1.本发明涉及一种垃圾桶,尤其是涉及一种可移动智能杀菌驱虫垃圾桶。
背景技术:
2.随着智能家居概念的发展,智能化产品渐渐地进入我们的日常生活,如智能电视,智能音箱,智慧厨房,智能床等,据报道2017年全球智能家具市场规模达到147亿美元,随着大家对智能家居关注的不断加热和智能家居市场规模日益扩大,智能家居产品呈井喷式发展。而垃圾桶作为每个家庭必备的一种生活用品,为了顺应时代发展和应用的卫生便携,垃圾桶有必要设计的更加智能化。
技术实现要素:
3.针对上述问题,本发明旨在提供一种可移动智能杀菌驱虫垃圾桶,以适应时代的发展和便捷人们的生活。
4.本发明的技术方案是一种可移动智能杀菌驱虫垃圾桶,包括垃圾桶桶体和垃圾桶桶盖,所述垃圾桶桶体内置有电池和集成控制模块,所述集成控制模块内设置有臭氧杀菌模块和超声波驱动电路,所述臭氧杀菌模块对应设置有定时开关来控制臭氧发生器工作,所述超声波驱动电路通过超声波片产生频率高于20000赫兹的声波进行驱虫驱蟑螂。
5.优选的,所述垃圾桶桶盖顶面设置有触摸屏,所述触摸屏上设置有主机开关按键、臭氧杀菌开关按键和超声波开关按键,上述各个按键和集成控制模块通过按键电路连接。
6.优选的,所述集成控制模块内设置有语音识别模块,所述垃圾桶桶盖和垃圾桶桶体通过铰接轴铰接,铰接轴处设置有桶盖电机,所述语音识别模块与桶盖电机之间设置有喇叭驱动电路,语音识别模块接收到打开桶盖的语音信息时控制桶盖电机打开桶盖,所述喇叭驱动电路播放对应的桶盖打开的语音。
7.优选的,所述集成控制模块内设置有语音识别模块、红外感应电路和电机驱动模块,所述垃圾桶桶体底部设置有滚轮,滚轮由垃圾桶内置的电机驱动,所述电机与电机驱动模块通过电机驱动电路连接且设置有9轴传感器,语音识别模块接收移动垃圾桶的语音信息时控制垃圾桶朝声源处移动,移动过程中通过红外感应电路辨认并避开前方障碍物后快速精准移动到位。
8.优选的,所述垃圾桶桶盖上对应有红外对管,在前方检测到手势晃动时通过集成控制模块控制垃圾桶桶盖打开。
9.优选的,所述9轴传感器在垃圾桶受到拍打震动时将信号传递给集成控制模块,集成控制模块控制桶盖打开。
10.优选的,所述集成控制模块内有led指示电路,所述垃圾桶桶体外侧面设置有led指示灯。
11.优选的,所述电池与集成控制模块之间设置有稳压电路。
12.本发明能实现杀菌、驱蟑螂效果,能通过语音识别模块接受对应的打开桶盖、自动
行走操作,使得垃圾桶更加智能化。
附图说明
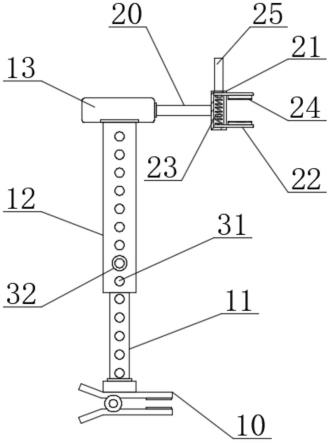
13.图1为本发明的一种结构示意图;
14.图2为图1另一视角的结构示意图;
15.图3为本发明的集成控制模块系统框图;
16.图4为9轴传感器的原理图;
17.图5为9轴传感器的12位adc模块模拟传感器;
18.图6为9轴传感器中的磁传感器原理图;
19.图7为图6的惠斯通电桥结构示意图。
20.其中:1—垃圾桶桶体;2—垃圾桶桶盖;3—触摸屏;4—红外对管。
具体实施方式
21.下面结合附图,对本发明作进一步详细说明。
22.如图1和图2所示,本发明提供了一种可移动智能杀菌驱虫垃圾桶,包括垃圾桶桶体1和垃圾桶桶盖2,所述垃圾桶桶体1内置有电池和集成控制模块,所述集成控制模块内设置有臭氧杀菌模块和超声波驱动电路,所述臭氧杀菌模块对应设置有定时开关来控制臭氧发生器工作,所述超声波驱动电路通过超声波片产生频率高于20000赫兹的声波进行驱虫驱蟑螂。
23.如图3所示,集成控制模块内集成有多个功能的模块,不同的模块对应处理不同的功能,具体的,其主要包括下列部分:
24.1、电池
25.充电采用5v适配器供电,电池容量2500mah;
26.2、稳压电路
27.稳压电路采用稳压芯片ams1117-3.3v设计;
28.3、led指示电路
29.led指示电路包含充电显示及工作状态指示,充电中led指示灯显示红色,充电完成led指示灯显示绿色,杀菌以及其他功能状态下显示不同的颜色。
30.4、按键电路
31.按键电路确保产品正常开关机以及开启和关闭产品功能;杀菌,超声波,语音等功能。
32.5、电机驱动电路
33.该电路采用步进电机驱动,确保智能垃圾桶可以移动和行走;
34.6、臭氧杀菌模块
35.臭氧杀菌模块,采用杀菌模块,当高电平开启时,臭氧发生器产生臭氧,为避免产品臭氧浓度过高影响个人健康,设备定时开关臭氧模块;
36.7、语音识别模块
37.语音识别采用科大讯飞的语音引擎做支持,当mic口识别到语音命令,设备进行相应的操作,比如:“小乐小乐,打开垃圾桶”则设备开启桶盖等功能。
38.8、喇叭驱动电路
39.喇叭驱动电路提示相应的语音交互功能,当语音识别到打开设备后,设备打开后,喇叭播放“设备已打开”等功能;
40.9、超声波驱动电路
41.超声波驱动电路采用超声波片进行设计,超声波是一种频率高于20000赫兹的声波,其频率下限大于人的听觉上限,蟑螂能够听见的声音频段比人类更广,且超声波具有方向性好,穿透能力强的特点,易于获得较集中的声能,因此可以达到驱虫驱蟑螂和除螨等功能。
42.10、红外感应电路
43.红外感应电路采用红外对管3进行设计,当检测到红外物体时,设备开启垃圾桶盖和杀菌装置。
44.11、9轴传感器
45.该电路采用gy-9255 mpu-9255 九轴姿态三轴电子指南针加速度陀螺仪模块,9轴传感器包括3轴加速度计、3轴陀螺仪、3轴磁力计,如图4所示,加速度传感器的输出包括xout表示x轴的传感数据分量,yout表示y轴的传感数据分量,zout表示z轴的传感数据分量,如果xout/yout/zout分别是加速度矢量v在x/y/z三轴的投影,则根据图示里面的三维空间的勾股定理,我们可以得出“v^2 = xout^2 yout^2 zout^2”(长方体:对角线^2 = 长^2 宽^2 高^2)
46.如果物体此时只受重力影响,我们就可以根据以上数据得出物体在x/y/z轴上面的倾斜角度了,假设三轴对应的倾斜角分别是ax/ay/az,则根据直角三角形的斜边公式“cos(a)=(∠a的)邻边/斜边”可以得出
47.cos(ax) = xout / v 对应的 ax = arcos(xout / v)
48.cos(ay) = yout / v 对应的 ay = arcos(yout / v)
49.cos(az) = zout / v 对应的 az = arcos(zout / v)
50.以上内容是基于数字传感器的数据处理,而有时候我们会选择模拟传感器,如图5所示,对于模拟传感器我们需要对adc数据进行前期处理才能得到对应的xout/yout/zout。图5中所示为12位adc模块,所以其输出值最大为2^12-1=4095,我们可以根据以下公式得出xout/yout/zout的值
51.xout = ((adcx/4095) * vref
ꢀ–ꢀ
v0g) / sens
52.yout = ((adcy/4095) * vref
ꢀ–ꢀ
v0g) / sens
53.zout = ((adcz/4095) * vref
ꢀ–ꢀ
v0g) / sens
54.其中等式中的adcx/adcy/adcz为adc输出值,vref为参考电压,v0g为零加速度电压值,sens为加速度计的灵敏度(即单位重力发生变化后引起的电压变化值)。如此,得到xout/yout/zout的值后即可参考前面内容计算物体倾斜角。
55.陀螺仪最终输出的是角度的变化率,也就是说,陀螺仪输出不是ax/ay/az的角度值,而是单位时间内角度的变化,假设物体t0秒测出的三轴的旋转弧度分别为ax0/ay0/az0,t1秒测出的三轴旋转弧度为ax1/ay1/az1,则三轴角速度ωx/ωy/ωz的值为
56.ωx = (ax1-ax0) / (t1
ꢀ–ꢀ
t0)
57.ωy = (ay1-ay0) / (t1
ꢀ–ꢀ
t0)
58.ωz = (az1-az0) / (t1
ꢀ–ꢀ
t0)
59.跟加速度计一样,陀螺仪的输出有通过i2c/spi等接口直接输出数字的,也有需要经过adc转换的模拟信号输出,类似的我们以12bit adc为例,其输出值最大为2^12-1=4095,我们定义acx/acy/acz为x/y/z三轴角速度的adc输入值,则可以用以下公式得出三轴角速度ωx/ωy/ωz的值
60.ωx = ((acx/4095) * vref
ꢀ–ꢀ
v0ω) / sens
61.ωy = ((acy/4095) * vref
ꢀ–ꢀ
v0ω) / sens
62.ωz = ((acz/4095) * vref
ꢀ–ꢀ
v0ω) / sens
63.等式中vref为参考电压,v0ω为零角速度电压值,也就是说物体在没有任何转动影响时候的输出电压(可以测量得到),sens为陀螺仪的灵敏度(即单位角速度变化引起的电压变化值)。
64.磁传感器就是感应环境磁场的变化,并把它转换为电信号,从而测量出对应物理量的器件,主要应用在电子罗盘、磁场感应器、位置感应器等方案中。见图6,磁传感器广泛采用amr材料(anisotropicmagneto-resistance),如铁、钴、镍及其合金等;amr特性是指当外部磁场与磁体内建磁场方向成零度角时, 电阻是不会随着外加磁场强度变化而发生改变的,但当外部磁场与磁体的内建磁场有一定角度的时候, 磁体内部磁化矢量会偏移,从而磁场方向和电流方向也会随之变化,导致电阻阻值也将发生变化;从图6中可以看到,当电流方向和磁体内磁化方向成45度角度时,外部磁场给磁阻所引起的电阻变化呈现出的是线性关系,所以磁传感器在没有外部磁力影响时候的初始角度设定为45度,利用这个线性关系再通过惠斯通电桥即可得到外界磁场值。
65.如图7所示即为惠斯通电桥,由四个磁阻组成磁传感器,其中r1和r4对应图6中的rb,r2和r3对应图6中的ra,一旦受到图6一样方向的外部磁场影响,则r1和r4的阻值会减少
∆
r,而r2和r3的阻值会增加
∆
r。
66.下面我们分别采用欧姆定律来计算b点和c点的电压vb和vc。
67.流过r1和r3的电流i1为
[0068][0069]
b点的电压为
[0070][0071]
同样的,c点电压为
[0072][0073]
这样我们就可以得出b点和c点的压差
∆v[0074][0075]
假设r1/r2/r3/r4的初始值为r,阻值变化为
∆
r,则r1和r4的值为r
‑∆
r,r2和r3的
值为r
∆
r,最终形成值为
[0076][0077]
从以上公式可以看出,在外部磁场的作用下电阻变化为
∆
r时,
∆
v的值和
∆
r现成正比关系,这就是磁力计的工作原理。
[0078]
本发明最终能实现臭氧杀菌、超声波驱蟑螂、语音开盖、语音移动垃圾桶、对着红外感应处手势移动开盖、拍打垃圾桶通过9轴传感器的3轴陀螺仪反馈信号给集成控制模块来开盖多个功能。
[0079]
以上所述,仅是本发明的较佳实施方式,并非对发明作任何形式上的限制,凡是依据本发明的技术原理对以上实施例所做的任何简单修改、等同变化或修饰,仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。