1.本实用新型属于机械设备领域,更具体而言,涉及一种铆钉自动送料设备。
背景技术:
2.铆钉枪是用于各类金属板材、管材等制造工业的紧固铆接。
3.在实际使用时,铆钉枪一般配备一个自动送料装置,以使铆钉自动输送到铆钉枪的输出端处;
4.在现有技术中,铆钉枪的自动送料装置如发明专利公开号cn112296237a公开的一种能够进行铆钉枪自动上料的装置所示,包括铆钉枪、自动输送机构、铆钉自动上枪机构及动力压差导管;铆钉枪包括枪本体和枪口,自动输送机构包括振动盘、分料轨道和两个分料构件,振动盘内设有螺旋轨道,两个分料构件沿分料轨道的输送方向间隔设置,两个分料构件交替往复运动至分料轨道上,以在一个运动周期内通过一个铆钉;自动上枪机构包括铆钉夹爪组件,在铆钉夹爪组件上设置有能够接收铆钉的铆钉通道;铆钉通道通过动力压差导管与分料轨道相连通以接收单个铆钉,铆钉夹爪组件抓握由铆钉通道落入其内部的铆钉,该铆钉与枪口同轴以将铆钉上料至枪口。
5.在上述方案中,其是通过动力压差导管实现铆钉的送料,适用于尺寸较小的铆钉输送工作;而对于尺寸较大的铆钉而言,由于其比较重,采用压差的方式实现送料,其需要有较大的压力以及较好的密封性;
6.上述方案中,连接孔与动力压差导管是导通的,而连接孔与分料台导通且分料台的顶部设有开口,即,动力压差导管在输送铆钉时,其鼓入的空气也会从连接孔处溢出,密封性能差,难以实现尺寸较大的铆钉的送料工作。
技术实现要素:
7.本实用新型的主要目的在于提供一种铆钉自动送料设备,其在输送铆钉时的密封性能好。
8.根据本实用新型的第一方面,提供了一种铆钉自动送料设备,包括铆钉枪、用于向铆钉枪送料的送料模块以及用于使铆钉附着在铆钉枪输出端上的铆钉上枪机构,所述送料模块包括机架,所述机架上设有一送钉轨道、一承接块、一挡钉杆;
9.所述承接块设有一顶部开放的承料腔,所述承接块的侧边设有与所述承料腔导通的进钉口,所述承接块的底部与一吹气管连接;所述承接块与所述送钉轨道对应,铆钉从所述进钉口处进入承料腔内;所述挡钉杆可延伸至送钉轨道的输出端处用于阻挡铆钉输出;
10.还包括一送钉工位,所述送钉工位包括一送料管、一封堵块,所述送料管的一端与一接头连接,另一端与所述铆钉上枪机构连接;所述封堵块用于封堵所述进钉口;
11.还包括一控制模块、传感器、用于驱动挡钉杆移动的第一驱动装置、用于驱动所述承接块移动到所述接头下方的第二驱动装置、用于驱动所述封堵块插入进钉口的第三驱动装置以及用于驱动所述接头套设在所述承接块的顶部的第四驱动装置,所述传感器用于检
测所述承接块上是否有铆钉;所述传感器、第一驱动装置、第二驱动装置、第三驱动装置、第四驱动装置均与所述控制模块电连接;
12.当承接块移动到所述接头的下方时,所述封堵块、接头使承接块形成与吹气管、送料管导通的密闭空间。
13.本实用新型一个特定的实施例中,所述机架上设有一通孔,所述吹气管穿过所述通孔与所述承接块连接。
14.本实用新型一个特定的实施例中,所述机架上设有一用于导向所述承接块移动的第一直线导轨。
15.本实用新型一个特定的实施例中,所述机架上还设有一限位块,用于限制所述承接块的移动距离;所述限位块设置在所述第一直线导轨的靠近所述接头的一端。
16.本实用新型一个特定的实施例中,所述机架上设有一安装架,所述第四驱动装置设置在所述安装架上用于驱动所述接头升降,所述安装架上还设有一用于导向所述接头升降的第二直线导轨。
17.本实用新型一个特定的实施例中,所述挡钉杆的用于挡料的一端的端部为锥状结构。
18.本实用新型一个特定的实施例中,所述铆钉上枪机构包括第一夹爪、第二夹爪以及设置在所述铆钉枪上的驱动模块,所述驱动模块用于驱动所述第一夹爪、第二夹爪以水平移动的方式开合;
19.所述第一夹爪上设有第一凹腔、第二夹爪上设有第二凹腔,所述送料管与所述第一凹腔导通;所述第一夹爪、第二夹爪闭合时,所述第一凹腔、第二凹腔配合形成用于容纳铆钉的容纳腔,所述容纳腔位于所述铆钉枪的输出端处。
20.本实用新型一个特定的实施例中,所述驱动模块包括与所述铆钉枪固定连接的固定块、可沿着固定块的上侧面移动的第一移动块、可沿着固定块的下侧面移动的第二移动块,所述第一移动块与所述第一夹爪固定连接,所述第二移动块与所述第二夹爪固定连接;所述第一移动块、第二移动块通过一弹性件连接使得第一夹爪、第二夹爪有相互靠近的趋势;
21.还包括一连接块,所述第一移动块、第二移动块滑动连接在所述连接块上,所述连接块通过一第五驱动装置驱动移动使第一夹爪、第二夹爪打开或闭合;
22.所述固定块的上侧面包括第一水平部、第一倾斜部;所述固定块的下侧面包括第二水平部、第二倾斜部;所述第一水平部、第二水平部相互平行,所述第一倾斜部的远离第一水平部的一端、第二倾斜部的远离第二水平部的一端相互靠近;
23.当第一夹爪与第一水平部配合时、第二夹爪与第二水平部配合时,所述第一夹爪、第二夹爪处于打开状态;
24.当第一夹爪与第一倾斜部配合时、第二夹爪与第二倾斜部配合时,所述第一夹爪、第二夹爪处于闭合状态。
25.本实用新型一个特定的实施例中,所述第一移动块、第二移动块均通过滑轮与固定块配合。
26.本实用新型一个特定的实施例中,所述机架上还设有一用于导向所述封堵块移动的第三直线导轨。
27.本实用新型上述技术方案中的一个技术方案至少具有如下优点或有益效果之一:
28.在实际应用中,承接块在送料轨道处承接铆钉,承接到铆钉后的承接块第二驱动装置的驱动下移动到接头的下方,由第三驱动装置驱动封堵块封堵承接口、由第四驱动装置驱动接头套设在承接块的顶部,使得承接块形成与吹气管、送料管导通的密闭空间,此时,通过外设吹气设备吹气,使得铆钉经送料管输送到铆钉上枪机构,结构简单,可保证铆钉输送工作的正常进行;
29.其中,承接块、接头、封堵块配合可保证铆钉输送时的密封性能,使得本实用新型可适用于大尺寸的铆钉的送钉工作。
附图说明
30.下面结合附图和实施例对本实用新型进一步地说明;
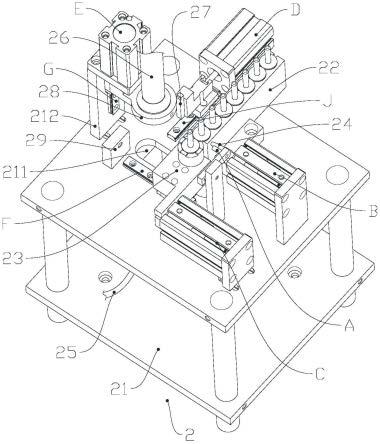
31.图1是本实用新型的实施例1的送料模块的结构图;
32.图2是本实用新型的实施例1的承接块与送钉轨道配合的结构图;
33.图3是本实用新型的实施例1的铆钉枪与铆钉上枪机构配合的结构图;
34.图4是本实用新型的实施例1的铆钉枪与铆钉上枪机构配合的另一个结构图;
35.图5是本实用新型的实施例1的固定块的结构图。
具体实施方式
36.下面详细描述本实用新型的实施方式,实施方式的示例在附图中示出,其中相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
37.实施例1
38.参照图1至图5所示,一种铆钉自动送料设备,包括铆钉枪1、用于向铆钉枪1送料的送料模块2以及用于使铆钉附着在铆钉枪1输出端上的铆钉上枪机构3,所述送料模块2包括机架21,所述机架21上设有一送钉轨道22、一承接块23、一挡钉杆24;
39.所述承接块23设有一顶部开放的承料腔231,所述承接块23的侧边设有与所述承料腔 231导通的进钉口232,所述承接块23的底部与一吹气管25连接;所述承接块23与所述送钉轨道22对应,铆钉从所述进钉口232处进入承料腔231内;所述挡钉杆24可延伸至送钉轨道22的输出端处用于阻挡铆钉输出;
40.还包括一送钉工位,所述送钉工位包括一送料管26、一封堵块27,所述送料管26的一端与一接头28连接,另一端与所述铆钉上枪机构3连接;所述封堵块27用于封堵所述进钉口232;
41.还包括一控制模块(图中未示出)、传感器a、第一驱动装置b、第二驱动装置c、第三驱动装置d以及第四驱动装置e,所述传感器a用于检测所述承接块23上是否有铆钉;所述传感器a与所述控制模块电连接;
42.当传感器a检测到承接块23上有铆钉时,所述控制模块控制第一驱动装置b驱动挡钉杆24延伸至送钉轨道22的输出端处用于阻挡铆钉输出、控制第二驱动装置c驱动所述承接块23移动到所述接头28下方、控制第三驱动装置d驱动所述封堵块27插入进钉口232、控
制第四驱动装置e驱动所述接头28套设在所述承接块23的顶部;
43.在实际应用中,承接块23在送料轨道处承接铆钉,承接到铆钉后的承接块23第二驱动装置c的驱动下移动到接头28的下方,由第三驱动装置d驱动封堵块27封堵承接口、由第四驱动装置e驱动接头28套设在承接块23的顶部,使得承接块23形成与吹气管25、送料管26导通的密闭空间,此时,通过外设吹气设备吹气,使得铆钉经送料管26输送到铆钉上枪机构3,结构简单,可保证铆钉输送工作的正常进行;
44.其中,承接块23、接头28、封堵块27配合可保证铆钉输送时的密封性能,使得本实用新型可适用于大尺寸的铆钉的送钉工作;
45.当完成一次铆钉输送工作后,根据预设程序的设置,由控制模块驱动第一驱动装置b、第二驱动装置c、第三驱动装置d、第四驱动装置e复位,复位后通过重复上述过程以完成下一次的铆钉输送工作;
46.具体来说,所述封堵块27与承接块23配合的地方、接头28与封堵块27配合的地方还可以设置密封件,以进一步保证三者配合的密封性能,本实施例对此不作限制。
47.作为本实施例的具有实现,所述机架21上设有一通孔211,所述吹气管25穿过所述通孔211与所述承接块23连接,结构简单,便于安装;所述通孔211为腰型孔,以提供气管移动的空间。
48.在本实施例中,所述机架21上设有一用于导向所述承接块23移动的第一直线导轨f,保证承接块23移动的稳定性。
49.优选地,所述机架21上还设有一限位块29,用于限制所述承接块23的移动距离;所述限位块29设置在所述第一直线导轨f的靠近所述接头28的一端,通过限位块29的设置可保证承接块23能准确地移动到接头28的下方,保证铆钉输送工作的正常进行。
50.在本实施例中,所述机架21上设有一安装架212,所述第四驱动装置e设置在所述安装架212上用于驱动所述接头28升降,所述安装架212上还设有一用于导向所述接头28升降的第二直线导轨g,以保证接头28升降工作的正常进行。
51.优选地,所述挡钉杆24的用于挡料的一端的端部为锥状结构,起到避让作用,保证挡料工作的正常进行。
52.在本实施例中,所述铆钉上枪机构3包括第一夹爪31、第二夹爪32以及设置在所述铆钉枪1上的驱动模块,所述驱动模块用于驱动所述第一夹爪31、第二夹爪32以水平移动的方式开合;
53.所述第一夹爪31上设有第一凹腔、第二夹爪32上设有第二凹腔,所述送料管26与所述第一凹腔导通;所述第一夹爪31、第二夹爪32闭合时,所述第一凹腔、第二凹腔配合形成用于容纳铆钉的容纳腔,所述容纳腔位于所述铆钉枪1的输出端处;
54.当驱动模块驱动第一夹爪31、第二夹爪32打开时,第一夹爪31、第二夹爪32往铆钉枪 1输出端的后方移动使铆钉附着在铆钉枪1的输出端上;
55.水平移动的方式开合可以增大第一夹爪31、第二夹爪32的后撤距离,使得第一夹爪31、第二夹爪32可以远离铆钉枪1的输出端,使得铆钉枪1在打钉时避免第一夹爪31、第二夹爪32磕碰到外设工件,保证外设工件的表面质量,使得本实施例所述的铆钉枪1可适用于具有一定深度的工件的铆钉安装工作;
56.作为本实施例的具体实现,所述驱动模块包括与所述铆钉枪1固定连接的固定块
33、可沿着固定块33的上侧面移动的第一移动块34、可沿着固定块33的下侧面移动的第二移动块 35,所述第一移动块34与所述第一夹爪31固定连接,所述第二移动块35与所述第二夹爪 32固定连接;所述第一移动块34、第二移动块35通过一弹性件(图中未示出)连接使得第一夹爪31、第二夹爪32有相互靠近的趋势;
57.还包括一连接块36,所述第一移动块34、第二移动块35滑动连接在所述连接块36上,所述连接块36通过一第五驱动装置h驱动移动使第一夹爪31、第二夹爪32打开或闭合;
58.具体来说,所述连接块36设有一滑槽,所述第一移动块34、第二移动块35均滑动连接在所述滑槽内,通过在该滑槽内滑动实现打开或闭合的动作;
59.所述弹性件为拉力弹簧,其设置在第一夹爪31、第二夹爪32之间且设置在滑槽内。
60.所述固定块33的上侧面包括第一水平部331、第一倾斜部332;所述固定块33的下侧面包括第二水平部333、第二倾斜部334;所述第一水平部331、第二水平部333相互平行,所述第一倾斜部332的远离第一水平部331的一端、第二倾斜部334的远离第二水平部333的一端相互靠近;
61.当第一夹爪31与第一水平部331配合时、第二夹爪32与第二水平部333配合时,所述第一夹爪31、第二夹爪32处于打开状态;
62.当第一夹爪31与第一倾斜部332配合时、第二夹爪32与第二倾斜部334配合时,所述第一夹爪31、第二夹爪32处于闭合状态;
63.第五驱动装置h驱动连接块36移动使得第一夹爪31、第二夹爪32在闭合状态、打开状态之间转换。
64.优选地,所述第一移动块34、第二移动块35均通过滑轮i与固定块33配合,提高第一移动块34、第二移动块35的移动性能;
65.具体来说,所述滑轮i为螺栓型轴承。
66.在本实施例中,所述第一驱动装置b、第二驱动装置c、第三驱动装置d、第四驱动装置e、第五驱动装置h均为气缸,所述控制模块通过控制电磁阀的方式实现气缸的控制,即,气缸连接有气管,气管上设有电磁阀,电磁阀与控制模块电连接;
67.吹气管25与外设供气设备连接,吹气管25上同样设置有电磁阀,控制模块与该电磁阀电连接,通过控制电磁阀工作实现吹气工作;
68.所述传感器a为红外传感器a。
69.在实际应用中,可以通过检测铆钉枪1的输出端上是否有铆钉来控制第一驱动装置b、第二驱动装置c、第三驱动装置d、第四驱动装置e、第五驱动装置h是否复位;
70.即,在铆钉枪1上设置检测元件,第一夹爪31、第二夹爪32的闭合状态为初始状态,当检测元件检测到铆钉枪1的输出端有铆钉时,控制模块控制第五驱动装置h驱动第一夹爪 31、第二夹爪32由闭合状态转换成打开状态;
71.当检测元件检测到铆钉枪1的输出端没有铆钉时,控制模块控制第五驱动装置h驱动第一夹爪31、第二夹爪32由打开状态转换成闭合状态,控制模块控制第一驱动装置b、第二驱动装置c、第三驱动装置d、第四驱动装置e、第五驱动装置h复位,铆钉从送钉轨道22 输送到承接块23上使得传感器a检测到承接块23上有铆钉,再由控制模块控制第一驱动装置b、第二驱动装置c、第三驱动装置d、第四驱动装置e、第五驱动装置h工作以完成铆钉输送工作。
72.在本实施例中,所述机架21上还设有一用于导向所述封堵块27移动的第三直线导轨j。
73.尽管已经示出和描述了本实用新型的实施方式,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施方式进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。