只用第一吸盘组件3对产品进行吸附,当需要吸附瓦楞纸时,升降机构4动作并使得第二吸盘组件5高度低于第一吸盘组件3以保证只用第二吸盘组件5来吸附瓦楞纸,必要时,需要第一吸盘组件3和第二吸盘组件5进行同时吸附时,可调整升降机构4。
38.综上所述,第一吸盘组件3负责将产品放置台7上的产品进行一层的码垛,第二吸盘组件5从瓦楞纸放置槽6内吸附瓦楞纸放置于已经码好的产品上,如此循环,直至达到机械手1所能探的最大高度,仅利用两组吸盘结构就可实现产品和瓦楞纸的交替码放,同时吸盘本身对产品的体积不作任何限制,只需调整吸盘的吸力即可对质量较大的大体积产品进行拾取,整体结构简单且高效。
39.进一步的,还包括围栏9,机械手1和瓦楞纸放置槽6安装在围栏9内,托盘8设置有两个,两个托盘8分别放置于机械手1的两侧。
40.具体的,围栏9采用网格形状,既能对围栏9外的操作人员起到一定的保护作用,又能清楚的观察到围栏9内机械手1的动作情况,同时,围栏9的大小要保证能同时放置两个平行托盘8和机械手1,同时不影响机械手1的最大活动范围。
41.进一步的,围栏9上还设置有推拉门13,推拉门13设置有多个,多个推拉门13分别开设在瓦楞纸放置槽6和托盘8的对应位置处。
42.具体的,推拉门13的上部与围栏9的骨架滑动连接,其下部安装有导轮,推拉门13的设计是为了叉车的前端能够叉入以便叉起托盘8,同时也是为了方便操作人员对瓦楞纸放置槽6内及时进行补充纸张。
43.进一步的,围栏9在其一侧敞口,产品放置台7安装在靠近敞口的位置。以方便机械手1仅通过小范围移动即可实现对产品的吸附。
44.参照图2所示,第一吸盘组件3包括多个阵列分布的第一吸盘301,第一吸盘301与固定板2垂直连接。
45.具体的,单组第一吸盘组件3可设置4只第一吸盘301,吸盘的数量可根据产品所需吸力及吸盘最大承载量灵活设定。
46.进一步的,升降机构4包括气缸401和升降杆402,升降杆402连接气缸401,升降杆402上设置有第一固定块。
47.具体的,第一固定块与升降杆402垂直连接且朝外,以方便搭载第二吸盘组件5。
48.进一步的,第二吸盘组件5包括横杆501和两个第二吸盘502,两个第二吸盘502对称安装在横杆501的两端,横杆501连接第一固定块。
49.具体的,横杆501既延伸了第二吸盘502所能吸附的最大截面积,也对第二吸盘502起到支撑和固定作用。
50.进一步的,横杆501上设置有条形限位槽10,条形限位槽10内卡设有第二固定块11,第二固定块11连接第二吸盘502。
51.具体的,横杆501为一型材12,其上的条形限位槽10配合卡块和连接螺钉可对第二固定块11进行紧固,可以想象到的是,第二固定块11可沿着条形槽进行滑动以方便调节两个第二吸盘502的相对位置,更多的,横杆501的两端还安装有槽挡板。
52.参照图3所示,机械手1包括旋转底座101、第一转动臂102和第二转动臂103,第一转动臂102的一端与旋转底座101转动连接,第一转动臂102的另一端与第二转动臂103的一端转动连接,第二转动臂103的另一端连接固定板2。
53.具体的,旋转底座101靠固定座安装在围栏9内,机械手1不仅可以整体进行转动以方便对左右两个托盘8进行操作,同时两个转动臂的设计也增大了机械手1的操作灵活性。
54.进一步的,第二转动臂103上设置有转盘104,转盘104上垂直设置有型材12,型材12垂直连接固定板2。
55.具体的,当机械手1控制吸盘吸附产品到托盘8上端时,该转盘104的周向移动可使得产品摆放的角度更自由,使操作更便捷。
56.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。