1.本发明涉及汽车助力转向控制技术领域,具体地涉及一种汽车方向盘中心位置保持的控制方法、一种汽车方向盘中心位置保持的控制装置及一种汽车。
背景技术:
2.电动助力转向系统(electric power steering,eps)可以根据车速信息、驾驶员操舵方向盘的扭矩大小、方向盘转角信息,计算得到助力电机需要提供的助力扭矩,施加到转向执行机构,为驾驶员提供更轻便的转向控制。随着eps控制技术不断发展,为了提高驾驶员驾驶舒适性和驾驶安全性,结合智能驾驶需要,现有eps产品普遍增加了高级功能控制策略,如车道线保持控制(lka)、自适应巡航控制(acc)、车道线偏离预警控制(ldws)等。例如,申请号为cn201810628064.4的发明专利《一种电动助力转向系统的主动回正控制方法及系统》提出一种助力转向系统的回正控制,ecu通过方向盘转矩、转角及车速等输入信号,判断驾驶员的驾驶意图,若判断出方向盘处于自动回正过程,则控制助力电机提供相应助力,使方向盘平稳、快速回到中间位置,但方向盘在中心位置时需要驾驶员不断修正,以维持方向盘中心位置状态,无法对方向盘中间位置保持进行独立的自主扭矩控制。申请号为cn201410144167.5的发明专利《车辆的车道线保持控制装置及其方法》提出了根据摄像头拍摄的图像信息,通过车道识别算法确定车辆在行车道的位置以及前行车道的走向,在车辆偏航时自动施加辅助转向力矩以进行车辆行驶方向的状态保持。
3.但是现有的eps系统存在以下问题:车辆运行时,当驾驶员误操作产生非预期的操舵扭矩,按照现有的控制策略进行助力控制时,车辆会产生非预期的转向,导致车辆偏航角过大,存在安全风险;当车辆方向盘回正到中心位置时,为了保持车辆直线行驶,驾驶员需要不断的对方向盘的操舵角度进行频繁的修正,增加了驾驶员的驾驶强度,降低了驾驶舒适性,容易使驾驶员产生疲劳驾驶;通过车道线保持的控制方法可以实现方向盘中心位置保持的控制,但是实现装置中需要增加视觉传感器进行路况实时采集,成本较高,同时视觉传感器对周围环境和光线情况较为敏感,容易产生误判断,影响驾驶安全性。
技术实现要素:
4.本发明实施方式的目的是提供一种汽车方向盘中心位置保持的控制方法、装置及汽车,以解决现有eps系统缺少对方向盘操舵角度为0度时刻的稳态控制,无法为驾驶员提供基于操舵角度的方向盘中心位置保持的闭环控制的问题。
5.为了实现上述目的,在本发明的第一方面,提供一种汽车方向盘中心位置保持的控制方法,应用于eps系统,所述eps系统包括助力电机,所述助力电机用于向方向盘提供助力力矩以控制方向盘的转动,所述方法包括:
6.获取方向盘的转向角度、方向盘的转向力矩、方向盘的角速度及车速,并依据车速确定车辆的车速变化量;
7.确定所述方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第一条件
以及确定所述车速及所述车速变化量满足第二条件;
8.依据所述方向盘的转向角度确定目标助力力矩并控制所述助力电机输出所述目标助力力矩以使得所述方向盘的转向角度保持在使得车辆直线行驶的角度。
9.可选地,所述方法还包括:
10.当所述方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第三条件,或者所述车速及所述车速变化量满足第四条件时,控制所述助力电机停止输出所述目标助力力矩。
11.可选地,确定所述方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第一条件以及确定所述车速及所述车速变化量满足第二条件之后,所述方法还包括:
12.获取表征车辆故障的故障信息,确定获取到的故障信息满足第五条件;
13.所述第五条件包括:在连续的n个采样时刻中的每一采样时刻均未获取到故障信息。
14.可选地,所述方法还包括:
15.若所述目标助力力矩大于设定阈值,以所述设定阈值作为目标助力力矩。
16.可选地,所述第一条件包括:
17.在连续的n个采样时刻中的每一采样时刻:
18.所述方向盘的转向角度小于第一转向角度、所述方向盘的转向力矩小于第一转向力矩以及所述方向盘的角速度小于第一角速度。
19.可选地,所述第三条件包括:
20.所述方向盘的转向角度大于第二转向角度,或者所述方向盘的转向力矩大于第二转向力矩,或者所述方向盘的角速度大于第二角速度;
21.所述第二转向角度大于所述第一转向角度,所述第二转向力矩大于所述第一转向力矩,所述第二角速度大于所述第一角速度。
22.可选地,所述车速变化量为当前采样时刻的车速与前一采样时刻的车速之差的绝对值,所述第二条件包括:
23.在连续的n个采样时刻中的每一采样时刻:
24.所述车速大于第一车速以及所述车速变化量小于第一车速变化量。
25.可选地,所述第四条件包括:
26.所述车速小于第二车速,或者所述车速变化量大于第二车速变化量;
27.所述第二车速小于所述第一车速,所述第二车速变化量大于所述第一车速变化量。
28.在本发明的第二方面,提供一种汽车方向盘中心位置保持的控制装置,应用上述的汽车方向盘中心位置保持的控制方法,所述装置包括:
29.数据获取模块,被配置为获取方向盘的转向角度、方向盘的转向力矩、方向盘的角速度及车速,并依据车速确定车辆的车速变化量;
30.判断模块,被配置为确定所述方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第一条件以及确定所述车速及所述车速变化量满足第二条件;
31.控制模块,被配置为依据所述方向盘的转向角度确定目标助力力矩并控制所述助力电机输出所述目标助力力矩以使得所述方向盘的转向角度保持在使得车辆直线行驶的
角度。
32.在本发明的第三方面,提供一种汽车,包括上述的汽车方向盘中心位置保持的控制装置。
33.本发明上述技术方案能够基于方向盘的转向角度、方向盘的转向力矩、方向盘的角速度及车速满足预设条件时确定驾驶员的驾驶意图,并能够在确定需要保持车辆直线行驶时依据方向盘的转向角度确定助力电机输出的目标助力力矩,从而维持方向盘中心位置的控制,无需驾驶员频繁修正操舵角度,能有效降低驾驶员的驾驶疲劳度,同时无需额外增加传感设备,且不受环境影响,成本低,可靠性高。
34.本发明实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
35.附图是用来提供对本发明实施方式的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施方式,但并不构成对本发明实施方式的限制。在附图中:
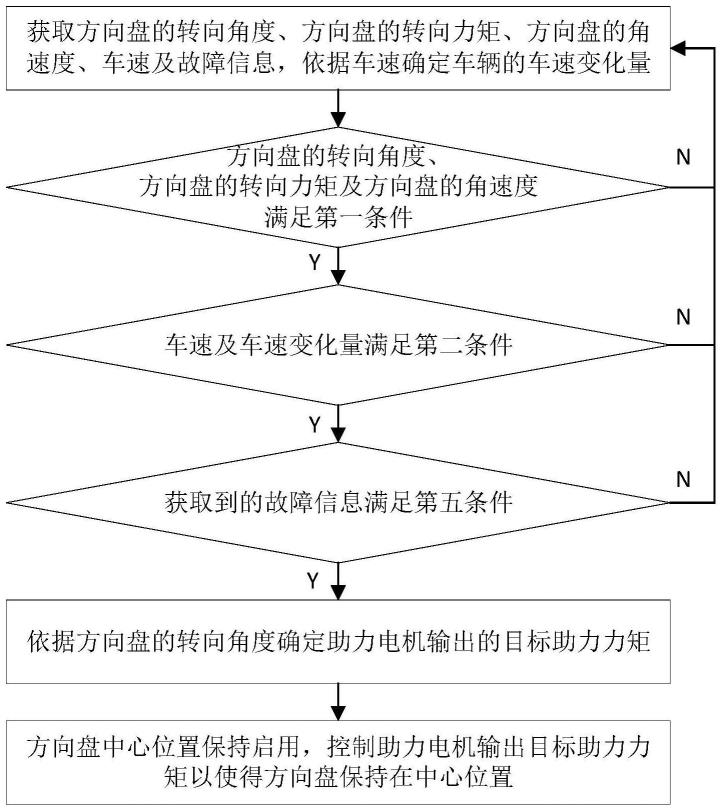
36.图1是本发明优选实施方式提供的一种汽车方向盘中心位置保持的控制方法的方法流程图;
37.图2是本发明优选实施方式提供的方向盘中心位置保持的控制逻辑示意图;
38.图3是本发明优选实施方式提供的驾驶员状态判断流程图;
39.图4是本发明优选实施方式提供的方向盘中心位置闭环控制示意图;
40.图5是本发明优选实施方式提供的一种汽车方向盘中心位置保持的控制装置的示意框图。
具体实施方式
41.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
42.如图1及图2所示,在本实施方式的第一方面,提供一种汽车方向盘中心位置保持的控制方法,应用于eps系统,eps系统包括助力电机,助力电机用于向方向盘提供助力力矩以控制方向盘的转动,方法包括:
43.获取方向盘的转向角度、方向盘的转向力矩、方向盘的角速度及车速,并依据车速确定车辆的车速变化量;确定方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第一条件以及确定车速及车速变化量满足第二条件;依据方向盘的转向角度确定目标助力力矩并控制助力电机输出目标助力力矩以使得方向盘的转向角度保持在使得车辆直线行驶的角度。
44.如此,本实施方式能够基于方向盘的转向角度、方向盘的转向力矩、方向盘的角速度及车速满足预设条件时确定驾驶员的驾驶意图,并能够在确定需要保持车辆直线行驶时依据方向盘的转向角度确定助力电机输出的目标助力力矩,从而维持方向盘中心位置的控制,无需驾驶员频繁修正操舵角度,能有效降低驾驶员的驾驶疲劳度,同时无需额外增加传感设备,且不受环境影响,成本低,可靠性高。
45.具体的,eps系统包括控制器、助力电机及减速机构,控制器与助力电机连接,助力
电机与减速机构连接,减速机构与齿轮齿条组件连接。控制器用于控制助力电机输出力矩,助力电机输出的力矩传递到减速机构,并通过与齿轮齿条组件连接的连杆带动车轮转动,方向盘与齿轮齿条组件连接,从而方向盘转动产生的转向扭矩通过与齿轮齿条组件连接的连杆带动车轮转动。其中,控制器可以为ecu,ecu与力矩传感器、角度传感器、角速度传感器及速度传感器分别连接,力矩传感器用于检测方向盘的转向力矩,角度传感器用于检测方向盘的转向角度,角速度传感器用于检测方向盘的转向速度,速度传感器用于检测车辆的车速。在车辆行驶过程中,实时获取方向盘的转向角度、方向盘的转向力矩、方向盘的角速度及车速,并在每个采样时刻,依据当前车速确定当前的车速变化量,其中,车速变化量为当前采样时刻的车速与前一采样时刻的车速之差的绝对值,例如,当前采样时刻获取到的车速为70km/h,上一采样时刻获取到的车速为68km/h,则当前采样时刻的车速变化量为2km/h。这样,以预设的第一条件及第二条件为约束条件,通过判断方向盘的转向角度、方向盘的转向力矩、方向盘的角速度、车速及车速变化量是否满足第一条件及第二条件,即可确定驾驶员的驾驶意图,当方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第一条件且确定车速及车速变化量满足第二条件时,确定驾驶员需要保持车辆直线行驶,此时控制器依据方向盘的转向角度确定助力电机输出的目标助力力矩并控制助力电机输出目标助力力矩以使得方向盘保持在中心位置从而实现自主维持方向盘中心位置保持的控制,本实施方式中,方向盘的中心位置指方向盘转向角度为0度时的位置。为了避免系统因特殊工况输出超大非预期助力,本实施方式以预先设定的设定阈值构建力矩防火墙,若目标助力力矩大于设定阈值,则以设定阈值作为目标助力力矩。通过预先设定阈值,将助力电机的输出力矩限制在设定阈值内,从而能有效提高系统的容错性。
46.本实施方式中,以第一条件作为判断驾驶员驾驶意图的判断条件,当方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第一条件时,将驾驶员状态标志位置1;以第二条件作为车辆状态的判断条件,例如车辆状态为加速或减速状态,当车速及车速变化量满足第二条件时,将车辆状态监测标志位置1;为了进一步保证在维持方向盘中心位置时的安全性,本实施方式还获取表征车辆故障的故障信息,并当获取到的故障信息满足第五条件时,将故障诊断监测标志位置1;当驾驶员状态标志位、车辆状态监测标志位及障诊断监测标志位均为1时,方向盘中心位置保持启用,系统控制助力电机输出目标助力力矩以自主维持方向盘中心位置;否则,方向盘中心位置保持关闭,系统对方向盘进行常规的eps通用助力控制。
47.如图3所示,第一条件包括:在连续的n个采样时刻中的每一采样时刻:方向盘的转向角度小于第一转向角度、方向盘的转向力矩小于第一转向力矩以及方向盘的角速度小于第一角速度。本实施方式中,第一转向角度、第一转向力矩、第一角速度及连续采样时刻可根据实际情况设定,例如,第一转向角度可以为2deg,第一转向力矩可以为0.5nm,第一角速度可以为0.5rad/s,n可以为100;当在100个连续采样时刻中的每一时刻同时满足方向盘的转向角度小于2deg、方向盘的转向力矩小于0.5nm及方向盘的角速度小于0.5rad/s时,判断驾驶员的驾驶意图为需要保持车辆直线行驶,即此时需要维持方向盘中心位置的保持。在任一采样时刻,当方向盘的转向角度小于2deg、方向盘的转向力矩小于0.5nm及方向盘的角速度小于0.5rad/s三个条件均满足时,令驾驶员状态计数器加1,否则,驾驶员状态计数器清零,则当驾驶员状态计数器值不小于100时,判断驾驶员状态标志位有效并将驾驶员状态
标志位置1,否则,判断驾驶员状态标志位无效并将驾驶员状态标志位置0。例如,在采样时刻1~采样时刻89中的每一采样时刻,均满足方向盘的转向角度小于2deg、方向盘的转向力矩小于0.5nm及方向盘的角速度小于0.5rad/s三个条件,此时驾驶员状态计数器值为89,若在采样时刻90,方向盘的转向角度小于2deg、方向盘的转向力矩小于0.5nm及方向盘的角速度小于0.5rad/s三个条件中的任一条件不满足,如方向盘的转向角度大于2deg,则将驾驶员状态计数器清零,此时驾驶员状态计数器值为0。
48.当系统处于方向盘中心位置保持状态时,还需实时判断方向盘的转向角度、方向盘的转向力矩及方向盘的角速度是否满足第三条件,当方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第三条件时,方向盘中心位置保持关闭,系统控制助力电机停止输出目标助力力矩。
49.其中,第三条件包括:方向盘的转向角度大于第二转向角度,或者方向盘的转向力矩大于第二转向力矩,或者方向盘的角速度大于第二角速度;第二转向角度大于第一转向角度,第二转向力矩大于第一转向力矩,第二角速度大于第一角速度。第二转向角度、第二转向力矩、第二角速度可根据实际情况设定,例如,第二转向角度可以为5deg,第二转向力矩可以为0.8nm,第二角速度可以为0.8rad/s。当方向盘的转向角度大于5deg,或者方向盘的转向力矩大于0.8nm,又或者方向盘的角速度大于0.8rad/s时,判断驾驶员有意操舵方向盘,例如进行转向、掉头等操作,此时,方向盘中心位置保持关闭,助力电机停止输出目标助力力矩,不再对方向盘中心位置保持进行控制。
50.其中,第二条件包括:在连续的n个采样时刻中的每一采样时刻:车速大于第一车速以及车速变化量小于第一车速变化量。本实施方式中,第一车速、第一车速变化量及及连续采样时刻可根据实际情况设定,例如,第一车速为80km/h,第一车速变化量为5km/h,n为100;在100个连续采样时刻中的每一时刻同时满足车速大于80km/h及车速变化量小于5km/h时,判断驾驶员的驾驶意图为需要保持车辆直线行驶,即此时需要维持方向盘中心位置的保持。在任一采样时刻,当车速大于80km/h及车速变化量小于5km/h两个条件均满足时,令车辆状态监测计数器加1,否则,车辆状态监测计数器清零,则当车辆状态监测计数器值不小于100时,判断车辆状态监测标志位有效并将驾驶员状态标志位置1,否则,判断车辆状态监测标志位无效并将车辆状态监测标志位置0。
51.同理,当系统处于方向盘中心位置保持状态时,还需实时判断车速及车速变化量是否满足第四条件,当车速及车速变化量满足第四条件时,方向盘中心位置保持关闭,系统控制助力电机停止输出目标助力力矩。
52.其中,第四条件包括:车速小于第二车速,或者车速变化量大于第二车速变化量;第二车速小于第一车速,第二车速变化量大于第一车速变化量。第二车速及第二车速变化量可根据实际情况设定,例如,第二车速为60km/h,第二车速变化量为10km/h。当车速小于60km/h,或者车速变化量大于10km/h时,判断驾驶员有意接管对方向盘的转向控制,例如,进入加速或减速状态,此时向盘中心位置保持关闭,助力电机停止输出目标助力力矩,不再对方向盘中心位置保持进行控制。
53.本实施方式中,故障信息包括车辆的有效故障标志位及车辆的诊断故障码即dtc,其中,车辆的有效故障标志位包括但不限于表示大灯故障的大灯故障标志位、表示胎压故障的胎压故障标志位及表示发动机故障的发动机故障标志位等车辆现有的常规故障状态
信息,例如,当大灯故障标志位为1时,判断大灯故障标志位为有效故障标志位,当大灯故障标志位为0时,判断大灯故障标志位为无效故障标志位。第五条件包括:在连续的n个采样时刻中的每一采样时刻均未获取到故障信息,n可以为100。在任一采样时刻,若均未获取到故障信息,则故障诊断监测计数器加1,否则清零。当在100个连续采样时刻中的每一时刻均未获取到车辆的故障标志位或诊断故障码时,判断故障诊断监测标志位有效并将故障诊断监测标志位置1,否则,判断故障诊断监测标志位无效并将故障诊断监测标志位置0。可以理解的,本实施方式中,未获取到故障信息即未获取到有效故障标志位,如获取到的故障标志位位0时认为未获取到有效故障标志位,以及诊断故障码不存在;当故障标志位为0时表明车辆系统内部各组件无故障报告,当诊断故障码不存在时,表明车辆正常运行。
54.本实施方式以驾驶员状态标志位、车辆状态监测标志位和故障诊断监测标志位作为输入信号建立模式选择状态机,通过设定的判决条件,利用模式选择状态机实现对系统运行的模式选择。当驾驶员状态标志位、车辆状态监测标志位和故障诊断监测标志位全部有效的条件下,系统选择进入方向盘状态保持控制模式,通过助力电机提供自主的方向盘中心位置保持力矩,否则,系统进入常规的eps通用助力模式。如图4所示,本实施方式以方向盘中心位置0度作为目标角度,以方向盘实际转角为反馈信号,通过控制器建立转角闭环控制得到电机的目标助力力矩,并控制助力电机进行自主力矩保持。
55.其中,转角闭环控制公式如下:
[0056][0057]
t
motor_return
为助力电机的目标助力力矩,k
p
为比例系数,ki为积分系数,kd为微分系数,s为s域。通过闭环反馈控制,能有效的使方向盘中心位置稳定在0度附近,有效提升驾驶员的操舵手感。由于在方向盘中心位置保持控制状态下,助力电机输出的力矩值波动范围很小,故为了提高系统的容错性,本实施方式通过对闭环控制计算得到的目标助力力矩进行限幅,构建力矩防火墙,将限幅后的力矩作为电机最终输出的助力力矩并控制转向机构维持方向盘中心位置的保持,保证输出的力矩在安全可控范围内,从而避免了因故障引起的非预期范围内的电机助力力矩对系统进行干扰,造成安全隐患。
[0058]
如图5所示,在本发明的第二方面,提供一种汽车方向盘中心位置保持的控制装置,应用上述的汽车方向盘中心位置保持的控制方法,装置包括:
[0059]
数据获取模块,被配置为获取方向盘的转向角度、方向盘的转向力矩、方向盘的角速度及车速,并依据车速确定车辆的车速变化量;
[0060]
判断模块,被配置为确定方向盘的转向角度、方向盘的转向力矩及方向盘的角速度满足第一条件以及确定车速及车速变化量满足第二条件;
[0061]
控制模块,被配置为依据方向盘的转向角度确定目标助力力矩并控制助力电机输出目标助力力矩以使得方向盘的转向角度保持在使得车辆直线行驶的角度。
[0062]
在本发明的第三方面,提供一种汽车,包括上述的汽车方向盘中心位置保持的控制装置。
[0063]
综上所述,本实施方式能够基于方向盘的转向角度、方向盘的转向力矩、方向盘的角速度及车速满足预设条件时确定驾驶员的驾驶意图,并能够在确定需要保持车辆直线行驶时依据方向盘的转向角度确定助力电机输出的目标助力力矩,从而维持方向盘中心位置
的控制,无需驾驶员频繁修正操舵角度,能有效降低驾驶员的驾驶疲劳度,同时无需额外增加传感设备,且不受环境影响,成本低,可靠性高。
[0064]
以上结合附图详细描述了本发明的可选实施方式,但是,本发明实施方式并不限于上述实施方式中的具体细节,在本发明实施方式的技术构思范围内,可以对本发明实施方式的技术方案进行多种简单变型,这些简单变型均属于本发明实施方式的保护范围。
[0065]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明实施方式对各种可能的组合方式不再另行说明。
[0066]
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明实施方式的思想,同样应当视为本发明实施方式所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
