1.本发明涉及输送式除尘清洁设备技术领域,具体涉及一种智能图书除尘装置。
背景技术:
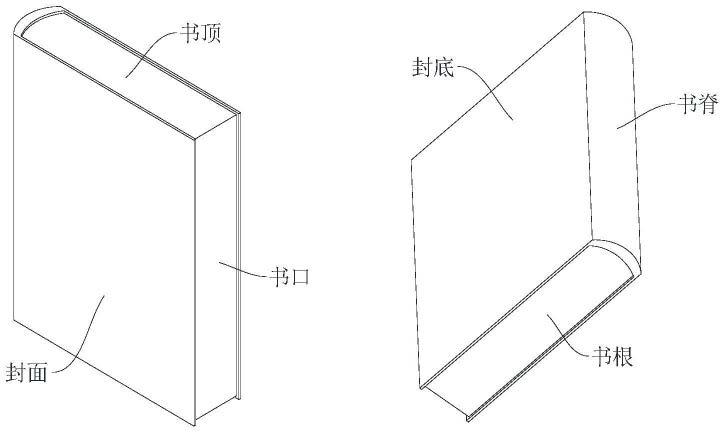
2.博物馆、档案馆、图书馆均是将图书放置于展示箱内或密集架上,经过长时间的摆放后,图书的各个部位(包括书顶、书根、书口、书脊、封面和封底,参阅图1)均会沾染、积累很多灰尘,因此,管理人员需要定期进行清洁,以保证图书的清洁性。
3.目前,对图书的除尘操作一般是通过毛刷和吸尘设备相互配合从而达到对图书的除尘清洁目的,具体地,是在一个操作台上设计一个防护罩,然后,将待除尘的图书放置在防护罩内,再使用手持式吸尘设备来对图书的各个部位进行除尘清洁。这样虽然也能达到清洁的目的,但是,每次只能拿取一本图书,并且,每个部位的清洁都需翻动图书,效率较低,且耗费人力。因此,如何方便快速地对图书各个部位进行除尘,并且,提高除尘清洁效率,是本领域技术人员亟待解决的问题。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种智能图书除尘装置,以实现对图书各个部位的有效清洁,并且,通过智能化的连续除尘作业,提高对图书除尘清洁效率。
5.为了实现上述目的,本发明提供一种智能图书除尘装置,包括箱体,其具有内腔,所述箱体设置有与所述内腔连通的进料口和出料口;吸尘组件,其与所述内腔连通;以及除尘机构,其设置在所述内腔中,所述除尘机构包括:
6.第一输送组件,其穿过所述进料口后伸出所述箱体外;第一清洁组件,其靠近所述进料口,其用于清洁图书的书顶和书根;第二输送组件,其与所述第一输送组件的尾端衔接;第二清洁组件,其设置在所述第一输送组件与所述第二输送组件之间,其用于清洁图书的封面和封底;第三输送组件,其与所述第二输送组件错位布置,所述第三输送组件穿过所述出料口后伸出所述箱体外,所述第三输送组件的宽度小于所述第二输送组件的宽度,所述第三输送组件、所述第二输送组件和所述第一输送组件的输送面齐平,且所述第三输送组件、所述第二输送组件和所述第一输送组件的输送方向相同;第三清洁组件,其靠近所述出料口,其用于清洁图书的书脊和书口;以及转位机构,其设置在所述第二输送组件的尾端,并位于所述第三输送组件的一侧,所述转位机构用于将图书从所述第二输送组件转移到所述第三输送组件上,并对图书进行九十度旋转,以使图书的长度方向平行于所述第三输送组件的输送方向。
7.优选地,所述转位机构包括:方形壳体,其设置有安装腔,所述方形壳体的周向侧壁贯穿有让位间隙,所述方形壳体的四周面分别形成有限位面,分别记为限位面a、限位面b、限位面c和限位面d,所述限位面a与所述限位面c相对布置,所述限位面b与所述限位面d相对布置,所述限位面a靠近所述第二输送组件并垂直于所述第二输送组件的输送方向,所述限位面b靠近所述第三输送组件;
8.四个托举单元,分别记为托举单元a、托举单元b、托举单元c和托举单元d,分别转动设置在所述安装腔内,所述托举单元a和所述托举单元b穿过所述让位间隙后伸出所述限位面a外,所述托举单元a和所述托举单元b布置在所述第二输送组件的两侧,所述托举单元c和所述托举单元d穿过所述让位间隙后伸出所述限位面c外,所述托举单元a的托举面低于所述第二输送组件的输送面;
9.升降旋转机构,其用于驱动所述方形壳体依次做上升、朝所述第三输送组件一方九十度旋转和下降动作,在所述方形壳体上升后,所述方形壳体的底面高于所述第二输送组件的输送面;以及
10.位置调节机构,其用于在所述方形壳体旋转后驱动所述托举单元a、所述托举单元b、所述托举单元c和所述托举单元d同步做九十度旋转。
11.优选地,所述托举单元a包括连接的第一转轴a和托臂a,所述托举单元b包括连接的第一转轴b和托臂b,所述托举单元c包括连接的第一转轴c和托臂c,所述托举单元d包括连接的第一转轴d和托臂d;
12.所述第一转轴a、第一转轴b、第一转轴c和第一转轴d分别沿竖向设置在所述安装腔的四角并呈正方形阵列布置,所述托臂a和所述托臂b穿过所述让位间隙后伸出所述限位面a外,所述托臂a与所述托臂b分别布置在所述第二输送组件的两侧,所述托臂c和所述托臂d穿过所述让位间隙后伸出所述限位面c外。
13.优选地,所述位置调节机构包括:第一减速电机,其设置在所述安装腔内;第一蜗杆,其设置在所述第一减速电机的转轴上,所述第一转轴a和所述第一转轴d位于所述第一蜗杆的同侧,所述第一转轴b和所述第一转轴c位于所述第一蜗杆的同侧;两根第二转轴,分别记为第二转轴a和第二转轴b,所述第二转轴a和所述第二转轴b分别沿竖向转动设置在所述安装腔内并分别布置在所述第一蜗杆的两侧;
14.两个第一蜗轮,分别记为第一蜗轮a和第一蜗轮b,所述第一蜗轮a固定穿设在所述第二转轴a上,所述第一蜗轮b固定穿设在所述第二转轴b上,所述第一蜗轮a和所述第一蜗轮b分别与所述第一蜗杆啮合;以及
15.两组传动组件,分别记为传动组件a和传动组件b,所述传动组件a用于传动连接所述第一转轴a和所述第一转轴d,所述传动组件b用于传动连接所述第一转轴b和所述第一转轴c。
16.优选地,所述第一转轴a上固定穿设有第一齿轮a,所述第一转轴b上固定穿设有第一齿轮b,所述第一转轴c上固定穿设有第一齿轮c,所述第一转轴d上固定穿设有第一齿轮d;
17.所述传动组件a包括第二齿轮a、第三转轴a和第三齿轮a,所述第二齿轮a穿设固定在所述第二转轴a上并与所述第一齿轮a啮合,所述第三转轴a布置在所述第一转轴a与所述第一转轴d之间,所述第三齿轮a穿设固定在所述第三转轴a上并分别与所述第二齿轮a和所述第一齿轮d啮合;
18.所述传动组件b包括第二齿轮b、第三转轴b和第三齿轮b,所述第二齿轮b穿设固定在所述第二转轴b上并与所述第一齿轮b啮合,所述第三转轴b布置在所述第一转轴b与所述第一转轴c之间,所述第三齿轮b穿设固定在所述第三转轴b上并分别与所述第二齿轮b和所述第一齿轮c啮合。
19.优选地,所述升降旋转机构包括第一基座、第二基座、升降组件和旋转组件;所述第一基座设置在所述方形壳体的下方,所述第二基座设置在所述第一基座与所述方形壳体之间,所述升降组件设置在所述第一基座上并用于驱动所述第二基座做升降动作,以使所述方形壳体的底面高于所述第二输送组件和所述第三输送组件的输送面,所述旋转组件用于驱动所述方形壳体朝所述第三输送组件一方做九十度旋转。
20.优选地,所述第一清洁组件包括第一立式清洁辊a、第一立式导向辊组件a、第一立式清洁辊b、第一立式导向辊组件b、第一限位调节气缸和长度测量传感器;
21.所述第一立式清洁辊a与所述第一立式清洁辊b分别布置在所述第一输送组件的两侧,所述第一限位调节气缸用于驱动所述第一立式清洁辊a相对所述第一输送组件做靠近或远离动作;
22.所述第一立式导向辊组件a设置在所述第一立式清洁辊a上,所述第一立式导向辊组件b设置在所述第一立式清洁辊b上,所述第一立式导向辊组件b穿过所述出料口并延伸出所述箱体外,所述长度测量传感器设置在所述箱体所述进料口上。
23.优选地,所述第三清洁组件包括第三立式清洁辊a、第三立式导向辊组件、第三立式清洁辊b、第三限位调节气缸和宽度测量传感器;
24.所述第三立式清洁辊a与所述第三立式清洁辊b分别布置在所述第三输送组件的两侧并靠近所述出料口,所述第三立式清洁辊a位于所述方形壳体的相对侧,所述第三限位调节气缸用于驱动所述第三立式清洁辊a相对所述第三输送组件做靠近或远离动作;
25.所述第三立式导向辊组件设置在所述第三立式清洁辊a上,所述第三立式导向辊组件沿所述第三输送组件的输送方向朝第二输送组件一方延伸,所述第三立式导向辊组件上设置有避让所述托臂a、所述托臂b、所述托臂c和所述托臂d旋转的避让间隙,所述宽度测量传感器设置在所述内腔的腔顶并位于所述第二清洁组件与所述方形壳体之间。
26.本发明的有益效果:
27.本发明公开了一种智能图书除尘装置,只需将图书的书脊或书口正对进料口并将图书放置在第一输送组件上,通过各个机构额相互配合,就能够将图书的书顶、书根、封面、封底、书脊和书口进行全方位的除尘清洁,实现了对图书各个部位的有效清洁,除尘清洁效果好。同时,该除尘装置能够进行智能化的连续除尘作业,提高了对图书除尘清洁效率,也减少了管理人员的工作量和劳动强度。并且,清洁时产生的灰尘会被吸尘组件抽吸,不会外溢出箱体外,从而避免了灰尘污染环境。
附图说明
28.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
29.图1为图书各个部位的示意图;
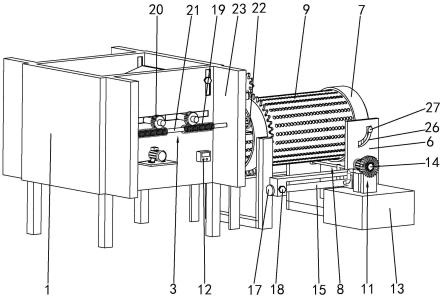
30.图2为本发明一实施例提供的智能图书除尘装置的结构示意图;
31.图3为箱体内部的结构示意图;
32.图4为方形壳体内部的结构示意图;
33.图5为位置调节机构的结构示意图;
34.图6为图5状态下的俯视图;
35.图7为托臂a和托臂d旋转至限位面b一侧的结构示意图;
36.图8为图7状态下的俯视图;
37.图9为图书的书脊或书口抵接限位面a时的结构示意图;
38.图10为方形壳体上升后的结构示意图;
39.图11为方形壳体旋转九十度后的结构示意图;
40.图12为图11中a处的局部放大图;
41.图13为图书掉落在第三输送组件上的结构示意图;
42.附图标记:
43.10-箱体,11-内腔,12-进料口,13-出料口;
44.20-吸尘组件;
45.30-第一输送组件;
46.40-第一清洁组件,41-第一立式清洁辊a,42-第一立式导向辊组件a,43-第一立式清洁辊b,44-第一立式导向辊组件b,45-第一限位调节气缸,46-长度测量传感器;
47.50-第二输送组件;
48.60-第二清洁组件;
49.70-第三输送组件;
50.80-第三清洁组件,81-第三立式清洁辊a,82-第三立式导向辊组件,821-避让间隙,83-第三立式清洁辊b,84-第三限位调节气缸,85-宽度测量传感器;
51.90-方形壳体,91-安装腔,92-让位间隙,93-限位面a,94-限位面b,95-限位面c,96-限位面d,97-第二安装筒体;
52.101-托举单元a,1011-第一转轴a,1012-托臂a,1013-第一齿轮a,102-托举单元b,1021-第一转轴b,1022-托臂b,1023-第一齿轮b,103-托举单元c,1031-第一转轴c,1032-托臂c,1033-第一齿轮c,104-托举单元d,1041-第一转轴d,1042-托臂d,1043-第一齿轮d;
53.110-升降旋转机构,111-第一基座,112-第二基座,113-第一安装筒体,114-第二蜗轮,115-第二减速电机,116-第二蜗杆,117-可调行程气缸,118-导向杆;
54.120-位置调节机构,121-第一减速电机,122-第一蜗杆,1231-第二转轴a,1232-第二转轴b,1241-第一蜗轮a,1242-第一蜗轮b,1251-第二齿轮a,1252-第三转轴a,1253-第三齿轮a,1261-第二齿轮b,1262-第三转轴b,1263-第三齿轮b。
具体实施方式
55.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
56.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
57.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或
位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
58.此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。在本发明的描述中,“多个”的含义是两个以上,除非另有明确具体的限定。
59.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
60.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
61.如图2-13所示,在本发明的一实施例中,提供一种智能图书除尘装置,包括箱体10、吸尘组件20和除尘机构,箱体10具有内腔11,箱体10设置有与内腔11连通的进料口12和出料口13,除尘机构安装在内腔11中,吸尘组件20与内腔11连通,吸尘组件20用于抽吸内腔11中的灰尘,具体地,吸尘组件20设计在除尘机构的下方,箱体10内设计有用于支撑除尘机构的隔板,隔板上贯穿有多个吸尘孔,吸尘组件20为现有技术,在此不再赘述。
62.除尘机构包括第一输送组件30、第一清洁组件40、第二输送组件50、第二清洁组件60、第三输送组件70、第三清洁组件80和转位机构。第一输送组件30穿过进料口12后伸出箱体10外,第一清洁组件40靠近进料口12并用于清洁图书的书顶和书根。第二输送组件50与第一输送组件30的尾端衔接,第二清洁组件60设置在第一输送组件30与第二输送组件50之间,并用于清洁图书的封面和封底。
63.第三输送组件70与第二输送组件50错位布置,第三输送组件70穿过出料口13后伸出箱体10外,第三输送组件70的宽度小于第二输送组件50的宽度,第三输送组件70、第二输送组件50和第一输送组件30的输送面齐平,且第三输送组件70、第二输送组件50和第一输送组件30的输送方向相同,第三清洁组件80靠近出料口13,并用于清洁图书的书脊和书口。
64.转位机构设置在第二输送组件50的尾端,并位于第三输送组件70的一侧,转位机构用于将图书从第二输送组件50转移到第三输送组件70上,并对图书进行九十度旋转,以使图书的长度方向平行于第三输送组件70的输送方向。
65.在使用该除尘装置来对图书进行除尘操作时,操作者将图书的书脊或书口正对进料口12并将图书放置在第一输送组件30上,第一输送组件30输送图书的过程中,第一清洁组件40会同时对图书的书顶和书根进行除尘清洁,当图书经过第二清洁组件60时,第二清洁组件60会同时对图书的封面和封底进行除尘清洁。
66.当图书移动到第二输送组件50的尾端,转位机构将图书从第二输送组件50转移到第三输送组件70上,并对图书进行九十度旋转,此时,图书的长度方向平行于第三输送组件70的输送方向,并且,由于第三输送组件70的宽度小于第二输送组件50的宽度,图书的书脊
和书口会伸出第三输送组件70外,然后,当图书经过第三清洁组件80时,第三清洁组件80会同时对图书的书脊和书口进行除尘清洁。至此,图书的书顶、书根、封面、封底、书脊和书口均被清洁,最后,干净的图书从出料口13输送出。
67.上述吸尘组件20、第一输送组件30、第一清洁组件40、第二输送组件50、第二清洁组件60、第三输送组件70、第三清洁组件80和转位机构均由控制器(附图未示出)控制,控制器可以是plc等,在此不再赘述。
68.该智能图书除尘装置只需将图书的书脊或书口正对进料口12并将图书放置在第一输送组件30上,通过各个机构额相互配合,就能够将图书的书顶、书根、封面、封底、书脊和书口进行全方位的除尘清洁,实现了对图书各个部位的有效清洁,除尘清洁效果好。同时,该除尘装置能够进行智能化的连续除尘作业,提高了对图书除尘清洁效率,也减少了管理人员的工作量和劳动强度。并且,清洁时产生的灰尘会被吸尘组件20抽吸,不会外溢出箱体10外,从而避免了灰尘污染环境。
69.在一个实施例中,转位机构包括方形壳体90、四个托举单元、升降旋转机构110和位置调节机构120。
70.方形壳体90在水平面的投影呈正方形,方形壳体90设置有安装腔91,方形壳体90的周向侧壁贯穿有让位间隙92,方形壳体90的四周面分别形成有限位面,分别记为限位面a93、限位面b94、限位面c95和限位面d96,限位面a93与限位面c95相对布置,限位面b94与限位面d96相对布置,限位面a93靠近第二输送组件50并垂直于第二输送组件50的输送方向,限位面b94靠近第三输送组件70。
71.四个托举单元,分别记为托举单元a101、托举单元b102、托举单元c103和托举单元d104,分别转动设置在安装腔91内,托举单元a101和托举单元b102穿过让位间隙92后伸出限位面a93外,托举单元a101和托举单元b102布置在第二输送组件50的两侧,托举单元c103和托举单元d104穿过让位间隙92后伸出限位面c95外,托举单元a101的托举面低于第二输送组件50的输送面。
72.具体地,参阅图4和图5,托举单元a101包括连接的第一转轴a1011和托臂a1012,托举单元b102包括连接的第一转轴b1021和托臂b1022,托举单元c103包括连接的第一转轴c1031和托臂c1032,托举单元d104包括连接的第一转轴d1041和托臂d1042。第一转轴a1011、第一转轴b1021、第一转轴c1031和第一转轴d1041分别沿竖向设置在安装腔91的四角并呈正方形阵列布置,托臂a1012和托臂b1022穿过让位间隙92后伸出限位面a93外,托臂a1012与托臂b1022分别布置在第二输送组件50的两侧,托臂c1032和托臂d1042穿过让位间隙92后伸出限位面c95外。
73.升降旋转机构110用于驱动方形壳体90依次做上升、朝第三输送组件70一方九十度旋转和下降动作,在方形壳体90上升后,方形壳体90的底面高于第二输送组件50的输送面。位置调节机构120用于在方形壳体90旋转后驱动托举单元a101、托举单元b102、托举单元c103和托举单元d104同步做九十度旋转。
74.参阅图9-11,由于操作者是将图书的书脊或书口正对进料口12并将图书放置在第一输送组件30上输送,当图书输送至第二输送组件50的尾端时,图书的书脊或书口会抵接在方形壳体90的限位面a93上,而后,控制器启动升降旋转机构110使其驱动方形壳体90上升,使方形壳体90的底面高于第二输送组件50的输送面,托臂a1012和托臂b1022会将图书
抬升使其脱离第二输送组件50。升降旋转机构110再驱动方形壳体90朝第三输送组件70一方做九十度旋转,使限位面a93旋转至近第三输送组件70的一侧,此时,托臂a1012、托臂b1022和图书旋转至第三输送组件70的上方,图书的长度方向平行于第三输送组件70的输送方向,而托臂c1032和托臂d1042则连同限位面c95旋转至方形壳体90背离第三输送组件70的一侧,限位面d96则靠近第二输送组件50的尾端。
75.然后,控制器启动位置调节机构120,位置调节机构120同步驱动第一转轴a1011、第一转轴b1021、第一转轴c1031和第一转轴d1041旋转,具体地,第一转轴a1011带动托臂a1012沿让位间隙92朝限位面b94一方做九十度旋转,第一转轴b1021带动托臂b1022沿让位间隙92朝限位面d96一方做九十度旋转,这样,图书在失去托臂a1012和托臂b1022的承托后,会掉落在第三输送组件70上,此时,图书的长度方向平行于第三输送组件70的输送方向,且图书的书脊和书口会伸出第三输送组件70外,第三输送组件70会输送图书经过第三清洁组件80,第三清洁组件80会对图书的书脊和书口进行除尘清洁,最后,干净的图书从出料口13输送出。
76.在托臂a1012和托臂b1022旋转的同时,第一转轴c1031也会带动托臂c1032沿让位间隙92朝限位面d96一方做九十度旋转,第一转轴d1041会带动托臂d1042沿让位间隙92朝限位面b94一方做九十度旋转,这样一来,托臂b1022和托臂c1032转位到了第二输送组件50的上方,而托臂a1012和托臂d1042转位到了限位面b94的一侧,此时,限位面b94处于方形壳体90背离第二输送组件50的一侧。
77.然后,控制器启动升降旋转机构110使其带动方形壳体90下降,托臂b1022和托臂c1032就处于第二输送组件50的两侧,并且,托臂b1022的托举面(托臂b1022的顶面)也会低于第二输送组件50的输送面。这样,操作者又可放置下一本待除尘的图书,当然,该图书的书脊或书口也要正对进料口12,从而可进行连续的除尘清洁作业。
78.在一个实施例中,位置调节机构120包括第一减速电机121、第一蜗杆122、两根第二转轴、两个第一蜗轮和两组传动组件。第一减速电机121设置在安装腔91内,第一蜗杆122固定套设在第一减速电机121的转轴上,第一转轴a1011和第一转轴d1041位于第一蜗杆122的同侧,第一转轴b1021和第一转轴c1031位于第一蜗杆122的同侧。
79.两根第二转轴分别记为第二转轴a1231和第二转轴b1232,第二转轴a1231和第二转轴b1232分别沿竖向转动设置在安装腔91内并分别布置在第一蜗杆122的两侧。两个第一蜗轮分别记为第一蜗轮a1241和第一蜗轮b1242,第一蜗轮a1241固定穿设在第二转轴a1231上,第一蜗轮b1242固定穿设在第二转轴b1232上,第一蜗轮a1241和第一蜗轮b1242分别与第一蜗杆122啮合。两组传动组件,分别记为传动组件a和传动组件b,传动组件a用于传动连接第一转轴a1011和第一转轴d1041,传动组件b用于传动连接第一转轴b1021和第一转轴c1031。
80.具体地,第一转轴a1011上固定穿设有第一齿轮a1013,第一转轴b1021上固定穿设有第一齿轮b1023,第一转轴c1031上固定穿设有第一齿轮c1033,第一转轴d1041上固定穿设有第一齿轮d1043。
81.传动组件a包括第二齿轮a1251、第三转轴a1252和第三齿轮a1253,第二齿轮a1251穿设固定在第二转轴a1231上并与第一齿轮a1013啮合,第三转轴a1252布置在第一转轴a1011与第一转轴d1041之间,第三齿轮a1253穿设固定在第三转轴a1252上并分别与第二齿
轮a1251和第一齿轮d1043啮合。传动组件b包括第二齿轮b1261、第三转轴b1262和第三齿轮b1263,第二齿轮b1261穿设固定在第二转轴b1232上并与第一齿轮b1023啮合,第三转轴b1262布置在第一转轴b1021与第一转轴c1031之间,第三齿轮b1263穿设固定在第三转轴b1262上并分别与第二齿轮b1261和第一齿轮c1033啮合。
82.当限位面a93旋转至近第三输送组件70的一侧后,托臂a1012、托臂b1022和图书也旋转至第三输送组件70的上方,控制器启动第一减速电机121,使其带动第一蜗杆122旋转,第一蜗杆122会同步带动第一蜗轮a1241和第一蜗轮b1242旋转(第一蜗轮a1241和第一蜗轮b1242的旋转方向相反),第一蜗杆122a则带动第二转轴a1231转动,第二转轴a1231相应地带动第二齿轮a1251旋转,第二齿轮a1251则同步带动第一齿轮a1013和第三齿轮a1253旋转,第三齿轮a1253最后带动与其啮合的第一齿轮d1043旋转,第一齿轮a1013和第一齿轮d1043的旋转方向相反。这样一来,第一齿轮a1013会带动第一转轴a1011转动,第一齿轮d1043会带动第一转轴d1041转动,从而使托臂a1012和托臂d1042同步旋转至限位面b94的一侧。
83.同样的原理,第一蜗轮b1242旋转后,经过传动,第一齿轮b1023和第一齿轮c1033也会同步转动,第一齿轮b1023和第一齿轮c1033的旋转方向相反,并且,第一齿轮b1023与第一齿轮a1013的旋转方向相反,第一齿轮c1033与第一齿轮d1043的旋转方向相反(即第一齿轮a1013与第一齿轮c1033的旋转方向相同,第一齿轮b1023与第一齿轮d1043的旋转方向相同)。位置调节机构120的结构构思巧妙,能够保证托臂a1012、托臂b1022、托臂c1032和托臂d1042的协同动作,同时,位置调节机构120的结构使得每次方形壳体90只做上升、旋转和下降动作即可。并且,蜗轮蜗杆的自锁特性,能够精确、可靠地把托臂a1012、托臂b1022、托臂c1032和托臂d1042锁定在需要的停止位置上,提升了该装置的可靠性。
84.在一个实施例中,升降旋转机构110包括第一基座111、第二基座112、升降组件和旋转组件。第一基座111设置在方形壳体90的下方,第二基座112设置在第一基座111与方形壳体90之间,升降组件设置在第一基座111上并用于驱动第二基座112做升降动作,以使方形壳体90的底面高于第二输送组件50和第三输送组件70的输送面,旋转组件用于驱动方形壳体90朝第三输送组件70一方做九十度旋转。
85.具体地,第二基座112设置有第一安装筒体113,方形壳体90的底部设置有第二安装筒体97,第二安装筒体97转动设置在第一安装筒体113内,升降组件与第一安装筒体113的底部连接。旋转组件包括第二蜗轮114、第二减速电机115和第二蜗杆116,第二蜗轮114固定套设在第二安装筒体97的外壁上,第二减速电机115安装在第二基座112上,第二蜗杆116同轴设置在第二减速电机115的输出轴上,并与第二蜗轮114啮合。升降组件采用可调行程气缸117与导向杆118相互配合来实现方形壳体90的升降,升降组件与旋转组件均为现有技术,在此不再赘述。
86.在一个实施例中,第一清洁组件40包括第一立式清洁辊a41、第一立式导向辊组件a42、第一立式清洁辊b43、第一立式导向辊组件b44、第一限位调节气缸45和长度测量传感器46。第一立式清洁辊a41与第一立式清洁辊b43分别布置在第一输送组件30的两侧,第一限位调节气缸45用于驱动第一立式清洁辊a41相对第一输送组件30做靠近或远离动作。第一立式导向辊组件a42设置在第一立式清洁辊a41上,第一立式导向辊组件b44设置在第一立式清洁辊b43上,第一立式导向辊组件b44穿过出料口13并延伸出箱体10外,长度测量传
感器46设置在箱体10进料口12上。
87.当操作者将图书的书脊或书口正对进料口12,然后将图书的书顶或书根抵接在第一立式导向辊组件b44的输送面上,并将图书放置在第一输送组件30上,第一输送组件30输送图书进入进料口12的过程中,长度测量传感器46会对图书的长度尺寸进行测量,长度测量传感器46会将电信号传送至控制器,控制器再驱动第一限位调节气缸45调节第一立式导向辊组件a42输送面与第一立式导向辊组件b44输送面之间的间距,使上述间距率略大于图书的长度尺寸,这样一来,在第一立式导向辊组件a42和第一立式导向辊组件b44的限位导向作用下,图书会沿着第一输送组件30移动,并且,第一立式清洁辊a41也会在第一限位调节气缸45的带动下来调整与第一立式清洁辊b43之间的间距,从而保证对图书的书顶和书根的清洁效果。
88.在一个实施例中,第三清洁组件80包括第三立式清洁辊a81、第三立式导向辊组件82、第三立式清洁辊b83、第三限位调节气缸84和宽度测量传感器85。第三立式清洁辊a81与第三立式清洁辊b83分别布置在第三输送组件70的两侧并靠近出料口13,第三立式清洁辊a81位于方形壳体90的相对侧,第三限位调节气缸84用于驱动第三立式清洁辊a81相对第三输送组件70做靠近或远离动作。第三立式导向辊组件82设置在第三立式清洁辊a81上,第三立式导向辊组件82沿第三输送组件70的输送方向朝第二输送组件50一方延伸,第三立式导向辊组件82上设置有避让托臂a1012、托臂b1022、托臂c1032和托臂d1042旋转的避让间隙821,宽度测量传感器85设置在内腔11的腔顶并位于第二清洁组件60与方形壳体90之间。
89.当图书在第二输送组件50上经过宽度测量传感器85的测量后,宽度测量传感器85会将电信号传送至控制器,控制器会带动第三限位调节气缸84来调节第三立式导向辊组件82的输送面与限位面b94之间的间距,使上述间距略大于图书的宽度。
90.然后,当限位面a93旋转至近第三输送组件70的一侧后,托臂a1012、托臂b1022和图书也旋转至第三输送组件70的上方,此时,限位面a93与第三立式导向辊组件82之间的间距,与刚才限位面b94与第三立式导向辊组件82之间的间距是相同。
91.控制器启动第一减速电机121,第一转轴a1011带动托臂a1012沿让位间隙92朝限位面b94一方做九十度旋转,第一转轴b1021带动托臂b1022沿让位间隙92朝限位面d96一方做九十度旋转,这样,图书在失去托臂a1012和托臂b1022的承托后,会向下掉落在第三输送组件70上,而在第三立式导向辊组件82与限位面a93的共同作用下,能够保证图书能够准确且稳定的掉落在第三输送组件70上,从而使得后续第三清洁组件80能够对图书的书脊和书口进行有效的清洁。
92.并且,通过在第三立式导向辊组件82上设置避让间隙821,从而使得第三限位调节气缸84在调节第三立式导向辊组件82与方形壳体90的间距时,能够对旋转的托臂a1012、托臂b1022、托臂c1032和托臂d1042进行避让。
93.本发明的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
94.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进
行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。