模型预测
背景技术:
1.可以使用增材制造根据数字模型来生产三维(3d)实体零件。增材制造可以用于快速原型设计、模具生成、模具母版生成和短期制造。增材制造涉及应用构建材料的连续层。这与通常通过移除材料来创建最终零件的一些加工过程不同。在一些增材制造技术中,可以固化或熔合构建材料。
附图说明
2.图1是图示了用于模型预测的方法的示例的流程图;
3.图2是图示了用于模型预测的方法的另一个示例的流程图;
4.图3是可以用于模型预测的装置的示例的框图;
5.图4是图示了用于模型预测的计算机可读介质的示例的框图;
6.图5是图示了机器学习模型架构的示例的框图;
7.图6a是图示了物体模型点云的示例的图;
8.图6b是图示了扫描物体点云的示例的图;
9.图7是图示了根据本文所描述的技术的一些示例的可以利用的部件的示例的框图;
10.图8a是图示了模型预测和比较的示例的图;以及
11.图8b是图示了模型预测和比较的示例的图。
具体实施方式
12.增材制造可以用于制造三维(3d)物体。3d打印是增材制造的示例。例如,可以将热能投影到构建区域中的材料上,其中,材料中的相变和固化可能在某些体素处发生。体素是3d空间中位置的表示(例如,3d空间的组件。例如,体素可以表示作为3d空间的子集的体积。在一些示例中,体素可以布置在3d网格上。例如,体素的形状可以是长方体或矩形棱柱。在一些示例中,3d空间中的体素可以是统一大小的或不统一大小的。体素大小尺寸的示例可以包括25.4毫米(mm)/150≈170微米(150个点每英寸(dpi))、490微米(50dpi)、2mm、4mm等。术语“体素水平”及其变型可以指与体素大小相对应的分辨率、尺度或密度。
13.在一些示例中,本文所描述的技术可以用于增材制造的各种示例。例如,一些示例可以用于塑料、聚合物、半结晶材料、金属等。一些增材制造技术可以是基于粉末的并且通过粉末熔合来驱动。本文所描述的方法的一些示例可以应用于基于面积的基于粉末床熔合的增材制造,如立体光固化(sla)、多射流熔合(mjf)、金属射流熔合、金属粘合打印、选择性激光熔化(slm)、选择性激光烧结(sls)、基于液体树脂的打印等。本文所描述的方法的一些示例可以应用于其中液滴携带的试剂被用于体素水平的热调制的增材制造。
14.在增材制造的一些示例中,可以利用热能来熔合材料(例如,颗粒、粉末等)以形成物体。例如,可以选择性地沉积试剂(例如,熔合剂、细化剂等)以控制体素水平的能量沉积,这可以触发针对选定体素的相变和/或固化。制造物体几何形状可以通过熔合过程驱动,这
使得能够预测或推断制造之后的几何形状。一些基于第一原理的制造模拟方法相对较慢、复杂,并且/或者可能无法提供目标分辨率(例如,亚毫米分辨率)。一些机器学习方法(例如,一些深度学习方法)可以提供改进的分辨率和/或速度。如本文所使用的,术语“预测”及其变型可以指确定和/或推断。例如,可以在事件或状态发生之前、期间和/或之后“预测”事件或状态。
15.机器学习模型是基于训练进行学习的结构。机器学习模型的示例可以包括人工神经网络(例如,深度神经网络、卷积神经网络(cnn)、动态图cnn(dgcnn)等)。训练机器学习模型可以包括调整机器学习模型的一个或多个权重。例如,神经网络可以包括一组节点、层和/或节点之间的连接。节点、层和/或连接可以具有相关联的权重。可以调整权重来训练神经网络执行功能,如预测制造之后的物体几何形状、物体变形或补偿。权重的示例可以在相对较大的数字范围中并且可以是负数或正数。
16.物体模型是表示物体的数据。例如,物体模型可以包括表示物体的几何形状(例如,点、顶点、线、多边形等)。
17.本文所描述的技术的一些示例可以利用机器学习模型(例如,深度神经网络)来预测或推断变形模型。变形模型是指示物体变形(例如,来自制造的变形)的物体模型。例如,机器学习模型可以提供用于直接预测物体变形的定量模型。物体变形是来自3d物体模型的物体几何形状的变化或差异。3d物体模型是物体的3d几何模型。3d物体模型的示例包括计算机辅助设计(cad)模型、网格模型、3d表面等。在一些示例中,3d物体模型可以用于制造(例如,打印)物体。在一些示例中,装置可以从另一个设备(例如,链接设备、联网设备、可移动存储装置等)接收3d物体模型或者可以生成3d物体模型。由于热扩散、热变化、重力、制造误差等原因,在制造期间可能发生物体变形。在一些示例中,变形模型可以表示为点云、网格模型、3d物体模型(例如,cad模型)等。在一些示例中,机器学习模型可以基于3d物体模型(例如,补偿模型)来预测变形模型。
18.本文所描述的技术的一些示例可以利用机器学习模型(例如,深度神经网络)来预测或推断补偿模型。补偿模型是对潜在或预期的变形(例如,来自制造的变形)进行补偿的物体模型。例如,机器学习模型可以提供用于直接预测物体补偿的定量模型(例如,补偿物体模型或物体模型点云)。补偿模型可以表示为点云、网格模型、3d物体模型(例如,计算机辅助设计(cad)模型)等。在一些示例中,机器学习模型可以预测或推断补偿模型。例如,机器学习模型可以基于目标几何形状来预测补偿模型(例如,3d物体模型)。在一些示例中,根据补偿模型制造(例如,打印)物体可以减少制造物体中的误差或几何不准确性,这可以有益地提供更准确的制造。
19.在本文所描述的技术的一些示例中,点云可以用于表示3d物体和/或3d物体几何形状。点云是3d空间中的一组点或位置。点云可以用于表示3d物体或3d物体模型。例如,可以用3d扫描仪(例如,一个或多个深度传感器、一个或多个相机、光探测与测距(lidar)传感器等)扫描3d物体以产生表示3d物体(例如,制造物体、3d打印物体等)的扫描物体点云。扫描物体点云可以包括表示3d空间中3d物体的表面上的位置的一组点。在一些示例中,可以从3d物体模型(例如,cad模型)生成物体模型点云。例如,可以执行从3d物体模型中随机选择点。例如,在一些方法中,可以通过对来自3d物体模型的表面的点均匀随机采样来生成物体模型点云。在一些示例中,可以通过将点均匀地投影到3d物体模型网格的表面上来生成
物体模型点云。例如,在一些方法中,可以生成整个表面上均匀密度的点或者网格中每个三角形的恒定数量的点。均匀投影可以指选择彼此相距阈值距离内的点(例如,点对)。点云可以是不规则的结构,其中,点不一定对应于均匀的网格。
20.点云可以提供灵活的几何表示。然而,将深度学习应用于点云数据可能并不简单。例如,一些深度神经网络模型可以利用具有规则结构的输入数据,而点云可能具有不规则结构。在一些方法中,可以将点云转换为3d体积表示以与神经网络模型一起使用。然而,将点云转换为3d体积表示可会产生量化伪像和高度稀疏的数据,这可能无法捕获细粒度的特征。因此,可以从非结构化点云中表示和学习局部几何结构的方法可以是有益的。
21.在本文所描述的技术的一些示例中,机器学习模型可以用于预测或推断补偿点云。补偿点云是对潜在或预期的变形(例如,来自制造的变形)进行补偿的点云。补偿点云可以是本文所描述的补偿模型的示例。例如,补偿点云可以表示对来自制造的变形进行补偿的3d物体模型。机器学习模型可以基于3d物体模型(例如,cad模型)的物体模型点云来预测或推断物体的补偿点云。在一些示例中,可以利用物体模型点云中的每个点并且/或者可以对物体模型点云中的所有点执行补偿预测。
22.在本文所描述的技术的一些示例中,机器学习模型可以用于预测表示制造物体的变形点云(例如,在物体被制造之前和/或独立于物体制造)。在一些示例中,机器学习模型可以基于物体模型点云和/或补偿点云来预测物体的变形点云(例如,物体变形)。在一些示例中,可以利用物体模型点云中的每个点并且/或者可以对物体模型点云中的所有点执行变形预测。
23.在一些示例中,可以使用一个或多个点云来训练一个或多个机器学习模型。例如,可以使用物体模型点云和扫描物体点云来训练机器学习模型。例如,一个或多个3d物体模型可以用于制造(例如,打印)一个或多个3d物体。可以从一个或多个3d物体模型确定一个或多个物体模型点云。可以通过扫描一个或多个制造的3d物体来获得一个或多个扫描物体点云。在一些示例中,用于训练机器学习模型的训练数据可以包括在与物体模型点云对齐之后的扫描点云。例如,可以利用扫描点云作为输入以及物体模型点云作为输出来训练补偿机器学习模型。补偿机器学习模型是用于预测或推断补偿模型或补偿点云的机器学习模型。在一些示例中,可以利用物体模型点云作为输入以及扫描点云作为输出来训练变形机器学习模型。变形机器学习模型是用于预测或推断变形模型或变形点云的机器学习模型。
24.在所有附图中,相同或相似的附图标记可以表示相似但不一定相同的元素。附图不一定是按比例绘制的,并且一些部分的尺寸可能被放大以更清楚地图示所示的示例。此外,附图提供了根据描述的示例和/或实施方式;然而,描述不限于附图中提供的示例和/或实施方式。
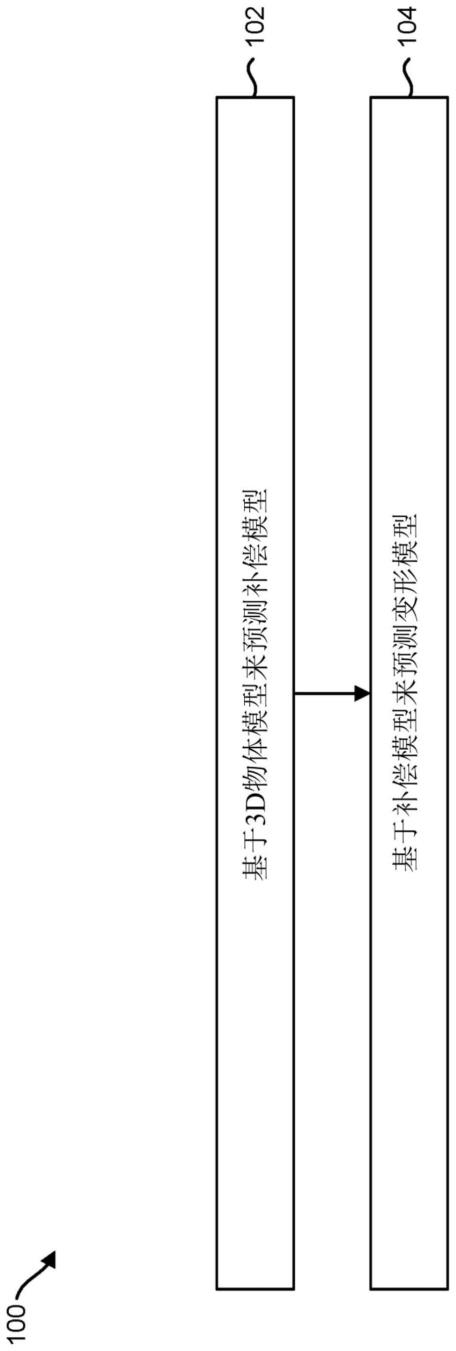
25.图1是图示了用于模型预测的方法100的示例的流程图。方法100和/或方法100的一个或多个元素可以由装置(例如,电子设备)来执行。例如,方法100可以由结合图3所描述的装置302来执行。
26.该装置可以基于3d物体模型来预测102补偿模型。例如,可以基于补偿机器学习模型来预测102补偿模型。例如,装置可以利用补偿机器学习模型来预测102补偿模型。在一些示例中,可以利用一个或多个训练扫描物体点云作为输入以及一个或多个训练物体模型点云作为输出(例如,真值)来训练补偿机器学习模型。训练扫描物体点云是用于训练的扫描
物体点云。例如,训练扫描物体点云可以用于在推断之前训练机器学习模型。训练物体模型点云是用于训练的物体模型点云。例如,训练物体模型点云可以用于在预测或推断之前训练机器学习模型。
27.在一些示例中,可以基于3d物体模型的物体模型点云来预测102补偿模型。例如,可以对3d物体模型进行采样以产生物体模型点云。可以将物体模型点云输入到补偿机器学习模型以预测或推断补偿模型(例如,补偿点云)。
28.该装置可以基于补偿模型来预测104变形模型。例如,可以基于变形机器学习模型来预测104变形模型。例如,该装置可以利用变形机器学习模型来预测104变形模型。在一些示例中,可以利用一个或多个训练物体模型点云作为输入以及一个或多个训练扫描物体点云作为输出(例如,真值)来训练变形机器学习模型。在一些示例中,训练扫描物体点云可以用于在推断之前训练变形机器学习模型。在一些示例中,训练物体模型点云可以用于在预测或推断之前训练变形机器学习模型。该一个或多个训练扫描物体点云和/或一个或多个训练物体模型点云可以与用于训练补偿机器学习模型的一个或多个训练扫描物体点云和/或一个或多个训练物体模型点云相同或不同。用于训练补偿机器学习模型的一个或多个输入和一个或多个输出可以与用于训练变形机器学习模型的一个或多个输入和一个或多个输出相反。
29.在一些示例中,该装置可以将从补偿模型预测的变形模型与3d物体模型进行比较。将变形模型与3d物体模型进行比较可以包括确定指示比较的一个或多个度量和/或可以包括确定指示比较的一个或多个图示(例如,一个或多个绘图、一个或多个图像等)。比较度量的一些示例可以包括变形模型与3d物体模型之间的一个或多个欧几里德距离、变形模型与3d物体模型之间的平均(例如,均值、中值和/或众数)距离、变形模型与3d物体模型之间的方差、变形模型与3d物体模型之间的标准偏差、变形模型与3d物体模型之间的一个或多个差、变形模型与3d物体模型之间的平均差、变形模型与3d物体模型之间的均方误差、图示了变形模型和3d物体模型的绘图、图示了3d物体模型(或变形模型)的表面上的误差或差异程度的绘图等。
30.在一些示例中,该装置可以提供变形模型(例如,变形模型点云)和/或比较。例如,该装置可以存储变形模型和/或比较、可以将变形模型和/或比较发送到另一个设备、和/或可以呈现变形模型和/或比较(例如,在显示器上和/或在用户界面中呈现)。
31.在一些示例中,变形模型和/或比较可以提供关于物体(例如,制造物体)可以如何变形的信息。在一些示例中,准确的变形机器学习模型在确定补偿机器学习模型方面可以是有益的。例如,补偿机器学习模型可以利用与变形机器学习模型类似的架构。在一些示例中,补偿机器学习模型可以用相对于变形机器学习模型相反的输入和输出进行训练。在一些示例中,补偿机器学习模型可以用于制造(例如,3d打印)物体。因此,具有改进的性能(例如,准确性)的补偿机器学习模型可以产生具有更准确几何形状的制造物体。
32.在一些示例中,该装置可以利用变形模型和/或比较对预测的变形进行补偿。例如,该装置可以调整3d物体模型(例如,cad模型)、补偿模型、补偿机器学习模型和/或打印变量(例如,试剂的量、热暴露时间等)以减少或避免制造物体中的误差或几何不准确性。在一些方法中,该装置可以执行迭代补偿。例如,该装置可以使用3d物体模型来预测物体变形(例如,一个或多个熔合体素的放置)物体,可以调整3d物体模型、补偿模型(例如,补偿几何
形状)、补偿机器学习模型(例如,一个或多个权重)和/或打印变量,并且可以使用一个或多个调整来重复预测物体变形。可以保留和/或放大减少预测的物体变形的调整。可以反转和/或减少增加预测的物体变形的调整。这个过程可以迭代直到预测的变形减少到目标量。在一些示例中,3d打印机可以打印经调整的(例如,变形减少和/或改进的)3d模型和/或补偿模型。
33.图2是图示了用于模型预测的另一个示例方法200的流程图。方法200和/或方法200的一个或多个元素可以由装置(例如,电子设备)执行。例如,方法200可以由结合图3所描述的装置302来执行。
34.该装置可以从3d物体模型来确定202物体物体模型点云。在一些示例中,可以如上所述来执行确定202物体模型点云。例如,在一些方法中,该装置可以对来自3d物体模型的表面点进行均匀随机采样。
35.该装置可以基于物体模型点云和补偿机器学习模型来预测204补偿模型。可以利用一个或多个训练扫描物体点云作为输入以及一个或多个训练物体模型点云作为输出(例如,真值)来训练补偿机器学习模型。在一些示例中,可以如关于图1所描述的来执行预测204补偿模型。在一些示例中,补偿模型可以是补偿点云。
36.该装置可以基于补偿模型(例如,补偿模型点云)和变形机器学习模型来预测206变形模型。可以利用一个或多个训练物体模型点云作为输入以及一个或多个训练扫描物体点云作为输出(例如,真值)来训练变形机器学习模型。在一些示例中,可以如关于图1所描述的来执行预测206变形模型。在一些示例中,变形模型可以是变形点云。
37.在一些示例中,在离线阶段执行预测206变形模型。离线阶段是独立于制造的程序、模式和/或周期。例如,可以独立于物体是否制造(例如,打印)物体来预测206变形模型。例如,可以与制造(例如,打印)物体分开来预测206变形模型。
38.该装置可以基于补偿模型来打印208 3d物体。例如,该装置可以指示和/或控制一个或多个打印设备(例如,一个或多个打印头、一个或多个热投影仪、一个或多个辊、一个或多个构建体积、一个或多个试剂分配器、一个或多个3d打印机等)打印208由补偿模型指示的3d物体。在一些示例中,该装置可以通过向打印机发送指令(例如,指示补偿模型的指令)来打印208 3d物体。
39.在一些示例中,在在线阶段执行打印208 3d物体。在线阶段是制造物体的程序、模式和/或周期。例如,可以在在线阶段制造(例如,打印)物体。在一些示例中,可以独立于预测206变形模型和/或与预测206变形模型分开来打印3d物体。
40.该装置可以将3d物体的扫描物体点云与物体模型点云和/或与变形模型的变形点云进行比较210。例如,该装置可以将扫描物体点云与物体模型点云进行比较、可以将扫描物体点云与变形点云进行比较、和/或可以将变形点云与物体模型点云进行比较。
41.在一些示例中,该装置可以扫描物体(例如,制造物体)以确定扫描物体点云和/或可以从另一个设备(例如,扫描仪)接收扫描图或扫描物体点云。例如,该装置可以包括和/或可以链接到扫描设备。在一些示例中,如上文所描述的,扫描设备可以用于扫描物体。在一些示例中,该装置可以基于扫描图来确定扫描物体点云。例如,该装置可以对来自扫描图的点执行随机选择。例如,在一些方法中,可以通过对来自扫描图表面的点均匀随机采样来生成扫描物体点云。在一些示例中,可以通过将点均匀地投影到扫描网格的表面上来生成
扫描物体点云。例如,在一些方法中,可以生成整个表面上均匀密度的点或者网格中每个三角形的恒定数量的点。
42.在一些示例中,该装置可以将一对或多对点云(例如,扫描物体点云、变形点云和物体模型点云)进行比较。例如,将点云进行比较可以包括确定指示比较的一个或多个度量和/或可以包括确定指示比较的一个或多个图示(例如,一个或多个绘图、一个或多个图像等)。比较度量的一些示例可以包括点云之间的一个或多个欧几里德距离、点云之间的平均(例如,均值、中值和/或众数)距离、点云之间的方差、点云之间的标准偏差、点云之间的一个或多个差、点云之间的平均差、点云之间的均方误差、图示了变形点云、扫描物体点云和/或物体模型点云的比较的绘图、图示了变形点云、扫描物体点云和/或物体模型点云的表面上的误差或差异程度的绘图。在一些示例中,该装置可以将补偿模型(例如,补偿点云)与变形点云、扫描物体点云和/或物体模型点云进行比较。
43.该装置可以提供212比较。例如,该装置可以存储比较、可以将比较发送到另一个设备、和/或可以呈现比较(例如,在显示器上和/或在用户界面中呈现)。在一些示例中,该装置可以提供物体模型点云、扫描物体点云、变形点云和/或补偿点云。例如,该装置可以物体呈现扫描物体点云与物体模型点云和/或与变形点云的图像。在一些示例中,方法200的一个或多个操作、一个或多个功能和/或一个或多个元素可以被省略和/或组合。
44.从物理领域的角度来看,一些增材制造技术(例如,mjf)是熔合过程,其中,热扩散可主导端部变形。使用边卷积,可以在点云上启用卷积。在一些示例中,机器学习模型(例如,dgcnn)可以包括边卷积块和/或层的堆叠。例如,机器学习模型可以包括边卷积层。机器学习模型可以提取几何变形特征和/或可以提供准确的物体几何形状预测。
45.图3是可以用于模型预测的装置302的示例的框图。装置302可以是计算设备,如个人计算机、服务器计算机、打印机、3d打印机、智能电话、平板计算机等。装置302可以包括和/或可以耦接到处理器304和/或耦接到存储器306。处理器304可以与存储器306电子通信。在一些示例中,装置302可以与增材制造设备(例如,3d打印设备)和/或扫描设备通信(例如,耦接到增材制造设备和/或扫描设备通信,具有与增材制造设备和/或扫描设备的通信链路)。在一些示例中,装置302可以是3d打印设备的示例。在不脱离本公开的范围的情况下,装置302可以包括附加部件(未示出),并且/或者本文所描述的部件中的一些部件可以被移除和/或修改。
46.处理器304可以是以下中的任一项:中央处理单元(cpu)、基于半导体的微处理器、图形处理单元(gpu)、现场可编程门阵列(fpga)、专用集成电路(asic)和/或适合于取得并执行存储在存储器306中的指令的其他硬件设备。处理器304可以获取、解码和/或执行存储在存储器306中的指令(例如,图生成指令310、边特征确定指令312、补偿预测指令313、变形预测指令314和/或操作指令318)。在一些示例中,处理器304可以包括一个或多个电子电路,该一个或多个电子电路包括用于执行指令(例如,图生成指令310、边特征确定指令312、补偿预测指令313、变形预测指令314和/或操作指令318)的一个或多个功能的电子部件。在一些示例中,处理器304可以执行结合图1至图8b中的一个、一些或全部图所描述的功能、操作、元件、方法等中的一个、一些或全部。
47.存储器306可以是包含或存储电子信息(例如,指令和/或数据)的任何电子、磁性、光学或其他物理存储设备。因此,存储器306例如可以是随机存取存储器(ram)、电可擦除可
编程只读存储器(eeprom)、存储设备、光盘等。在一些实施方式中,存储器306可以是非暂态有形机器可读存储介质,其中,术语“非暂态”并不涵盖暂态传播信号。
48.在一些示例中,装置302还可以包括处理器304可以在其上存储信息的数据存储装置(未示出)。数据存储装置可以是易失性和/或非易失性存储器,如动态随机存取存储器(dram)、eeprom、磁阻式随机存取存储器(mram)、相变ram(pcram)、忆阻器、闪速存储器等。在一些示例中,存储器306可以被包括在数据存储装置中。在一些示例中,存储器306可以与数据存储装置分开。在一些方法中,数据存储装置可以存储与存储器306所存储的指令和/或数据类似的指令和/或数据。例如,数据存储装置可以是非易失性存储器,并且存储器306可以是易失性存储器。
49.在一些示例中,装置302可以包括输入/输出接口(未示出),处理器304可以通过该输入/输出接口与一个或多个外部设备(未示出)通信,例如以接收和/或存储与可以针对其预测补偿和/或变形的一个或多个物体有关的信息。输入/输出接口可以包括使得处理器304能够与一个或多个外部设备通信的硬件和/或机器可读指令。输入/输出接口可以实现到一个或多个外部设备的有线或无线连接。在一些示例中,输入/输出接口可以进一步包括网络接口卡和/或还可以包括使得处理器304能够与各种输入和/或输出设备(如键盘、鼠标、显示器、另一个装置、电子设备、计算设备等)通信的硬件和/或机器可读指令,用户可以通过这些输入和/或输出设备将指令输入到装置302中。在一些示例中,装置302可以从一个或多个外部设备(例如,3d扫描仪、可移动存储装置、网络设备等)接收3d模型数据308和/或点云数据316。
50.在一些示例中,存储器306可以存储3d模型数据308。3d模型数据308可以由装置302生成和/或从另一个设备接收。3d模型数据308的一些示例包括一个或多个3d制造格式(3mf)文件、3d计算机辅助设计(cad)图像、物体形状数据、网格数据、几何形状数据等。3d模型数据308可以指示一个或多个物体的形状。
51.在一些示例中,存储器306可以存储点云数据316。点云数据316可以由装置302生成和/或从另一个设备接收。点云数据316的一些示例包括从3d模型数据308生成的一个或多个物体模型点云、来自一个或多个扫描物体的一个或多个扫描物体点云、一个或多个补偿点云、和/或一个或多个变形点云。例如,处理器304可以从由3d模型数据308指示的3d物体模型确定物体模型点云。物体模型点云可以与点云数据316一起存储。在一些示例中,该装置可以从另一个设备(例如,链接设备、联网设备、可移动存储装置等)接收一个或多个物体的一个或多个3d扫描图或者可以捕获可以指示扫描物体点云的3d扫描图。
52.存储器306可以存储补偿预测指令313。处理器304可以执行补偿预测指令313以基于物体模型点云来预测补偿点云。在一些示例中,补偿预测指令313可以包括补偿机器学习模型。例如,处理器304可以使用补偿机器学习模型以基于物体模型点云来预测补偿点云。
53.存储器306可以存储图生成指令310。处理器304可以执行图生成指令310来生成一个或多个图。例如,处理器304可以执行图生成指令310以通过针对物体模型点云中的每个点确定边来生成图。在一些示例中,处理器304可以从3d模型数据308确定物体模型点云。在一些示例中,图可以包括物体模型点云中的点作为顶点和确定的边。在一些示例中,装置302可以生成一个或多个物体模型点云、一个或多个补偿点云、一个或多个变形点云和/或一个或多个扫描点云的图。例如,可以针对一个或多个训练点云和/或针对用于预测或推断
的一个或多个点云执行生成图。
54.在一些示例中,装置302(例如,处理器304)可以从物体模型点云确定边。边是点之间的线或关联。在一些示例中,装置302可以通过确定物体模型点云中的每个点的近邻点来从物体模型点云确定边。近邻点是相对于另一个点满足标准的点。例如,离另一个点最近(例如,就欧几里德距离而言)的一个或多个点可以是相对于另一个点的一个或多个近邻点。在一些示例中,边可以被确定为点与对应的近邻点之间的线或关联。
55.在一些示例中,装置302(例如,处理器304)可以使用k最近邻(knn)方法来确定最近邻。例如,k可以是指示近邻点的阈值数量的值。例如,该装置可以确定离另一个点最近的k个点作为k个最近邻。
56.在一些示例中,装置302(例如,处理器304)可以生成点与对应的近邻点之间的边。例如,该装置可以存储点与对应的近邻点之间的每个边的记录。在一些方法中,点(例如,点云中的点)可以表示为xi=(xi,yi,zi),其中,xi是点在x维度或宽度维度上的位置,yi是点在y维度或深度维度上的位置,zi是点在z维度或高度维度上的位置,并且i是点云的索引。例如,对于每个点xi,装置302(例如,处理器304)可以找到近邻点(例如,knn)。装置302(例如,处理器304)可以生成每个点与对应的近邻点之间的边。在一些示例中,确定边可以生成图g=(v,e),其中,v是点(或顶点),并且e是图g的边。图是包括一个或多个顶点和/或一个或多个边的数据结构。边可以连接两个顶点。在一些示例中,图可以是或者可以不是数据的视觉显示或绘图。例如,图的绘图或可视化可以用于图示和/或呈现图。
57.在一些示例中,确定边可以基于距离度量。例如,装置302(例如,处理器304)可以确定某个点与候选点之间的距离度量。候选点是点云中可潜在地被选为近邻点的点。在一些示例中,可以根据如等式(1)中提供的欧几里德距离确定近邻点(例如,knn)。
[0058][0059]
在等式(1)中,j是点的索引,其中,j≠i。可以选择离该点最近的k个候选点作为近邻点并且/或者可以在该点与k个最近的候选点之间生成边。可以基于用户输入预先确定或确定k。
[0060]
在一些示例中,装置302(例如,处理器304)可以确定每个边的局部值。局部值是指示用于模拟热扩散效应的局部邻域信息的值(或值的向量)。在一些示例中,可以确定局部值为(x
j-xi)。例如,局部值可以是该点与近邻点之间的差。在一些示例中,可以用局部权重0m(例如,0m·
(x
j-xi))对局部值进行加权。在一些示例中,可以在用于学习局部特征和/或表示的机器学习模型训练期间估计局部权重。例如,θm·
(x
j-xi)可以捕获局部邻域信息,用物理见解来模拟更详细的热扩散效应。局部权重的示例可以在相对较大的数字范围中并且可以是负数或正数。
[0061]
在一些示例中,装置302(例如,处理器304)可以确定每个边的局部值和全局值的组合。全局值是指示用于模拟全局热质量效应的全局信息的值。例如,全局值可以是点xi。在一些示例中,可以用全局权重φm(例如,φm·
xi)对全局值进行加权。在一些示例中,可以在用于学习每个点上的全局变形效果的机器学习模型训练期间估计全局权重。例如,φm·
xi可以明确地采用全局形状结构,用物理见解来模拟整体热质量。在一些示例中,确定每个边的局部值和全局值的组合可以包括对每个边的局部值和全局值进行求和(具有或不具有
权重)。例如,装置302(例如,处理器304)可以计算θm·
(x
j-xi) φm·
xi。全局权重的示例可以在相对较大的数字范围中并且可以是负数或正数。
[0062]
在一些示例中,存储器306可以存储边特征确定指令312。在一些示例中,处理器304可以执行边特征确定指令312来确定图的每个边的边特征。例如,装置302(例如,处理器)可以确定从点云(例如,物体模型点云、补偿点云等)确定的每个边的边特征。边特征是指示点(例如,近邻点)之间的关系的值(或值的向量)。在一些示例中,边特征可以表示与连接两个点(例如,近邻点)的边相关联的几何结构。在一些示例中,处理器304可以确定每个边的局部值、可以确定每个边的局部值和全局值的组合、和/或可以将激活函数应用于每个组合以确定边特征。
[0063]
在一些示例中,装置302(例如,处理器304)可以基于每个边的组合来确定边特征。在一些示例中,装置302(例如,处理器304)可以通过将激活函数应用于每个边的组合来确定边特征。例如,装置302(例如,处理器304)可以根据等式(2)来确定边特征。
[0064]eijm
=relu(θm·
(x
j-xi) φm·
xi)
ꢀꢀꢀ
(2)
[0065]
在等式(2)中,e
ijm
是边特征,m是机器学习模型(例如,卷积神经网络、补偿机器学习模型和/或变形机器学习模型)的通道索引,并且relu是整流线性单元激活函数。例如,整流线性单元激活函数可以取0和输入值中的最大值。因此,整流线性单元激活函数可以为负输入值输出零并且可以输出等于正输入值的值。
[0066]
在一些示例中,装置302(例如,处理器304)可以对边特征进行卷积以预测点云。例如,装置302可以对边特征进行卷积以预测补偿点云或变形点云。在一些示例中,装置302(例如,处理器304)可以通过对边特征进行求和来对边特征进行卷积。例如,装置302(例如,处理器304)可以根据等式(3)对边特征进行卷积。
[0067]
x
′
im
=σ
j:(i,j∈e)eijm
ꢀꢀꢀ
(3)
[0068]
在等式(3)中,x
′
im
是预测点云中的点(例如,第i个顶点)。如等式(3)所示,图(例如,knn图)上的卷积被转换为规则卷积。因此,本文所描述的技术中的一些技术使得机器学习模型(例如,卷积神经网络)能够使用一个或多个点云(例如,物体模型点云、补偿点云)来预测物体补偿(例如,点云方式的物体补偿)和/或物体变形(例如,点云方式的物体变形)。
[0069]
在一些示例中,处理器304可以执行补偿预测指令313、图生成指令310、和/或边特征确定指令312来预测补偿点云。例如,装置302(例如,处理器304)可以利用补偿机器学习模型、图生成指令310、和/或边特征确定指令312来基于物体模型点云生成补偿点云。例如,装置302(例如,处理器304)可以从物体模型点云生成图、可以从图确定边特征、和/或可以对边特征进行卷积以预测补偿点云。
[0070]
存储器306可以存储变形预测指令314。在一些示例中,处理器304可以执行变形预测指令以预测变形点云。在一些示例中,变形预测指令314可以包括变形机器学习模型。例如,装置302(例如,处理器304)可以使用变形机器学习模型来基于补偿点云预测变形点云。在一些示例中,如上所述,装置302可以生成补偿点云的图和/或可以确定补偿点云的边特征。例如,处理器304可以执行图生成指令310和/或边特征确定指令312以用于获得补偿点云。在一些示例中,处理器304可以执行变形预测指令314以基于边特征(例如,来自补偿点云)来预测变形点云。在一些情况下,变形预测可以在物体的3d打印之前、期间或之后(例如,独立于物体的3d打印)执行。在一些示例中,处理器304可以使用包括用于对边特征进行
卷积的层的变形机器学习模型来预测物体变形。
[0071]
在一些示例中,处理器304可以执行操作指令318来执行操作。例如,装置302可以基于补偿点云和/或变形点云来执行操作。例如,处理器304可以在显示器上呈现补偿点云和/或变形点云、可以将补偿点云和/或变形点云存储在存储器306中、和/或可以将补偿点云和/或变形点云发送到另一个或多个设备。在一些示例中,装置302(例如,处理器304)可以对点云进行比较。例如,装置302可以将变形点云与物体模型点云进行比较。在一些示例中,装置302可以执行比较,如关于图1和/或图2所描述的。例如,装置302可以提供和/或呈现一个或多个比较,如关于图1和/或图2所描述的。
[0072]
在一些示例中,装置302(例如,处理器304)可以制造(例如,打印)物体。例如,装置302可以基于补偿点云来打印物体,如关于图1和/或图2所描述的。例如,处理器304可以基于变形补偿3d模型来驱动模型设置,该变形补偿3d模型基于补偿点云和/或变形点云。在一些示例中,可以扫描一个或多个物体以产生一个或多个扫描物体点云。
[0073]
在一些示例中,处理器304可以训练一个或多个机器学习模型。例如,处理器304可以使用点云数据316来训练补偿机器学习模型和/或变形机器学习模型。
[0074]
一些机器学习方法可以利用训练数据来预测或推断物体补偿和/或物体变形。训练数据可以指示在制造过程期间已经发生的变形。例如,可以基于3d物体模型(例如,计算机辅助绘图(cad)模型)和已经基于3d物体模型制造的物体的3d扫描图来评估物体变形。物体变形评估(例如,3d物体模型和3d扫描图)可以用作机器学习的真值。例如,物体变形评估可以实现变形预测和/或补偿预测。为了评估物体变形,可以对3d物体模型和3d扫描图进行配准。配准是用于对齐物体的过程。
[0075]
图4是图示了用于模型预测的计算机可读介质420的示例的框图。计算机可读介质420可以是非暂态有形计算机可读介质420。计算机可读介质420例如可以是ram、eeprom、存储设备、光盘等。在一些示例中,计算机可读介质420可以是易失性和/或非易失性存储器,如dram、eeprom、mram、pcram、忆阻器、闪速存储器等。在一些实施方式中,结合图3所描述的存储器306可以是结合图4所描述的计算机可读介质420的示例。
[0076]
计算机可读介质420可以包括代码(例如,数据和/或指令)。例如,计算机可读介质420可以包括点云数据421、转换指令422、补偿预测指令423、变形预测指令424、打印指令425和/或比较指令419。
[0077]
在一些示例中,计算机可读介质420可以存储点云数据421。点云数据421的一些示例包括3d物体模型(例如,3d cad文件)、一个或多个点云和/或扫描数据等的样本。点云数据421可以指示3d物体(例如,实际3d物体或3d物体模型)的形状。
[0078]
在一些示例中,转换指令422是用于使处理器基于针对物体模型点云中的每个点确定近邻点来将物体模型点云转换为图的代码。在一些示例中,这可以如关于图3所描述的那样完成。例如,可以执行转换指令422以针对物体模型点云中的每个点确定近邻点和边。确定近邻点可以包括确定相对于物体模型点云中的点的一组最近邻点。物体模型点云可以与用于3d打印的3d物体模型相对应。在一些示例中,可以使用knn方法来完成转换。
[0079]
在一些示例中,补偿预测指令423是用于使处理器基于物体模型点云来预测补偿点云的代码。在一些示例中,这可以如关于图1、图2和/或图3所描述的那样完成。例如,可以执行补偿预测指令423以确定图的每个边的边特征和/或通过补偿机器学习模型对边特征
进行卷积以预测物体补偿作为补偿点云。
[0080]
在一些示例中,打印指令425是使处理器指示3d打印机基于补偿点云来打印3d物体的指令。在一些示例中,这可以如关于图1、图2和/或图3所描述的那样完成。
[0081]
在一些示例中,变形预测指令424是用于使处理器基于补偿点云来预测变形点云的代码。在一些示例中,这可以如关于图1、图2和/或图3所描述的那样完成。例如,可以执行变形预测指令424以确定图的每个边的边特征和/或通过变形机器学习模型对边特征进行卷积以预测变形点云。
[0082]
在一些示例中,比较指令419是用于使处理器将来自3d物体的扫描物体点云与变形点云并且与物体模型点云进行比较的代码。在一些示例中,这可以如关于图1、图2和/或图3所描述的那样完成。
[0083]
图5是图示了机器学习模型架构的示例的框图。机器学习模型架构可以是本文所描述的机器学习模型的示例。例如,机器学习模型架构可以用于补偿机器学习模型和/或用于变形机器学习模型。机器学习模型架构包括节点和层。例如,机器学习模型架构包括输入层526、一个或多个边卷积层a 528a、一个或多个边卷积层b 528b、一个或多个边卷积层c 528c、一个或多个边卷积层d 528d和预测点云层530。在一些示例中,机器学习模型架构可以利用l2范数损失函数和/或自适应矩估计(adam)优化器。对于补偿机器学习模型的一些示例,输入层526可以采用物体模型点云,并且预测点云层530可以提供补偿点云。对于变形机器学习模型的一些示例,输入层526可以采用补偿点云,并且预测点云层530可以提供变形点云。
[0084]
在图5的示例中,机器学习模型架构堆叠了多个边卷积层528a至528d。虽然图5图示了可以根据本文所描述的技术中的一些技术利用的机器学习架构的一个示例,但是架构是灵活的并且/或者可以利用其他架构。输入层526可以具有n
×
3的维度,其中,n表示点云(例如,物体模型点云或补偿点云等)中的n个点并且3表示x、y和z坐标。在另一个示例中,机器学习模型架构可以具有更多特征作为输入(例如,x、y和z坐标的几何法线,其中,输入层将具有n
×
6的维度)。在图5的示例中,一个或多个边卷积层a 528a、一个或多个边卷积层b 528b和一个或多个边卷积层c 528c各自具有n
×
64的维度。一个或多个边卷积层d 528d具有n
×
3的维度。预测点云层530具有n
×
3的维度。在一些示例中,可以利用更多或更少的边卷积块,其可以在每个块中包括更多或更少的边卷积层。除了边卷积块之外,可以添加或可以不添加其他层(例如,池化层)。
[0085]
图6a是图示了物体模型点云的示例的图。例如,根据本文所描述的技术中的一些技术,3d物体模型的点云可以用作物体模型点云。在3d打印的一些示例中,3d物体模型(例如,cad设计)可以针对要打印的一个或多个物体提供数据和/或指令。在一些示例中,该装置可以从3d物体模型对层进行切割。层可以为实际打印提供数据和/或指令。为了能够以提高的准确性进行打印,可以控制3d物体模型。一个或多个物体模型点云可以提供3d物体模型的表示。为了测量和表示制造物体的形状(例如,几何形状),可以利用3d扫描仪测量实际打印物体的几何形状。测量的形状可以表示为点云。扫描点可以与对应于3d物体模型的点对齐,这可以使得能够计算变形。例如,在具有如下两个数据集的情况下:(1)扫描物体点云和(2)物体模型点云,可以开发一个或多个机器学习模型以提供准确的补偿预测(例如,补偿模型、补偿点云等)以用于打印。利用的点云的数量和/或密度可以是可调的(例如,通过
实验可调的)。
[0086]
图6b是图示了扫描物体点云的示例的图。例如,图6b的扫描物体点云可以是物体扫描图的表示。
[0087]
图7是图示了根据本文所描述的技术的一些示例的可以利用的部件的示例的框图。在一些示例中,关于图7所描述的一个或多个部件可以在关于图3所描述的装置302中实施。在一些示例中,关于图1至图6中任何一个图所描述的一个或多个功能可以在关于图7所描述的一个或多个部件中实施。关于图7所描述的一个或多个部件可以在一个或多个设备中、在硬件(例如,电路)中和/或在硬件和指令或代码的组合(例如,处理器和指令)中实施。关于图7所描述的部件包括补偿预测734部件、打印738部件、扫描740部件、变形预测742部件和比较752部件。
[0088]
补偿预测734部件可以包括和/或实施补偿机器学习模型。补偿机器学习模型可以被训练为学习从所得几何形状(例如,制造物体)到3d物体模型(例如,原始cad设计)的关系。在训练阶段,扫描点云可以用作输入以预测物体点云,其中,物体点云用作真值。一旦训练补偿模型,则在预测或推断阶段,具有目标几何形状的3d物体模型732(例如,物体模型点云)可以用作输入来预测补偿模型736(例如,补偿cad模型、补偿点云等)。例如,补偿预测734可以利用3d物体模型732来生成可以用于减少打印738之后的误差的补偿模型。
[0089]
例如,补偿模型736(例如,补偿点云)可以用于打印738。打印738可以产生可以用于扫描740的物体。扫描740可以产生物体的扫描模型748(例如,扫描物体点云)。在一些示例中,打印738和/或扫描740可以在在线阶段744执行。例如,在在线阶段744,补偿模型736可以用作到打印738的输入以打印物体。扫描740(例如,3d扫描仪)可以扫描打印物体的表面几何形状以产生扫描模型748(例如,扫描物体点云)。扫描模型748几何形状接近3d物体模型732几何形状可以是有益的。
[0090]
变形预测742可以利用补偿模型736来产生变形模型750。在一些示例中,变形预测742可以在离线阶段746执行。例如,在离线阶段,补偿模型736可以用作到变形预测742的输入以预测变形模型750。变形模型750几何形状接近3d物体模型732几何形状可以是有益的。
[0091]
在一些示例中,可以将3d物体模型732、补偿模型736、扫描模型748和/或变形模型750提供给比较752部件。比较752可以产生比较信息754,该比较信息可以指示3d物体模型732、补偿模型736、扫描模型748和/或变形模型750的一个或多个比较。例如,比较752部件可以展示补偿预测734和/或变形预测742的准确性和/或不准确性。例如,可以将来自在线阶段744的扫描模型748和变形模型750进行比较以指示补偿预测734和/或变形预测742的性能。比较信息754可以用于改进补偿预测734和/或变形预测742以提高打印准确性性能。
[0092]
图8a是图示了模型预测和比较的示例的图。例如,图8a将扫描物体模型图示为线条画,其中,将物体模型点云图示为点并且将预测补偿点云图示为十字。在该示例中,补偿机器学习模型用99个物体进行训练,其中,80个物体用于训练、10个物体用于验证并且9个物体用于测试。针对每个物体扫描10,000个样本点。在本文所描述的技术的一些示例中,样本点的数量可以是灵活的并且可以是通过实验可调的。在该示例中,扫描点与预测几何形状之间的均方误差(以毫米(mm)为单位)对于x维度为0.30、对于y维度为0.42并且对于z维度为0.35。
[0093]
图8b是图示了模型预测和比较的示例的图。例如,图8b将扫描物体模型图示为线
条画,其中,将物体模型点云图示为点并且将离线阶段的预测变形点云图示为星。在该示例中,3d物体模型(例如,物体模型点云)与预测几何形状之间的均方误差(以毫米(mm)为单位)对于x维度为0.55、对于y维度为0.68并且对于z维度为0.80。由于连接补偿机器学习物体模型和变形机器学习物体模型的累加误差,该值较大。
[0094]
本文所描述的技术的一些示例可以利用dgcnn和/或可以采用knn方法来完成边卷积。边卷积可以将非结构化点云中的特征提取转换为规则卷积,这可以实现局部特征学习(例如,用于模拟详细的热扩散效应)。在一些示例中,全局特征(例如,模拟整体热质量的全局特征)可以经由并入点云的全局坐标的整个列表来实施。通过提供针对几何形状补偿预测和/或变形预测的数据驱动的端到端方法,本文所描述的技术的一些示例可以是有益的。通过提供可以从非结构化点云学习局部几何结构并且可以根据物理见解(例如,热熔合驱动的变形)学习局部特征和全局特征两者的深度学习方法,本文所描述的技术的一些示例可以是有益的。本文所描述的技术中的一些技术可以为在线和离线形状变形控制提供框架。
[0095]
通过提供一个或多个定量模型来预测制造(例如,打印)物体的表面几何形状并且/或者以改进的速度和/或准确性普遍(例如,在整个3d物体模型上)进行补偿,本文所公开的技术的一些示例可以是有益的。通过提供可以从可以表示热熔合驱动的变形的点云学习局部特征和全局特征的深度学习端到端模型,一些示例可以是有益的。
[0096]
如本文所使用的,术语“和/或”可以指一个或多个项。例如,短语“a、b和/或c”可以指以下中的任一种:a(无b和c)、b(无a和c)、c(无a和b)、a和b(但没有c)、b和c(但没有a)、a和c(但没有b)、或者a、b和c中的所有。
[0097]
虽然本文描述了系统和方法的各种示例,但是该系统和方法不限于这些示例。可以在本公开的范围内实施本文所描述的示例的变型。例如,可以省略或组合本文所描述的示例的操作、功能、方面或元素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。