一种基于pcc的大型机械臂实时数据传输控制方法
技术领域
1.本发明属于机械臂式运动模拟支撑设备控制技术,具体为一种基于pcc(可编程计算机控制器)的大型机械臂实时数据传输控制方法。
背景技术:
2.机械臂式运动模拟支撑设备在其末端平台上装有目标模拟器和干扰模拟器功放和喇叭天线,根据系统主控机提供的航迹信息解算出机械臂的运动数据,引导机械臂运动,模拟飞行器运行轨迹。根据所需模拟的航迹需求,可以由多个机械臂站联合运动生成完整的飞行器运行轨迹,机械臂站分布在相应不同的位置上,距离可能较远,数量可能较多。由于机械臂控制设备无法存储完整的航迹文件,当模拟运动时,就需要上位机遥控设备实时的发送各机械臂站每轴的运动引导数据。上位机发送数据方式和下位机数据存储方式不当都会导致机械臂无法精确稳定的运动。
技术实现要素:
3.本发明提供一种基于pcc的大型机械臂实时数据传输控制方法。
4.实现本发明目的的技术方案如下:一种基于pcc的大型机械臂实时数据传输控制方法,包括:
5.步骤1:上位机预先通过ftp从系统主控计算机读取模拟航迹信息文件,解算生成各机械臂站每轴相对应的带时戳的引导角度文件并存储下来;
6.步骤2:模拟航路运动时,遥控设备通过模块扩展光纤接口发送引导数据,根据统一发送的同步脉冲作为计数基准;
7.步骤3:机械臂运行初始化状态时,遥控设备实时读取引导角度文件的前m组数据并发送给机械臂站控制器;
8.步骤4:运行正式开始后,以同步脉冲计数,当机械臂运动到第一设定点时,读取第m 1-2m组数据并发送;
9.步骤5:重复步3~4完成引导数据发送;
10.步骤6:机械臂站接收到数据后,存储至数组中,机械臂运行至第一设定点时,更新数组中的后50个点,机械臂运行至第二设定点时,更新数组中的前50个点。
11.优选地,所述模拟航迹信息文件包括序号和飞行器的wgs84航迹坐标。
12.优选地,位机预先解算生成各机械臂站每轴相对应的带时戳的引导角度文件的具体方法为:根据接收器天线阵面中心在大地坐标系下的经度、纬度,将飞行器航迹坐标转换到以接收器天线阵面中心为原点的东北天直角坐标系下的坐标,再转换得到以接收器天线阵面中心为原点,机械臂摆放位置为x轴坐标系下飞行器坐标,经过解算生成各机械臂站每轴相对应的带序号的引导角度文件。
13.优选地,m的取值为100。
14.优选地,每一组数据包括序号和各轴引导角度。
15.优选地,第一设定点为第10个点。
16.优选地,第二设定点为第60个点。
17.优选地,步骤6中的数组为100位数组。
18.本发明与现有技术相比,其显著优点为:本发明解决了在机械臂站无法存储数据、带宽不高的情况下传输大量数据实现对机械臂站实时控制的问题,减轻航路模拟时对cpu资源的需求,避免了数据更新时错误引导机械臂的情况,提高了系统的动态精度。
附图说明
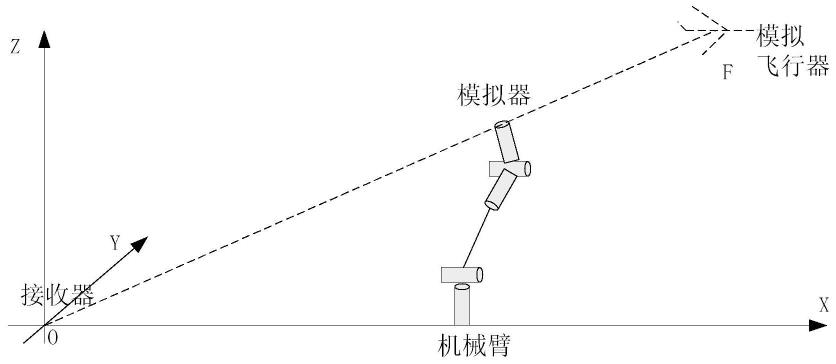
19.图1为机械臂工作状态示意图。
20.图2为遥控设备和机械臂站结构图。
21.图3为数据传输控制流程图。
具体实施方式
22.作为一种发明构思,一种基于pcc的大型机械臂实时数据传输控制方法,适用于一台遥控装置和多个机械臂站,在机械臂站不具备存储功能的情况下,利用上位机遥控设备预先读取需要机械臂模拟姿态的文件数据,解算生成机械臂本体上各轴对应的角度文件并存储下来,避免航路模拟时解算数据占用cpu资源。在实际模拟航路运动时通过提前发送、错位更新,实现实时控制机械臂各轴,避免数据更新时错误引导机械臂的情况。
23.上位机遥控设备为触摸屏,预先通过ftp从系统主控计算机读取模拟航迹信息文件,解算生成各机械臂站每轴相对应的带时戳的引导角度文件并存储下来。模拟航路运动时,遥控设备通过模块扩展光纤接口发送引导数据给机械臂站,如图2,根据系统统一发送的同步脉冲作为计数基准。机械臂运行初始化状态时,遥控设备实时读取引导角度文件的0-100组数据并发送给机械臂站控制器,每一组数据包括序号和各轴引导角度。运行正式开始后,以同步脉冲计数,判断机械臂运动到第10个点时,读取第101-200组数据并发送,以此类推,保证提前将引导数据发送。机械臂站接收到数据后,存储至100位的数组中,机械臂运行至第10个点时,更新数组中的后50个点,机械臂运行至第60个点时,更新数组中的前50个点,保证不会发生在机械臂运动至新数组的第1个点时数据未及时更新导致错误引导。
24.作为一种实施例,一种基于pcc的大型机械臂实时数据传输控制方法,具体步骤为:
25.1、上位机遥控设备为触摸屏,型号espp1120.1043,预先通过ftp(网络文件传输协议)从系统主控计算机读取模拟航迹信息文件,航迹信息文件包括序号和飞行器的wgs84航迹坐标,根据接收器天线阵面中心在大地坐标系下的经度、纬度,将飞行器航迹坐标转换到以接收器天线阵面中心为原点的东北天直角坐标系下的坐标,再转换得到以接收器天线阵面中心为原点,机械臂摆放位置为x轴坐标系下飞行器坐标,坐标系位置如图1所示。最终经过解算生成各机械臂站每轴相对应的带序号的引导角度文件并存储下来。
26.2、模拟航路运动时,遥控设备通过x20bc8083模块扩展光纤接口发送,以powerlink协议发送数据,根据系统统一发送的20ms同步脉冲作为计数基准。机械臂运行初始化状态时,遥控设备依次读取引导角度文件的1-100组数据并发送给机械臂站控制器,每次读取发送一组,每一组数据包括序号sendvalue[0]、角度1sendvalue[1]、角度
2sendvalue[2]、角度3sendvalue[3]、角度4sendvalue[4]、角度5sendvalue[5]共6个数据。运行正式开始后,以20ms同步脉冲计数,判断机械臂运动到第10个点时,依次读取第101-200组数据并依次发送。以此类推,保证提前将引导数据发送。
[0027]
3、机械臂站接收到组数据后,按照数据定义分别存储至6个100位的接收数组中,分别为序号recenum[1-100]、角度1receangle1[1-100]、角度2receangle2[1-100]、角度3receangle3[1-100]、角度4receangle4[1-100]和角度5receangle5[1-100]。最终机械臂使用的引导数组为序号num[1-100]、角度1angle1[1-100]、角度2angle2[1-100]、角度3angle3[1-100]、角度4angle4[1-100]和角度5angle5[1-100]。初始化时直接将6个接收数组的1-100位分别赋值给引导数组,运行时根据20ms同步脉冲计数判断,当机械臂运行至第60个点时,更新6个引导数组中的前50个点,运行至第下100组数据的第10个点时,更新引导数组中的后50个点,以此类推,保证不会发生因数据未及时更新导致错误引导。读取发送接收数据流程如图3。
[0028]
本发明中,机械臂站不具备存储文件的功能,上位机遥控设备预先读取模拟航迹信息文件,解算生成机械臂本体上各轴对应的引导角度文件并存储,减轻航路模拟时解算数据对cpu资源的占用。在实际模拟航路时,判断系统同步脉冲作为计数,遥控设备提前将引导数据读取发送,机械臂站错位存储至引导数组,实现实时控制机械臂各轴,避免数据更新时错误引导机械臂的情况。解决了在机械臂站无法存储数据、带宽不高的情况下传输大量数据实现对机械臂站实时控制的问题,提高了系统的动态精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
