1.本公开总体上涉及的领域包括交通工具转向系统。
背景技术:
2.交通工具可能包括转向系统。通常与“自行驾驶交通工具”相关联的自主驾驶和转向系统可以包括电子转向系统,该电子转向系统可以主要依赖于转向角来自主控制交通工具并维持或改变交通工具行驶的方向。
技术实现要素:
3.一种在具有电子转向系统、位置控制模块、电子转向系统齿条力观测器和齿条力观测器交通工具诊断装置的交通工具中使用的方法,其中该方法可以包括测量交通工具的转向角和转向速度;将交通工具的转向角传送给位置控制模块和电子转向系统齿条力观测器;将交通工具的转向速度传送给电子转向系统齿条力观测器;将电子转向系统马达命令传送给电子转向系统齿条力观测器;以及估计齿条力数据并将齿条力数据传送给齿条力观测器交通工具诊断装置;以及确定补偿的目标转向角。
4.一种在具有电子转向系统、位置控制模块、电子转向系统齿条力观测器和齿条力观测器交通工具诊断装置的交通工具中使用的方法,其中该方法可以包括从电子转向系统齿条力观测器接收齿条力数据;接收来自车轮速度传感器模块的交通工具速度数据、来自惯性测量单元模块的交通工具状态数据、来自制动系统模块的交通工具网络数据和来自gps模块的位置数据;分析来自电子转向系统齿条力观测器的齿条力数据、来自车轮速度传感器模块的交通工具速度数据、来自惯性测量单元模块的交通工具状态数据、来自制动系统模块的交通工具网络数据和来自gps模块的位置数据;近似转向偏移诊断数据;将近似的转向偏移诊断数据传送给运动控制模块;从齿条力观测器交通工具诊断模块接收转向偏移诊断数据;以及近似补偿的目标转向角。
5.一种方法可包括提供电子助力转向系统的步骤,电子助力转向系统可包括转向齿条、至少一个车轮、制动系统模块、车轮速度传感器模块、惯性测量单元模块、位置控制模块、运动控制模块、gps模块、电子转向系统齿条力观测器、齿条力观测器交通工具诊断装置、至少一个计算设备、存储计算机可执行组件的存储器、执行存储在存储器中的计算机可执行组件的处理器。计算机可执行组件当由处理器执行时可以执行一种方法,该方法包括接收和分析来自电子转向系统齿条力观测器的齿条力数据、来自车轮速度传感器模块的交通工具速度数据、来自惯性测量单元模块的交通工具状态数据、来自制动系统模块的交通工具网络数据和来自gps模块的位置数据;近似转向偏移诊断数据;将转向偏移诊断数据传送给运动控制模块;近似补偿的目标转向角;将补偿的目标转向角传送给位置控制模块;以及调整至少一个车轮的转向角。
6.根据下文提供的详细描述,本发明范围内的其他说明性变型将变得显而易见。应该理解的是,详细描述和具体示例虽然公开了本发明的变型,但是仅仅是为了说明的目的,
而不是为了限制本发明的范围。
附图说明
7.从详细描述和附图中,将更充分地理解本发明范围内的变型的选择示例,其中:图1描绘了产品的说明性变型,该产品包括电子转向系统,电子转向系统配备有足以执行本文描述的方法中至少一些方法的硬件;图2示出了流程图,该流程图示出了系统的示例过程,该系统能够近似补偿的目标转向角并调整交通工具转向角;和图3示出了说明电子转向系统的流程图,该电子转向系统能够近似补偿的目标转向角并调整交通工具转向角。
具体实施方式
8.以下对变型的描述本质上仅仅是说明性的,并不旨在限制本发明的范围、其应用或用途。
9.如这里所使用的,“交通工具”可以广义地指货运或客运交通工具,汽车,诸如无人机、飞机的飞行器、以及它们的有人驾驶和无人驾驶的变型。
10.如本文所用,“操作环境”可以广义地指道路、高速公路、街道、路径、停车场、停车结构、隧道、桥梁、交通路口、住宅车库或商业车库。预期操作环境可包括交通工具可访问的任何位置或空间。
11.在许多说明性变型中,交通工具可以包括电子转向系统。在这种情况下,转向系统可以由驾驶员经由转向接口手动操作,可由自主转向系统自主操作,或者可作为自主和手动转向的组合操作,其中转向系统被配置为同时接收和解释来自驾驶员、自主转向系统或两者的转向输入。
12.在许多说明性变型中,转向接口可以包括手轮、操纵杆、跟踪球、滑块、油门、按钮、拨动开关、杠杆、触摸屏、鼠标或任何其他已知的用户输入装置。
13.在多个说明性变型中,交通工具可以包括转向系统,该转向系统包括转向接口和可转向推进系统,例如但不限于方向盘、转向齿条和负重轮。转向系统可以是电动助力转向类型,其中物理连杆机构将转向接口的操纵机械地传送给可转向推进系统。转向系统可以是线控转向类型,其中物理机构不将转向接口的操纵机械地传送给可转向推进系统,并且其中转向接口的操纵经由电子设备的通信影响可转向推进系统的相关联操纵,电子设备是例如但不限于传感器、收发器和电子激励致动器。
14.在多个说明性变型中,自主驾驶交通工具中的电子转向系统可以经由可包括多个传感器的运动控制系统影响交通工具的轨迹。多个传感器可以测量和/或观测各种道路行驶因素,例如交通工具速度、车轮速度、车轮角度、偏航率、加速度、侧倾角度、俯仰角度、制动系统活动、全球定位系统(gps)和数据,以及与交通工具行驶相关的其他可测量变量。自主驾驶交通工具中的电子转向系统可以测量转向角位置以确定轨迹。例如,自主驾驶交通工具可以确定转弯的交通工具必须调整转向角“x”度以完成自主转弯。自主驾驶交通工具中的电子转向系统可以测量交通工具转向齿条上的力,或者可以通过齿条力观测器计算转向齿条上的近似力。齿条力观测器可以监测电子转向系统内部相对于电动马达位置的电
流,以近似转向齿条上的力。通过这种方式,可以观测、测量并随后补偿由于源自操作环境的外部影响而导致的齿条力的突然变化。
15.在多个说明性变型中,除了诸如交通工具速度、车轮速度、车轮角度、偏航率、加速度、侧倾角度、俯仰角度、制动系统活动、全球定位系统(gps)和数据以及其他因素之外,具有电子转向系统的交通工具可以测量、观测、收集或近似交通工具转向齿条上的力。与诸如位置控制器、转向齿条力观测器、运动控制器、运动位置传感器、制动系统传感器、惯性测量单元(imu)、gps和各种其他系统的模块相结合的运动控制系统可以测量或近似源自交通工具操作环境的可能影响车轮角度和齿条力的干扰。例如,运动控制系统近似平行于交通工具轨迹测量车轮角度,但也测量或近似大于预期的齿条力,可以确定动态情况,例如不利的驾驶条件、电子转向系统内的组件故障或其他条件。转向齿条力的干扰可以通过监测转向角位置和相对于直位置的转向角补偿来确定,并且可以通过次要交通工具传感器如车轮速度传感器、交通工具航向、偏航率和侧向加速度传感器来确认。
16.测得的转向齿条力连同测得的转向位置可以向交通工具提供大量的信息,这些信息原本可能无法被测量或观测到。当需要交通工具维护时,该系统可以帮助情况识别和诊断。可以识别动态情况,例如在拼合摩擦(split-mu)表面上的制动、油门接通(on-throttle)时的扭矩转向、以高侧向加速度提升车轮、轮胎爆裂以及上/下弧形和拱形路面。悬架和轮胎诊断也可以被识别,例如变坏的球接头、横拉杆端、冲击、制动盘问题、轮胎不平衡和轮胎充气。干扰的原因可以从来自转向角位置(包括补偿)、齿条载荷力的信息中识别,并借助于其他交通工具传感器如车轮速度传感器和侧向加速度。情况识别然后可以被传送到遍布交通工具的系统并由这些系统使用,包括发信号通知根据需要进行维护,调整自主驾驶轨迹或速度,或者当运动控制系统不能时指示驾驶员可能需要调整轨迹或速度。
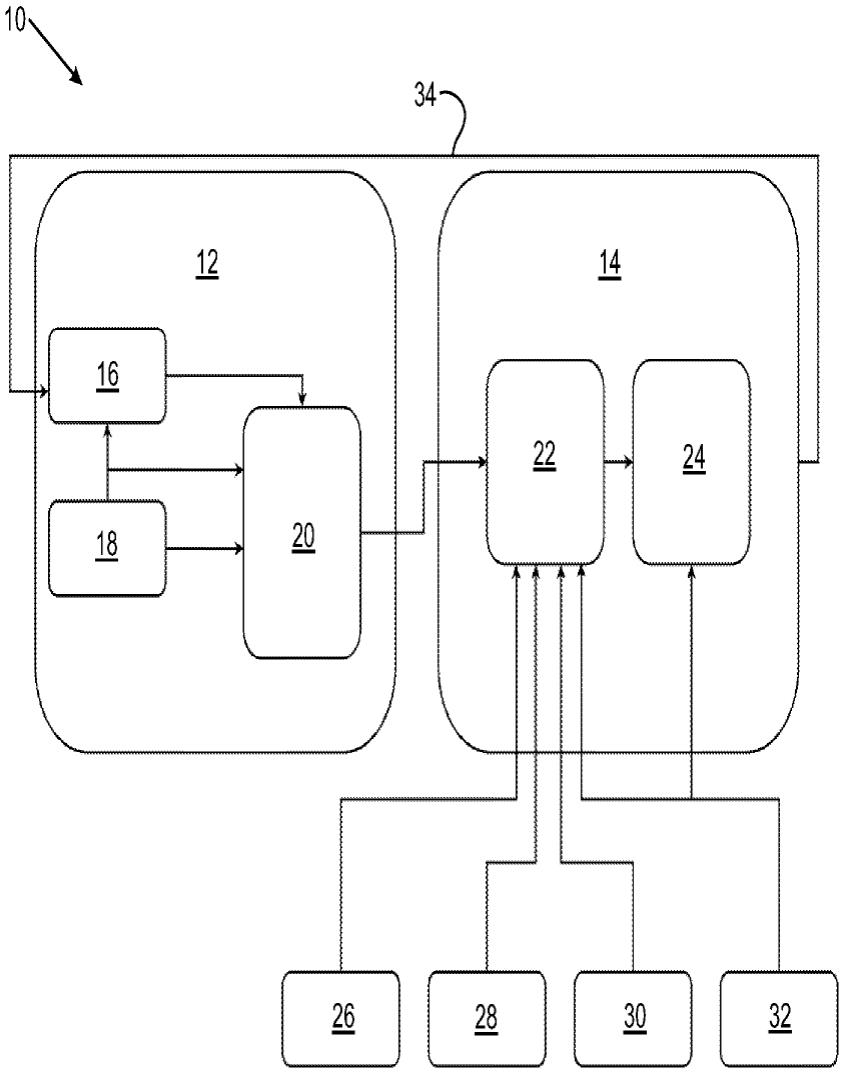
17.参考图1,产品的说明性变型可以包括电子助力转向系统10,该系统包括电子负重轮致动器12和运动控制系统14。运动控制系统14和/或电子助力转向系统可以包括:至少一个计算设备;存储计算机可执行组件的存储器;执行存储在存储器中的计算机可执行组件的处理器。电子负重轮致动器12可以包括位置控制模块16、运动位置传感器18、电子转向齿条力观测器20。运动控制系统14可以包括齿条力观测器交通工具诊断装置22和运动控制器24。
18.运动位置传感器18可以将交通工具的转向角传送给位置控制模块16和电子转向系统齿条力观测器20。运动位置传感器18可以将转向速度传送给电子转向系统齿条力观测器20。位置控制模块16可以将电子转向系统马达命令传送给电子转向系统齿条力观测器20。位置控制模块16可以包括位置控制、扭矩控制或扭矩叠加构架。电子转向系统齿条力观测器20可以测量或估计齿条力数据,并将齿条力传送给运动控制系统14内的齿条力观测器交通工具诊断装置22。
19.在运动控制系统14内,齿条力观测器交通工具诊断装置22可以接收来自电子转向系统齿条力观测器20的齿条力数据、来自车轮速度传感器模块26的交通工具速度数据、来自惯性测量单元模块28的交通工具状态数据、来自制动系统模块30的交通工具网络数据和来自gps模块32的位置数据。齿条力观测器交通工具诊断装置22可以分析来自电子转向系统齿条力观测器20的齿条力数据、来自车轮速度传感器模块26的交通工具速度数据、来自惯性测量单元模块28的交通工具状态数据、来自制动系统模块30的交通工具网络数据和来
自gps模块32的位置数据,以计算或近似转向偏移诊断数据,该转向偏移诊断数据然后可以被传送到运动控制模块24。运动控制模块24可以从齿条力观测器交通工具诊断模块22接收转向偏移诊断数据,并且还可以从gps模块32接收位置数据,以计算或近似补偿的目标转向角34,该补偿的目标转向角34可以被传送到电子转向系统负重轮致动器12内的位置控制模块16。
20.由位置控制模块16接收的补偿目标转向角数据34可用于调整转向角、交通工具速度或其他变量,以增加自主驾驶系统的安全性,发信号通知根据需要进行维护,调整自主驾驶轨迹或速度,或当运动控制系统不能时指示驾驶员可能需要调整轨迹或速度。
21.图2是示出运动控制系统的示例过程的流程图,该运动控制系统包括电子转向系统,该电子转向系统能够近似补偿的目标转向角并调整交通工具转向角。运动控制系统和/或电子助力转向系统可以包括:至少一个计算设备;存储计算机可执行组件的存储器;执行存储在存储器中的计算机可执行组件的处理器,其中计算机可执行组件可以包括步骤。步骤40可以包括测量交通工具的转向角并将该转向角传送给位置控制模块和电子转向系统齿条力观测器。步骤42可以包括测量转向速度并将其传送给电子转向系统齿条力观测器。步骤44可以包括将电子转向系统马达命令传送给电子转向系统齿条力观测器。步骤46可以包括估计齿条力数据,并将齿条力数据传送给齿条力观测器交通工具诊断装置。步骤48可包括调整转向角、交通工具速度或其他变量,以增加自主驾驶交通工具的安全性。步骤48还可以包括向用户发信号通知可能需要维护交通工具,调整自主驾驶轨迹或速度,或者指示驾驶员可能需要调整轨迹或速度。
22.图3是示出运动控制系统的示例过程的流程图,该运动控制系统包括电子转向系统,该电子转向系统能够近似补偿的目标转向角并调整交通工具转向角。运动控制系统和/或电子助力转向系统可以包括:至少一个计算设备;存储计算机可执行组件的存储器;执行存储在存储器中的计算机可执行组件的处理器,其中计算机可执行组件可以包括步骤。步骤50可以包括从电子转向系统齿条力观测器接收齿条力数据。步骤50还可以包括接收来自车轮速度传感器模块的交通工具速度数据、来自惯性测量单元模块的交通工具状态数据、来自制动系统模块的交通工具网络数据和来自gps模块的位置数据。步骤52可以包括分析来自电子转向系统齿条力观测器的齿条力数据、来自车轮速度传感器模块的交通工具速度数据、来自惯性测量单元模块的交通工具状态数据、来自制动系统模块的交通工具网络数据和来自gps模块的位置数据。步骤54可以包括基于在步骤50和步骤52期间接收的数据来近似转向偏移诊断数据。步骤56可以包括将近似的转向偏移诊断数据传送给运动控制模块。步骤58可以包括从齿条力观测器交通工具诊断模块接收转向偏移诊断数据。步骤60可以可选地包括从gps模块接收位置数据,并将位置数据传送给运动控制模块。步骤62可以包括近似补偿的目标转向角、交通工具速度或其他变量。步骤64可包括将补偿的目标转向角传送给电子转向系统内的位置控制模块。步骤66可包括调整转向角、交通工具速度或其他变量,以增加包括电子转向系统的自主驾驶交通工具的安全性。步骤66可以进一步包括发信号通知根据需要进行维护,调整自主驾驶轨迹或速度,或者指示用户可能需要调整轨迹或速度。
23.以下对变型的描述仅是对被认为在本发明范围内的组件、元件、动作、产品和方法的说明,并不以任何方式意图通过具体公开或未明确阐述的内容来限制这样的范围。这里
描述的组件、元件、动作、产品和方法可以被组合和重新排列,而不同于这里明确描述的,并且仍然被认为在本发明的范围内。
24.根据变型1,一种在具有电子转向系统、位置控制模块、电子转向系统齿条力观测器和齿条力观测器交通工具诊断装置的交通工具中使用的方法,其中该方法可以包括测量交通工具的转向角和转向速度;将交通工具的转向角传送给位置控制模块和电子转向系统齿条力观测器;将交通工具的转向速度传送给电子转向系统齿条力观测器;将电子转向系统马达命令传送给电子转向系统齿条力观测器;以及估计齿条力数据并将齿条力数据传送给齿条力观测器交通工具诊断装置;以及确定补偿的目标转向角。
25.变型2可以包括如变型1所述的方法,并且还可以包括调整交通工具的转向角。
26.变型3可以包括如变型1至变型2中任一个所述的方法,并且还可以包括向用户发信号通知需要维护交通工具。
27.变型4可以包括如变型1至3中任一个所述的方法,并且还可以包括向用户发信号通知需要调整驾驶轨迹或速度。
28.变型5可以包括一种在具有电子转向系统、位置控制模块、电子转向系统齿条力观测器和齿条力观测器交通工具诊断装置的交通工具中使用的方法,其中该方法可以包括:接收来自电子转向系统齿条力观测器的齿条力数据;接收来自车轮速度传感器模块的交通工具速度数据、来自惯性测量单元模块的交通工具状态数据、来自制动系统模块的交通工具网络数据和来自gps模块的位置数据;分析来自电子转向系统齿条力观测器的齿条力数据、来自车轮速度传感器模块的交通工具速度数据、来自惯性测量单元模块的交通工具状态数据、来自制动系统模块的交通工具网络数据和来自gps模块的位置数据;近似转向偏移诊断数据;将近似的转向偏移诊断数据传送给运动控制模块;从齿条力观测器交通工具诊断模块接收转向偏移诊断数据;以及近似补偿的目标转向角。
29.变型6可以包括如变型5所述的方法,并且还可以包括从gps模块接收位置数据,并且在接近补偿的目标转向角、交通工具速度或其他变量之前将位置数据传送到运动控制模块。
30.变型7可以包括如变型5至6中任一个所述的方法,并且还可以包括将补偿的目标转向角传送给位置控制模块。
31.变型8可以包括如变型5至7中任一项所述的方法,并且还可以包括调整交通工具的转向角。
32.变型9可以包括如变型5至8中任一个所述的方法,并且还可以包括向用户发信号通知需要维护交通工具。
33.变型10可以包括如变型5至9中任一个所述的方法,并且还可以包括向用户发信号通知需要调整驾驶轨迹或速度。
34.变型11可以包括电子助力转向系统,该电子助力转向系统可以包括转向齿条;至少一个车轮;制动系统模块;车轮速度传感器模块;惯性测量单元模块;位置控制模块;运动控制模块;gps模块;电子转向系统齿条力观测器:齿条力观测器交通工具诊断装置;至少一个计算设备;存储计算机可执行组件的存储器;执行存储在存储器中的计算机可执行组件的处理器。计算机可执行组件当由处理器执行时可以导致以下动作:接收和分析来自电子转向系统齿条力观测器的齿条力数据、来自车轮速度传感器模块的交通工具速度数据、来
自惯性测量单元模块的交通工具状态数据、来自制动系统模块的交通工具网络数据和来自gps模块的位置数据;近似转向偏移诊断数据;将转向偏移诊断数据传送给运动控制模块;近似补偿的目标转向角;将补偿的目标转向角传送给位置控制模块;以及调整至少一个车轮的转向角。
35.本发明范围内的选择变型的上述描述本质上仅仅是说明性的,因此,其变型或变体不应被视为脱离本发明的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。