基于机械臂3d打印平台的曲面路径规划方法、装置、处理器及其计算机可读存储介质
技术领域
1.本发明涉及增材制造领域,尤其是针对机器人与增材制造技术相结合的曲面路径规划方法,具体是指一种基于机械臂3d打印平台的曲面路径规划方法、装置、处理器及其计算机可读存储介质。
背景技术:
2.增材制造技术(additive manufacturing,am),又称3d打印技术。相比与传统的减材制造,大大缩短了从概念设计到原型制造的时间。增材制造工艺允许直接从数字模型开始创建三维对象,数字模型一般是由计算机辅助设计(cad)软件生成,并通过切片软件提供的算法进行预处理,该算法将数字模型分解成数量有限的薄片层,然后3d打印机将逐层创建对象。
3.传统的3d打印机大多数为三自由度,只允许打印头在平面上的平移运动,用于进行路径规划的切片软件只提供平面切片算法,这使得材料层叠在单一的轴上,在该建造方向上的机械性能明显降低,而在xy平面上也会存在各向异性的问题,这是因为材料在各层中路径的方向性导致的。同时由于每一层层厚有限,使用平面层逼近倾斜轮廓时,会产生明显的阶梯效应,表面光洁度较差。
4.因此具有多自由度的3d打印设备受到越来越广泛的关注。工业机器人已经在诸多领域获得了广泛应用,其不仅具有更高的自由度,操作灵活、适应性强的特点使得机器人能胜任各种生产任务。此外,由于am材料的堆积依靠材料本身的化学和物理特性,通过熔融或固化成形,与切削加工相比对加工力的要求较低。因此将机械手臂的灵活性、适应性和可协作性与3d打印工艺结合,能够充分发挥am中材料定制化的优势。
技术实现要素:
5.本发明搭建了一个基于机械臂的3d打印平台,将定制的挤出机安装在机械臂末端,为了充分利用多轴设备的多自由度优势,提出了一种曲面路径规划方法,旨在提升打印物体的表面质量。
6.本发明的技术方案如下:一种基于机械臂3d打印平台的曲面路径规划方法。首先,将打印模型进行适当的变形,将弯曲的模型进行扁平化变形,并存储模型的变形场;之后基于扁平化的网格模型进行切片、路径规划与填充;最后将生成的平面路径基于变形场通过逆映射转化为曲面路径。在本流程中主要分为三个部分:(1)网格扁平化变形;(2)连续路径规划;(3)曲面打印路径转化。之后,为机械臂规划相应的空间路径,通过点云法向量估计方法为每层路径上各点生成法向量,计算机械臂末端与法向量对齐的四元数,生成无碰撞的空间路径。在打印过程中,同步机械臂运动速度与挤出机挤出速度,使两套系统能良好配合完成打印任务。
7.该基于机械臂3d打印平台的曲面路径规划装置,其主要特点是,所述的装置包括:
8.处理器,被配置成执行计算机可执行指令;
9.存储器,存储一个或多个计算机可执行指令,所述计算机可执行指令被所述处理器执行时,实现上述所述的基于机械臂3d打印平台的曲面路径规划方法的各个步骤。
10.该基于机械臂3d打印平台的曲面路径规划的处理器,其主要特点是,所述的处理器被配置成执行计算机可执行指令,所述的计算机可执行指令被所述的处理器执行时,实现上述所述的基于机械臂3d打印平台的曲面路径规划方法的各个步骤。
11.该计算机可读存储介质,其主要特点是,其上存储有计算机程序,所述的计算机程序可被处理器执行以实现上述所述的基于机械臂3d打印平台的曲面路径规划方法的各个步骤。
12.本发明还涉及一种相应的装置、处理器及其计算机可读存储介质,采用了本发明的该基于机械臂3d打印平台的曲面路径规划方法、装置、处理器及其计算机可读存储介质,能发挥多自由度设备的优势,与传统3d打印机打印出的物体相比,打印物体的表面质量有显著提升。
附图说明
13.图1为本发明的机械臂3d打印平台示意图。
14.图2为本发明的定制挤出机设计示意图。
15.图3为本发明的定制挤出机设计另一示意图。
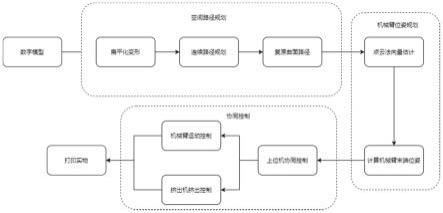
16.图4为基于机械臂3d打印平台的曲面路径规划方法的流程图。
17.图5(a)、5(b)、5(c)分别为本发明的曲面路径规划中模型的变化示意图。
18.图6为本发明的材料体积平衡示意图。
19.图7(a)、7(b)、7(c)、7(d)分别为使用本发明的曲面路径规划方法打印物体的实物对比图。
具体实施方式
20.为了能够更清楚地描述本发明的技术内容,下面结合具体实施例来进行进一步的描述。
21.在详细说明根据本发明的实施例前,应该注意到的是,在下文中,术语“包括”、“包含”或任何其他变体旨在涵盖非排他性的包含,由此使得包括一系列要素的过程、方法、物品或者设备不仅包含这些要素,而且还包含没有明确列出的其他要素,或者为这种过程、方法、物品或者设备所固有的要素。
22.下面结合附图,对本发明做进一步说明:
23.本发明是一种基于机械臂3d打印平台的曲面路径规划方法。
24.如图1所示,将机械臂与热床水平安装在基板上,挤出机与热床由单片机进行控制,单片机和机械臂由pc上位机协同控制。本平台使用的多轴机械臂型号是universal robot公司生成的ur3型协作型机器人,挤出机插件是16位arduino mega 2560单片机,并在单片机上安装ramps扩展板进行接口扩展,在ramps扩展板上安装a4988驱动模块用来驱动挤出机步进电机,同时连接加热丝和热传感器对喷头的加热块和热床进行闭环温度控制。pc上位机与2560单片机通过串口单向通讯,与ur3机械臂控制箱通过tcp/ip协议双向通讯。
25.如图2和图3所示,挤出机由法兰盘固定装置1通过螺栓与机械臂末端连接,其他主要部件有挤出电机2,小型冷却风扇3为热隔离器4进行散热,防止丝材在热隔离器处提前受热膨胀堵塞挤出机,加热块5熔化进给材料,打印喷头6挤出材料进行打印工作。该挤出机能同时满足常见热塑性材料或纤维增强复合材料的打印。
26.如图4基于机械臂3d打印平台的曲面路径打印流程所示,方法包括如下步骤:
27.步骤1。对输入模型进行扁平化变形处理,扁平化变形算法的输入是模型的四面体网格,如图5(a)所示,输出为变形后的四面体网格以及变形场,通过变形场可以将变形后的模型复原。具体方法如下,使用v表示未变形的初始四面体网格,定义一个映射m为网格v的变形场。将v中每个网格顶点p经过变形后的新位置h(p)存放在变形场m中。这样物体就可以在m或m-1
在原始模型和变形后的模型之间转换。
28.步骤2。如图5(b)所示,对变形后的模型采用平面切片,对切片层进行路径填充,路径填充采用连续费马螺线,生成连续费马螺旋的步骤分为两部分:平行轮廓生成与路径连通。首先,针对每个切片层,从其外轮廓出发,向内进行等距偏置,每次移动距离d,通常与打印喷嘴直径相等,在本设备中为0.4mm。重复上述操作,获得一系列闭合路径。之后,进行路径连通,各层的闭合路径使用树形结构存储,一组闭合路径内可能同时包含数个子区域。为了生成层内连续的路径,依次连接同一分支组内的相邻轮廓和不同分支组之间的相邻轮廓。可以将闭合路径由外而内逐层建立索引,分为奇数圈和偶数圈两部分。随后,找到每层路径中特征变化较小的位置,并在该位置确定一点作为连接相邻轮廓的连接点。最后,在该点断开本层路径,并向内连接相邻的路径,建立连续路径。
29.步骤3。通过路径规划获得的连续费马螺线是常规平面路径。接下来对其做变形处理,将路径转化为打印模型的原始形状,如图5(c)所示。通过之前得到的扁平化变形的位置映射关系,即变形场m。定义扁平化变形操作m的逆映射m-1
,则有v=m-1
(m(v))。通过对已有的平面连续路径进行逆映射m-1
,即得到空间中的曲面连续路径。
30.步骤4。上一步得到的曲面连续路径由三维坐标组成,但机器人的运动控制不仅涉及到末端目标位置,还需要确定目标位置的姿态,在ros中使用四元数表示机器人的姿态。在有弯曲层的情况下,传统的3d打印机挤出方向沿固定轴保持恒定,在高曲率的部位容易发生干涉。当使用机械臂时,可以将装有挤出机的末端与弯曲层的表面法线对齐,这种干涉的情况会大大减少。接下来求解打印路径的法向量信息,具体计算方式如下:
31.对于每层的打印路径,都可以看做一组点云数据,对点云数据集上的每个点的法向量估计,近似于对该点所在邻域组成的表面法线。
32.给定打印路径数据p={p1,p2,
…
,pn},其中n为点云总数,点pi的k阶领域为ni,ni={p1,p2,
…
,pk},pi=(xi,yi,zi),i=1,2,
…
,k。目标函数即使用这k个采样点拟合点pi的切平面ax by cz=d,其中d≥0,a2 b2 c2=1,(a,b,c)代表该平面的一个法向量,d代表平面与原点的偏移量,优化目标是使各点到拟合平面的距离尽可能地小。目标函数j0为:
[0033][0034]
约束条件为:
[0035]
a2 b2 c2=1,即||n||=1
[0036]
将具有该约束地优化函数转化为极值问题的求解,优化函数j为:
[0037][0038]
对未知参数d求偏导数,
[0039][0040][0041]
令将优化函数改写为:
[0042][0043]
分别对a、b、c求偏导数,
[0044][0045][0046][0047]
由上述可知,
[0048][0049][0050]
对s0除以k变为协方差矩阵,则对任意点云数据pi用其k阶领域拟合的协方差矩阵为:
[0051][0052]
s为对称正定矩阵,对s进行特征分解,有3个实特征值λ0≤λ1≤λ2,对应的特征向量
为v0,v1,v2,由上式可知sn=λn,求得,
[0053][0054]
优化的目标函数取最小距离即最后一个等式,所以取最小特征值λ0对应的特征向量v0作为该点pi的法向量。
[0055]
步骤5。已知目标位置的法向量后,下一步将机械臂末端与法向量对齐。在上位机中使用机器人操作系统(robot operating system,ros)对机械臂进行运动控制,ros中使用四元数表示机械臂的姿态,这一步即求解表示该法向量的四元数。已知两个向量向量间的夹角为θ,找到从旋转到的四元数表示。构造一个表示绕轴旋转的四元数,如下所示:
[0056][0057]
在已知的情况下,角度θ由两个向量内积,即点乘求得,
[0058][0059][0060]
向量(x,y,z)是垂直于的轴向法向量,由两个向量外积,即叉乘求得,
[0061][0062]
其中,qw代表四元素的虚部,q
x
、qy、qz代表四元数的三个实部。至此,获得了打印路径上每个点对应的四元数。三维空间坐标与四元数共同控制机械臂末端位姿。
[0063]
步骤6。由于机械臂只控制运动过程,挤出机只控制挤出过程,不同于传统的3d打印机具有高度的集成度,在本平台上需要对两个系统进行同步,以实现良好的打印运动。具体来说,是同步机械臂末端移动速度与挤出机挤出速度。本设备使用的材料是圆柱形管状丝材,挤出机在单位时间内的打印路径可以近似为一个长方体,如图6所示。
[0064]
使用v
in
表示单位时间的送料体积,v
out
表示单位时间内的挤出材料体积。维持单位时间内的体积平衡,则有v
in
=v
out
。体积平衡公式为:
[0065][0066]
其中d表示进给丝材直径,e表示单位时间内的进给长度,l表示单位时间内机械臂末端(即打印喷头)移动距离,w表示打印路径宽度,一般近似于打印喷头直径,h表示层高。
[0067]
使用vr表示机械臂末端移动速度,即打印速度。ve表示挤出机的挤出速度。单位时间内移动速度与移动距离成正比,则:
[0068][0069]
代入上式得到机械臂移动速度与挤出速度的关系:
[0070][0071]
机械臂移动速度可以自由调节,在本平台的打印过程中一般设定为10mm/s,相应的可以确定挤出机挤出速度,通过对应的g代码至2560单片机来控制。
[0072]
步骤7。进行曲面打印实验,模型为马鞍模型。使用本平台进行打印时,层高为0.3mm,打印材料为pla。使用常规3d打印机和相同参数打印对比物体,对比结果如图7(a)、7(b)所示。对比两者的表面特征可以看出,常规3d打印机打印的物体具有明显的阶梯效应,如图7(c)所示,而使用本平台打印的物体得益于曲面路径规划,在整个表面无明显阶梯效应,如图7(d)所示,可以看出使用本平台带来的表面质量上的提升。
[0073]
该基于机械臂3d打印平台的曲面路径规划装置,其中,所述的装置包括:
[0074]
处理器,被配置成执行计算机可执行指令;
[0075]
存储器,存储一个或多个计算机可执行指令,所述计算机可执行指令被所述处理器执行时,实现上述所述的基于机械臂3d打印平台的曲面路径规划方法的各个步骤。
[0076]
该基于机械臂3d打印平台的曲面路径规划的处理器,其中,所述的处理器被配置成执行计算机可执行指令,所述的计算机可执行指令被所述的处理器执行时,实现上述所述的基于机械臂3d打印平台的曲面路径规划方法的各个步骤。
[0077]
该计算机可读存储介质,其中,其上存储有计算机程序,所述的计算机程序可被处理器执行以实现上述所述的基于机械臂3d打印平台的曲面路径规划方法的各个步骤。
[0078]
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本发明的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本发明的实施例所属技术领域的技术人员所理解。
[0079]
应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行装置执行的软件或固件来实现。
[0080]
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成的,程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
[0081]
上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0082]
在本说明书的描述中,参考术语“一实施例”、“一些实施例”、“示例”、“具体示例”、或“实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0083]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例
性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
[0084]
采用了本发明的该基于机械臂3d打印平台的曲面路径规划方法、装置、处理器及其计算机可读存储介质,将工业机器人手臂与挤出机组合在一起,实现一个机械臂3d打印平台,为了发挥多自由度的优势,设计了一种曲面路径规划方法,改善了传统3d打印机打印物体的表面阶梯效应问题。
[0085]
在此说明书中,本发明已参照其特定的实施例作了描述。但是,很显然仍可以作出各种修改和变换而不背离本发明的精神和范围。因此,说明书和附图应被认为是说明性的而非限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
