1.本发明涉及机械设备技术领域,具体涉及一种用于工业机器人的柔性抓取装置。
背景技术:
2.现今工业产业生产中大量采用工业机器人,采用工业机器人会大幅提高生产率。工业机器人是一种依靠自身的动力能源和控制能力实现各种工业加工制造的工业生产设备,被广泛用于电子、物流、化工等各个工业领域。在物流领域,有时需要使用工业机器人转运一些外形差异较大的易碎品。
3.现有的工业机器人用抓取装置,大都包括液压手抓、液控回路和电源装置,液压手抓连接于机器人的机械臂上,通过液控回路控制液压手抓动作进而控制整个手抓进行抓取,但现有的工业机器人用抓取装置在对外形差异较大的易碎品进行抓取时,由于易碎品与液压手抓的接触面积较小,导致抓取装置向易碎品施加的夹紧力过于集中,进而容易导致易碎品损坏。
技术实现要素:
4.本发明的目的是为了克服现有技术中的问题,提供一种用于工业机器人的柔性抓取装置,在对易碎品进行夹紧时,不仅能有效防止夹紧力过大将易碎品夹碎,还能在对不同外形的易碎品进行夹持时,保证易碎品表面均匀受力,防止夹紧力过于集中导致易碎品损坏。
5.本发明提供了一种用于工业机器人的柔性抓取装置,包括液压手抓、液控回路和电源装置,还包括:
6.壳体,连接于所述液压手抓上,壳体内腔与连通有气控回路,所述气控回路设有气压传感器,气压传感器用于检测壳体内腔的实时气压值;
7.壳盖,连接于壳体上,壳盖上设有多个台阶通孔,每个台阶通孔均与壳体内腔连通,每个台阶通孔内均密封滑动连接有一个夹紧活塞,每个夹紧活塞上均连接有一个夹块;
8.控制器,与所述气压传感器、液控回路、气控回路和电源装置均电连接,控制器收集所检测到的气压值信号并根据实时气压值控制液控回路动作。
9.较佳地,所述液压手抓包括安装板、连接板、活塞缸和两个手抓机构,所述安装板连接于所述机械臂上,所述安装板上设有滑孔,所述活塞缸的缸体连接于安装板上,活塞缸的活塞杆穿过所述滑孔与所述连接板固连,缸体的与所述液控回路连通,两个手抓机构连接于安装板上,两个手抓机构相对设置,每个手抓机构均包括连杆和平行四边形机构,所述连杆一端与安装板连接,所述平行四边形机构的第一对平行杆与连杆另一端铰接,平行四边形机构的第二对平行杆与连杆相平行,第二对平行杆中的一个杆体与所述壳体固连,第二对平行杆中的另一个杆体与所述连接板滑动连接。
10.较佳地,所述连接板与第二对平行杆的杆体之间还设有t形块,连接板上设有t型滑轨,所述所述t形块与t型滑轨滑动连接,t形块与第二对平行杆的杆体固连。
11.较佳地,所述台阶通孔内夹紧活塞上设有弹簧,所述弹簧用于向夹紧活塞施加弹力以使夹紧活塞收进台阶通孔内。
12.较佳地,还包括橡胶套,所述橡胶套套接在壳体上的多个夹块外。
13.较佳地,所述橡胶套的外侧面设有棘皮纹理。
14.较佳地,所述壳盖上的多个台阶通孔成矩阵式排列。
15.与现有技术相比,本发明的有益效果是:本发明的一种用于工业机器人的柔性抓取装置,在对易碎品进行夹紧时,不仅能有效防止夹紧力过大将易碎品夹碎,还能在对不同外形的易碎品进行夹持时,保证易碎品表面均匀受力,防止夹紧力过于集中导致易碎品损坏。本装置的液压手抓在进行夹持操作时,当壳体内腔的实时气压值大于预设最高气压阈值时,液压手抓能及时停止收紧并稳定夹持。通过设置t形块和t型滑轨,从而使杆体既能在连接板上相对滑行,还能使连接板带动连杆运动,从而保证本装置的正常运行。通过设置弹簧,在本装置不进行夹取操作时,防止夹紧活塞在机械臂转动时发生晃动,进而在机械臂转动时降低本装置的噪音。通过将多个台阶通孔在壳盖上设置成矩阵式排列,从而使本装置的液压夹紧机构能够适应不同外形的易碎品,从而提升本装置的适用范围。通过在橡胶套的外侧面设置棘皮纹理,能够提升橡胶套的摩擦力,提升本装置夹持的牢固程度。
附图说明
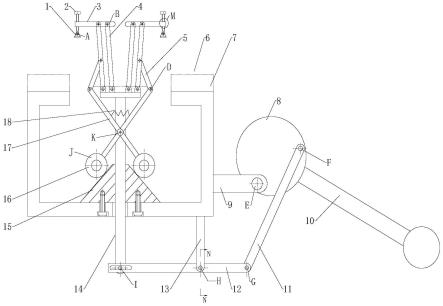
16.图1为本发明的结构示意图;
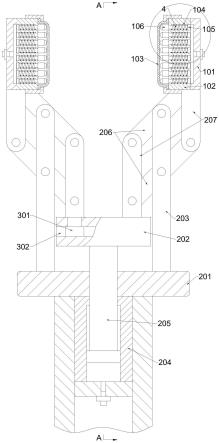
17.图2为本发明的a-a面结构示意图;
18.图3为本发明液压夹紧机构的结构示意图。
19.附图标记说明:
20.101.壳体,102.壳盖,103.橡胶套,104.台阶通孔,105.夹紧活塞,106.夹块,201.安装板,202.连接板,203.连杆,204.缸体,205.活塞杆,206.第一对平行杆,207.第二对平行杆,301.t形块,302.t型滑轨,4.弹簧。
具体实施方式
21.下面结合附图1-3,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.实施例1:
23.如图1-3所示,本发明提供的一种用于工业机器人的柔性抓取装置,包括液压手抓、液控回路和电源装置,还包括:壳体101、壳盖102和控制器,壳体101连接于所述液压手抓上,壳体101内腔与连通有气控回路,所述气控回路设有气压传感器,气压传感器用于检测壳体101内腔的实时气压值;壳盖102连接于壳体101上,壳盖102上设有多个台阶通孔104,每个台阶通孔104均与壳体101内腔连通,每个台阶通孔104内均密封滑动连接有一个夹紧活塞105,每个夹紧活塞105上均连接有一个夹块106;控制器与所述气压传感器、液控回路、气控回路和电源装置均电连接,控制器收集所检测到的气压值信号并根据实时气压值控制液控回路动作。
24.现简述实施例1的工作原理:
25.在进行易碎品夹取时,通过液控回路控制液压手抓打开,通过气控回路向壳体101内腔充气,气体推动所述夹紧活塞105相对于台阶通孔104滑动,夹紧活塞105向通孔外滑动,直至台阶通孔104的台阶面与夹紧活塞105的活塞头接触,夹紧活塞105停止滑动,通过控制器关闭气控回路,从而将壳体101内腔进行保压,此时气压传感器所检测的壳体101内腔的气压值恒定。夹紧活塞105上连接的夹块106被顶起,通过机械臂将液压手抓移动至易碎品处,通过液控回路控制液压手抓收紧,液压手抓对易碎品施加夹紧力,从而进行易碎品夹取。当夹块106与易碎品相接触时,易碎品向夹块106施加反作用力,反作用力推动夹紧活塞105向台阶通孔104内运动,壳体101内腔的气压值逐渐升高,控制器内预设最高气压阈值,当壳体101内腔的实时气压值大于预设最高气压阈值时,控制器控制液控回路关闭,从而截断液孔回路,液压手抓不再继续收紧,从而完成对易碎品的加持操作。更进一步,通过设置多个台阶通孔104,通过多个夹紧活塞105对易碎品进行加持,由于多个台阶通孔104均与壳体101内腔连通,当每个夹紧活塞105的受压面积相等时,每个夹紧活塞105所受的液压力相同,因此,多个夹紧活塞105由于易碎品的外形的不同从而从台阶通孔104内伸出的长度不同,且每个夹紧活塞105对易碎品的加持力均相同,从而保证每个夹紧活塞105都能通过夹块106与易碎品接触,使得易碎品表面均匀受力,可将较大的夹紧力均匀的施加与易碎品表面,有效的防止夹紧力过于集中导致易碎品损坏。
26.本发明的一种用于工业机器人的柔性抓取装置,在对易碎品进行夹紧时,不仅能有效防止夹紧力过大将易碎品夹碎,还能在对不同外形的易碎品进行夹持时,保证易碎品表面均匀受力,防止夹紧力过于集中导致易碎品损坏。
27.实施例2:
28.在实施例1的基础上,为了在壳体101内腔的实时气压值大于预设最高气压阈值时,液压手抓能及时停止收紧并稳定夹持。
29.如图1和2所示,其中,所述液压手抓包括安装板201、连接板202、活塞缸和两个手抓机构,所述安装板201连接于所述机械臂上,所述安装板201上设有滑孔,所述活塞缸的缸体204连接于安装板201上,活塞缸的活塞杆205穿过所述滑孔与所述连接板202固连,缸体204的与所述液控回路连通,两个手抓机构连接于安装板201上,两个手抓机构相对设置,每个手抓机构均包括连杆203和平行四边形机构,所述连杆203一端与安装板201连接,所述平行四边形机构的第一对平行杆206与连杆203另一端铰接,平行四边形机构的第二对平行杆207与连杆203相平行,第二对平行杆207中的一个杆体与所述壳体101固连,第二对平行杆207中的另一个杆体与所述连接板202滑动连接。
30.在进行易碎品夹取时,先将液压手抓张开,通过液控回路向缸体204内输入液压油,液压油推动活塞杆205向缸体204外运动,活塞杆205推动连接板202运动,连接板202推动两个手抓机构的第二对平行杆207中与连接板202相连的两个杆体运动相互靠近,由于平行四边形机构的运动特性,两个第二对平行杆207的另两个杆体相互远离,从而完成手抓张开操作;然后进行夹持,通过液控回路向从缸体204内抽出液压油,活塞杆205向缸体204内运动,活塞杆205拉动连接板202运动,连接板202拉动两个手抓机构的第二对平行杆207中与连接板202相连的两个杆体运动相互远离,由于平行四边形机构的运动特性,两个第二对平行杆207的另两个杆体相互靠近,从而进行夹持操作,当液压夹紧机构的壳体101内腔的实时气压值大于预设最高气压阈值时,控制器控制液控回路关闭,从而截断液孔回路,液压
手抓能及时停止收紧并稳定夹持。
31.作为一种优选方案,如图1和2所示,其中,所述连接板202与第二对平行杆207的杆体之间还设有t形块301,连接板202上设有t型滑轨302,所述所述t形块301与t型滑轨302滑动连接,t形块301与第二对平行杆207的杆体固连。通过设置t形块301和t型滑轨302,从而使杆体既能在连接板202上相对滑行,还能使连接板202带动连杆203运动,从而保证本装置的正常运行。
32.作为一种优选方案,如图3所示,其中,所述台阶通孔104内夹紧活塞105上设有弹簧4,所述弹簧4用于向夹紧活塞105施加弹力以使夹紧活塞105收进台阶通孔104内。通过设置弹簧4,能够在壳体101内腔不充气时,利用弹簧4弹力将夹紧活塞105收进台阶通孔104内,进而在本装置不进行夹取操作时,防止夹紧活塞105在机械臂转动时发生晃动,进而在机械臂转动时降低本装置的噪音。
33.作为一种优选方案,其中,还包括橡胶套103,所述橡胶套103套接在壳体101上的多个夹块106外。通过设置橡胶套103,不仅能起到缓冲作用,还能防止夹块106将易碎品刮花。
34.作为一种优选方案,其中,所述橡胶套103的外侧面设有棘皮纹理。通过在橡胶套103的外侧面设置棘皮纹理,能够提升橡胶套103的摩擦力,提升本装置夹持的牢固程度。
35.作为一种优选方案,其中,所述壳盖102上的多个台阶通孔104成矩阵式排列。通过将多个台阶通孔104在壳盖102上设置成矩阵式排列,从而使本装置的液压夹紧机构能够适应不同外形的易碎品,从而提升本装置的适用范围。
36.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。