1.本实用新型货品运输设备技术领域,具体为一种搬运机构。
背景技术:
2.现有的货品运输大多是采用人工送料的方式将货品送至各道加工装置下方,需工人不断搬运,这样的送料方式费时费力,即使是自动搬运作业也需要多组气动组件或马达才能完成,且运输过程中没有限位组件,使得运输过程不稳定,造成货品从输送带掉落的情况,因此提出一种自动送料、适应不同宽度货品的搬运机构。
技术实现要素:
3.鉴于背景技术中存在的技术问题,本实用新型提供一种自动送料、适应不同宽度货品的搬运机构。为实现上述目的,本实用新型提供了如下的技术方案:
4.一种搬运机构,所述搬运机构包括导轨、传送带机构、u型架;所述导轨、传送带机构依次设置;所述导轨上设有可沿导轨长度方向水平移动的滑块;所述滑块两侧设有支座;所述转动轴分别与对应的支座转动连接,且伸出支座与u型架两侧固定相连;所述u型架开口向下,该u型架上设有用于夹持货品的夹具;所述导轨靠近传送带一端竖直设有支板,该支板远离传送带的侧面对应u型架位置设有限位螺栓。
5.所述搬运机构还包括驱动机构;所述驱动机构包括固定板、中间板、导向杆、连接轴、连接杆ⅰ、连接杆ⅱ、连接杆ⅲ;所述u型架两侧设有对应的通槽,两处通槽处水平设置底板;所述固定板、导向杆为两个;两个固定板分别设于所述底板位于u型架两端外侧位置处;所述中间板固定设于所述底板、两个固定板中间位置处;两个导向杆贯穿中间板,两端分别与对应的固定板固定相连;所述夹具采用l型限位块ⅰ、l型限位块ⅱ;所述l型限位块ⅰ、l型限位块ⅱ水平部分分别套设于两个导向杆上且可沿导向杆水平移动,且底面均与所述底板相抵触;所述l型限位块ⅰ、l型限位块ⅱ竖直部分分别设于u型架两端外侧位置处;所述连接轴与所述中间板上端面中间位置处转动连接;所述连接杆ⅱ套接于所述连接轴上;所述连接杆ⅰ一端与连接杆ⅱ一端铰接,另一端安装在l型限位块ⅰ水平部分上端面中间位置处;所述连接杆ⅲ一端与连接杆ⅱ另一端铰接,另一端安装在l型限位块ⅱ水平部分上端面中间位置处。
6.所述驱动机构还包括气缸;所述气缸固定端安装在所述中间板靠近l型限位块ⅰ端面上;所述气缸的活塞杆与所述l型限位块ⅰ固定相连。
7.所述滑块在无杆气缸的驱动下可沿导轨长度方向水平移动。
8.本实用新型的有益效果是:
9.1.本实用新型通过可转动的u型架在导轨末端接触到限位螺栓后自动翻转搬运物品,物品在重力作用下滑动到传送带上,完成需要多组气动组件或马达才能完成的搬运作业,提高送料效率,简化结构;
10.2.开启气缸,活塞杆带动l型限位块ⅰ沿导向杆方向做远离或靠近中间板的直线运
动,通过连接杆ⅰ、连接杆ⅱ、连接杆ⅲ带动l型限位块ⅱ以相同的速率与l型限位块ⅰ做相向或相背的直线运动,对货品两侧进行限位,防止在u型架翻转过程中掉落且可在一定范围内适应不同宽度的货品;
11.3.采用无杆气缸驱动滑块沿导轨移动,相比于传统的有杆气缸,节省了机构空间。
附图说明
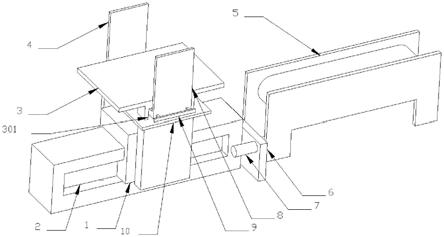
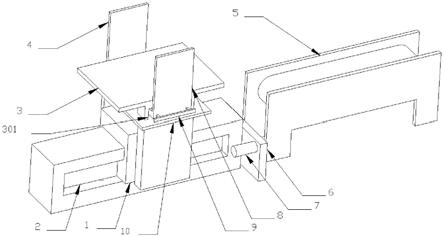
12.图1是本实用新型搬运机构的结构示意图;
13.图2是图1的正视图(翻转状态);
14.图3是图1的侧视图;
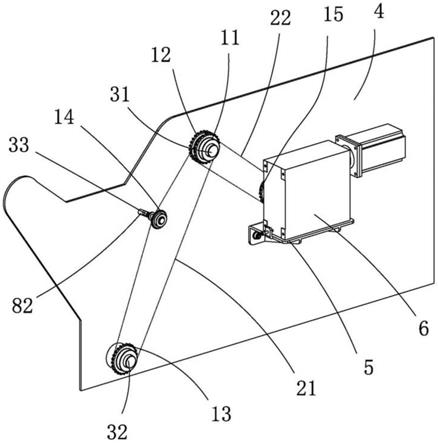
15.图4是本实用新型中驱动机构的位置结构示意图;
16.图中,1
‑
滑块,2
‑
导轨,3
‑
u型架,4
‑
l型限位块ⅰ,5
‑
传送带机构,6
‑
支板,7
‑
限位螺栓,8
‑
l型限位块ⅱ,9
‑
固定板,10
‑
底板,11
‑
转动轴,12
‑
支座,13
‑
驱动机构,14
‑
连接杆ⅲ,15
‑
连接杆ⅰ,16
‑
连接杆ⅱ,17
‑
中间板,18
‑
导向杆,19
‑
气缸,20
‑
活塞杆,21
‑
连接轴。
具体实施方式
17.结合图1至4所示,一种搬运机构,搬运机构包括导轨2、传送带机构5、u型架3;导轨2、传送带机构5依次设置;导轨2上设有可沿导轨2长度方向水平移动的滑块1;滑块1两侧设有支座12;转动轴11两端分别与对应的支座12转动连接,且伸出对应支座12与u型架3两端内侧固定相连,u型架3可随转动轴11转动;u型架3开口向下,该u型架3上设有用于夹持货品的夹具;导轨2靠近传送带一端竖直设有支板6,该支板6远离传送带的侧面对应u型架3位置设有限位螺栓7。
18.搬运机构还包括驱动机构13;驱动机构13包括固定板9、中间板17、导向杆18、连接轴21、连接杆ⅰ15、连接杆ⅱ16、连接杆ⅲ14;u型架3两侧设有对应的通槽301,两处通槽301处水平设置底板10;固定板9、导向杆18为两个;两个固定板9分别设于底板10位于u型架3两端外侧位置处;中间板17固定设于底板10、两个固定板9中间位置处;两个导向杆18贯穿中间板17,两端分别与对应的固定板9固定相连;夹具采用l型限位块ⅰ4、l型限位块ⅱ8;l型限位块ⅰ4、l型限位块ⅱ8水平部分分别套设于两个导向杆18上且可沿导向杆18水平移动,水平部分在通槽处水平移动,且底面均与底板10相抵触;l型限位块ⅰ4、l型限位块ⅱ8竖直部分分别设于u型架3两端外侧位置处,用于对货品限位;连接轴21与中间板17上端面中间位置处转动连接;连接杆ⅱ16套接于连接轴21上;连接杆ⅰ15一端与连接杆ⅱ16一端铰接,另一端安装在l型限位块ⅰ4水平部分上端面中间位置处;连接杆ⅲ14一端与连接杆ⅱ16另一端铰接,另一端安装在l型限位块ⅱ8水平部分上端面中间位置处。整个驱动机构13设于底板上,随着u型架的转动而转动。
19.驱动机构13还包括气缸19;气缸19固定端安装在中间板17靠近l型限位块ⅰ4端面上;气缸19的活塞杆20与l型限位块ⅰ4固定相连。
20.滑块1在无杆气缸的驱动下可沿导轨2长度方向水平移动,相比于传统的有杆气缸,节省了机构空间。
21.如图1
‑
4所示,本实用新型工作原理和流程如下:
22.在u型架3上方放置货品时,启动气缸19,如图4所示,活塞杆20带动l型限位块ⅰ4沿
导向杆18方向水平移动,当l型限位块ⅰ4远离中间板17时,连接杆ⅰ15通过连接杆ⅱ16带动连接杆ⅲ14相对于中间板17夹角(锐角)增大,即带动l型限位块ⅱ8以相同的速度远离中间板17;当l型限位块ⅰ4靠近中间板17时,连接杆ⅰ15通过连接杆ⅱ16带动连接杆ⅲ14相对于中间板17夹角(锐角)减小,即带动l型限位块ⅱ8以相同的速度靠近中间板17,调节l型限位块ⅰ4和l型限位块ⅱ8之间的距离,使得距离略大于货品宽度。
23.滑块1在无杆气缸19的驱动下沿导轨2向传送带机构5移动,当u型架3一侧与支板6上的限位螺栓7相抵触时,限位螺栓7推动u型架3随转动轴11顺时针转动,如图2所示,u型架3翻转,物品在重力作用下滑动到传送带上,实现自动送料,物品掉落后,u型架3重新复位,滑块1在无杆气缸的驱动下再重新移动至导轨2远离传送带机构5一端重新开始运送。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。