1.本发明涉及一种极片焊接装置,尤其涉及一种新能源电池串联极片焊接装置。
背景技术:
2.目前,人们一般是先将电池进行整齐排列,然后将极片放到电池的正极或负极之间,再通过焊接的方式将极片固定在电池之间。
3.专利申请cn212264871u,公开日为20210101,公开了一种电池电芯极片焊接装夹设备,其中,电池电芯极片焊接装夹设备包括底板和间隔位于所述底板上方的顶板,底板和顶板通过光轴连接,电池电芯极片焊接装夹设备包括至少1组装夹组件,所述装夹组件包括第一气缸、第二气缸和用于安置电芯的电芯定位筒,所述第一气缸的固定端连接所述底板的上方,所述第一气缸的活动端连接所述电芯定位筒,所述电芯定位筒连接有支撑板,所述第二气缸的固定端连接所述支撑板,所述第二气缸的活动端连接有压板,所述装夹组件还包括集流片定位盘。该电池电芯极片焊接装夹设备旨在解决现有技术中焊接圆柱锂电池电芯和极片时定位精度差、工作效率差的技术问题。上述专利虽然能够对极片进行定位放置,但是不能对电池进行翻转,需要人工操作,较为的麻烦。
4.因此,设计了一种能够自动对电池进行翻转的新能源电池串联极片焊接装置。
技术实现要素:
5.为了克服现有的焊接装夹设备一般不能对电池进行翻转,需要人工操作,较为麻烦的缺点,本发明的目的是提供一种能够自动对电池进行翻转的新能源电池串联极片焊接装置。
6.本发明通过以下技术途径实现:一种新能源电池串联极片焊接装置,包括有外壳、气缸、连接杆、焊接器、固定组件、锁定组件、进料组件和翻转组件,外壳内部的右上侧设有气缸,气缸的伸缩杆底部设有连接杆,连接杆底部间隔设有四个用于焊接极片的焊接器,外壳的内侧下部设有用于对电池进行夹紧并传输的固定组件,固定组件上设有用于限位的锁定组件,外壳内部的右上侧设有用于对极片进行上料的进料组件,固定组件上设有用于对电池进行翻转的翻转组件。
7.在其中一个实施例中,固定组件包括有第一支撑杆、转块、第二支撑杆、支撑板、固定块、第一弹簧和第一连杆,外壳内壁的左侧下部设有第一支撑杆,第一支撑杆的右部中间转动式设有转块,转块中部设有第二支撑杆,第二支撑杆左部转动式设有支撑板,支撑板与第一支撑杆滑动式连接,第二支撑杆的右部前后对称滑动式设有固定块,固定块左侧均开有方孔,固定块的内侧左部与第二支撑杆之间均设有第一弹簧,外壳的右侧下部前后对称设有第一连杆,固定块均与相邻的第一连杆接触。
8.在其中一个实施例中,锁定组件包括有卡杆、第二弹簧和第二连杆,第二支撑杆的右部前后对称滑动式设有卡杆,卡杆位于固定块左侧,卡杆往右运动能够卡住固定块,卡杆与第二支撑杆之间均设有第二弹簧,外壳内部的右下侧前后对称设有第二连杆,第二连杆
均与相邻的卡杆接触。
9.在其中一个实施例中,进料组件包括有第三连杆、储料框、第四连杆、第三弹簧、夹块和第四弹簧,左右两侧的焊接器前侧下部均设有第三连杆,外壳内侧上部的右前侧间隔设有四个储料框,储料框下部之间滑动式设有第四连杆,第三连杆均与第四连杆接触,第四连杆的前侧下部与四个储料框之间均设有第三弹簧,第四连杆的后侧下部间隔滑动式设有四组夹块,每组数量为二,每组夹块均位于相邻的储料框内部,夹块均与相邻的储料框接触,每组夹块的外侧前部与第四连杆之间均设有第四弹簧。
10.在其中一个实施例中,翻转组件包括有支撑块、第五连杆、第五弹簧、棘齿条、第六弹簧、第一楔形块、第七弹簧、第三支撑杆、第一卡块、第八弹簧、第二楔形块、第六连杆、第九弹簧、第一接触杆、第二接触杆和棘齿轮,第一支撑杆的右部前侧设有支撑块,支撑块的下部后侧滑动式设有第五连杆,第五连杆的右部后侧与支撑块之间设有第五弹簧,第五连杆的顶部右侧滑动式设有棘齿条,棘齿条与第五连杆之间前后对称设有第六弹簧,支撑板的底部中间滑动式设有第一楔形块,第一楔形块与第五连杆接触,第一楔形块顶部与支撑板之间设有第七弹簧,支撑块的上部左侧滑动式设有第三支撑杆,第三支撑杆底部设有第一卡块,第五连杆往前运动会与第一卡块接触,第三支撑杆下部绕有第八弹簧,第八弹簧的两端分别与支撑块和第一卡块连接,第三支撑杆上部滑动式设有第六连杆,第六连杆右侧设有第二楔形块,第六连杆右部绕有第九弹簧,第九弹簧的两端分别与第三支撑杆和第二楔形块连接,外壳内壁的前侧左上部设有第一接触杆,第六连杆往上运动会与第一接触杆接触,最左侧的焊接器左侧中部设有第二接触杆,第二接触杆往下运动会与第二楔形块接触,转块的左部设有棘齿轮,棘齿轮与棘齿条啮合。
11.在其中一个实施例中,还包括有用于自动将焊接好极片的电池推出的推出组件,推出组件包括有第十弹簧、第四支撑杆、第二卡块、第十一弹簧、第三接触杆和第十二弹簧,支撑板左侧与第一支撑杆之间前后对称设有第十弹簧,外壳内部的左上侧滑动式设有第四支撑杆,第四支撑杆底部设有第二卡块,支撑板往左运动会与第二卡块接触,第四支撑杆下部绕有第十一弹簧,第十一弹簧的两端分别与外壳和第二卡块连接,第四支撑杆上部滑动式设有第三接触杆,第三接触杆与第五连杆和第二接触杆接触,第三接触杆与第四支撑杆之间设有第十二弹簧。
12.在其中一个实施例中,还包括有用于对转块进行限位的限位组件,限位组件包括有导杆、限位块和第十三弹簧,第一支撑杆的上部右侧滑动式设有导杆,导杆底部设有限位块,限位块卡住转块,导杆上绕有第十三弹簧,第十三弹簧的两端分别与限位块和第一支撑杆连接。
13.在其中一个实施例中,转块的左部上下对称开有凹槽。
14.与现有技术相比,本发明其显著进步在于:1、本发明的固定块往左运动时,能够往内侧运动将电池夹紧,从而将电池往左传输至焊接器的正下方,当夹块往后运动时,能够往内侧运动将极片夹紧,从而将极片往后传输至电池的顶部之间,再通过气缸作为驱动力,能够带动焊接器往下运动完成焊接操作,省时省力。
15.2、本发明的焊接器往上运动复位时,能够使得棘齿轮转动180度,从而带动转块、第二支撑杆和固定块转动180度,进而能够带动电池转动180度,不需要人工操作,提高工作
效率。
16.3、本发明在第十弹簧的作用下,能够在极片焊接完成后,自动将固定块往右推出,从而带动焊接好极片的电池往右运动,方便人们的收集工作。
附图说明
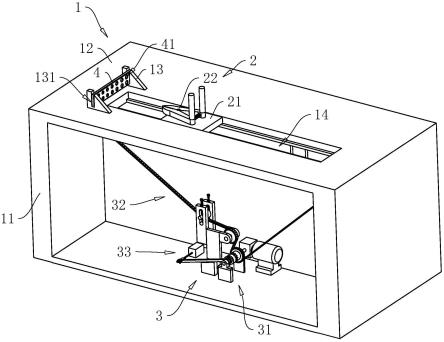
17.图1为本发明的立体结构示意图。
18.图2为本发明的局部剖视结构示意图。
19.图3为本发明固定组件的局部剖视示意图。
20.图4为本发明锁定组件的安装示意图。
21.图5为本发明的a处的放大结构示意图。
22.图6为本发明进料组件的第一种部分结构示意图。
23.图7为本发明进料组件的第二种部分结构示意图。
24.图8为本发明进料组件的第一种局部剖视结构示意图。
25.图9为本发明的b处的放大结构示意图。
26.图10为本发明进料组件的第二种局部剖视结构示意图。
27.图11为本发明翻转组件的安装示意图。
28.图12为本发明的c处的放大结构示意图。
29.图13为本发明的d处的放大结构示意图。
30.图14为本发明的e处的放大结构示意图。
31.图15为本发明推出组件的安装示意图。
32.图16为本发明的f处的放大结构示意图。
33.图17为本发明的g处的放大结构示意图。
34.图18为本发明限位组件的安装示意图。
35.附图标记中:1-外壳,2-气缸,3-连接杆,4-焊接器,5-固定组件,51-第一支撑杆,52-转块,53-第二支撑杆,54-支撑板,55-固定块,56-第一弹簧,57-第一连杆,6-锁定组件,61-卡杆,62-第二弹簧,63-第二连杆,7-进料组件,71-第三连杆,72-储料框,73-第四连杆,74-第三弹簧,75-夹块,76-第四弹簧,8-翻转组件,81-支撑块,82-第五连杆,83-第五弹簧,84-棘齿条,85-第六弹簧,86-第一楔形块,87-第七弹簧,88-第三支撑杆,89-第一卡块,810-第八弹簧,811-第二楔形块,812-第六连杆,813-第九弹簧,814-第一接触杆,815-第二接触杆,816-棘齿轮,9-推出组件,91-第十弹簧,92-第四支撑杆,93-第二卡块,94-第十一弹簧,95-第三接触杆,96-第十二弹簧,10-限位组件,101-导杆,102-限位块,103-第十三弹簧。
具体实施方式
36.以下结合说明书附图进一步阐述本发明、并结合说明书附图给出本发明的实施例。
37.实施例1一种新能源电池串联极片焊接装置,参照图1-图14,包括有外壳1、气缸2、连接杆3、焊接器4、固定组件5、锁定组件6、进料组件7和翻转组件8,外壳1内部的右上侧栓接有气
缸2,气缸2的伸缩杆底部焊接有连接杆3,连接杆3底部间隔设有四个焊接器4,启动气缸2,即可带动连接杆3和焊接器4往下运动,当焊接器4与极片接触时,即可完成极片的焊接工作,外壳1的内侧下部设有固定组件5,固定组件5上设有锁定组件6,外壳1内部的右上侧设有进料组件7,固定组件5上设有翻转组件8。
38.参照图1-图3,固定组件5包括有第一支撑杆51、转块52、第二支撑杆53、支撑板54、固定块55、第一弹簧56和第一连杆57,外壳1内壁的左侧下部焊接有第一支撑杆51,第一支撑杆51的右部中间转动式设有转块52,转块52的左部上下对称开有凹槽,转块52中部设有第二支撑杆53,第二支撑杆53左部转动式设有支撑板54,支撑板54与第一支撑杆51滑动式连接,第二支撑杆53的右部前后对称滑动式设有固定块55,固定块55左侧均开有方孔,固定块55往内侧运动时,能够对电池进行夹紧,固定块55的内侧左部与第二支撑杆53之间均设有第一弹簧56,外壳1的右侧下部前后对称设有第一连杆57,固定块55均与相邻的第一连杆57接触。
39.参照图2、图4和图5,锁定组件6包括有卡杆61、第二弹簧62和第二连杆63,第二支撑杆53的右部前后对称滑动式设有卡杆61,卡杆61位于固定块55左侧,卡杆61往右运动能够卡住固定块55,卡杆61与第二支撑杆53之间均设有第二弹簧62,外壳1内部的右下侧前后对称焊接有第二连杆63,第二连杆63均与相邻的卡杆61接触。
40.参照图1、图2、图6、图7、图8、图9和图10,进料组件7包括有第三连杆71、储料框72、第四连杆73、第三弹簧74、夹块75和第四弹簧76,左右两侧的焊接器4前侧下部均焊接有第三连杆71,外壳1内侧上部的右前侧间隔设有四个储料框72,储料框72下部之间滑动式设有第四连杆73,第三连杆71均与第四连杆73接触,第四连杆73的前侧下部与四个储料框72之间均设有第三弹簧74,第四连杆73的后侧下部间隔滑动式设有四组夹块75,每组数量为二,每组夹块75均位于相邻的储料框72内部,夹块75均与相邻的储料框72接触,人们可以将适量的极片放入储料框72内,当夹块75往内侧运动时,能够对极片进行夹紧,每组夹块75的外侧前部与第四连杆73之间均设有第四弹簧76。
41.参照图2、图11、图12、图13和图14,翻转组件8包括有支撑块81、第五连杆82、第五弹簧83、棘齿条84、第六弹簧85、第一楔形块86、第七弹簧87、第三支撑杆88、第一卡块89、第八弹簧810、第二楔形块811、第六连杆812、第九弹簧813、第一接触杆814、第二接触杆815和棘齿轮816,第一支撑杆51的右部前侧焊接有支撑块81,支撑块81的下部后侧滑动式设有第五连杆82,第五连杆82的右部后侧与支撑块81之间设有第五弹簧83,第五连杆82的顶部右侧滑动式设有棘齿条84,棘齿条84与第五连杆82之间前后对称设有第六弹簧85,支撑板54的底部中间滑动式设有第一楔形块86,第一楔形块86与第五连杆82接触,第一楔形块86顶部与支撑板54之间设有第七弹簧87,支撑块81的上部左侧滑动式设有第三支撑杆88,第三支撑杆88底部设有第一卡块89,第五连杆82往前运动会与第一卡块89接触,第三支撑杆88下部绕有第八弹簧810,第八弹簧810的两端分别与支撑块81和第一卡块89连接,第三支撑杆88上部滑动式设有第六连杆812,第六连杆812右侧焊接有第二楔形块811,第六连杆812右部绕有第九弹簧813,第九弹簧813的两端分别与第三支撑杆88和第二楔形块811连接,外壳1内壁的前侧左上部设有第一接触杆814,第六连杆812往上运动会与第一接触杆814接触,最左侧的焊接器4左侧中部设有第二接触杆815,第二接触杆815往下运动会与第二楔形块811接触,转块52的左部设有棘齿轮816,棘齿轮816与棘齿条84啮合,棘齿条84往后运动
时,能够带动棘齿轮816转动180度,从而带动电池转动180度,完成电池的翻转工作。
42.初始时,第二弹簧62处于拉伸状态,第四弹簧76处于压缩状态,当人们需要使用该新能源电池串联极片焊接装置时,首先将适量的极片分别放到四个储料框72中,然后将八节电池并排放置到外壳1的下部右侧,使得电池均位于固定块55内侧之间,且均正极朝上,此时第二支撑杆53和固定块55会对电池进行限位,然后将固定块55往左推动,带动第二支撑杆53、转块52、支撑板54和卡杆61往左运动,从而带动电池往左运动,支撑板54带动第一楔形块86往左运动,第一楔形块86挤压第五连杆82往前运动,第五弹簧83压缩,第五连杆82带动棘齿条84往前运动,棘齿轮816挤压棘齿条84往下运动,第六弹簧85压缩,此时,第一连杆57会挤压固定块55往内侧运动,第一弹簧56压缩,同时,卡杆61与第二连杆63分离,第二弹簧62恢复原状,带动卡杆61往右运动复位,当固定块55与卡杆61接触时,挤压卡杆61往左运动,第二弹簧62拉伸,当固定块55上的方孔与卡杆61对齐时,第二弹簧62恢复原状,带动卡杆61往右运动复位,使得卡杆61卡住固定块55,固定住固定块55的位置,此时固定块55能够将电池夹紧,并带动电池继续往左运动,当第五连杆82与第一卡块89接触时,挤压第一卡块89往上运动,第八弹簧810压缩,当第五连杆82越过第一卡块89时,第八弹簧810恢复原状,带动第一卡块89往下运动复位卡住第五连杆82,此时第一楔形块86与第五连杆82分离,第五连杆82和棘齿条84停止运动,第六弹簧85恢复原状,带动棘齿条84往上运动复位,使得棘齿条84重新与棘齿轮816啮合,当电池运动到焊接器4的正下方时,停止推动固定块55,再启动气缸2和焊接器4,控制气缸2的伸缩杆伸长,带动连接杆3和焊接器4往下运动,焊接器4带动第三连杆71和第二接触杆815往下运动,第三连杆71会挤压第四连杆73往后运动,第三弹簧74压缩,第四连杆73带动夹块75往后运动,使得夹块75与储料框72分离,第四弹簧76恢复原状,带动夹块75往内侧运动复位,使得夹块75能够夹住最下侧的极片,并带动最下侧的极片往后运动,此时第四连杆73会挡住其他的极片,当第二接触杆815与第二楔形块811接触时,挤压第二楔形块811往左运动,第九弹簧813压缩,当第二接触杆815越过第二楔形块811时,第九弹簧813恢复原状,带动第二楔形块811往右运动复位,当第四连杆73运动到最后侧时,最下侧的极片均与同侧的两节电池正极接触,同时,焊接器4与极片接触,从而能够对极片进行焊接,使得极片固定在同侧的两节电池正极之间,然后控制气缸2的伸缩杆缩短,带动连接杆3和焊接器4往上运动复位,使得焊接器4与极片分离,焊接器4带动第三连杆71和第二接触杆815往上运动复位,使得第三连杆71与第四连杆73分离,第三弹簧74恢复原状,带动第四连杆73和夹块75往前运动复位,此时夹块75会与焊接好的极片分离,当第二接触杆815与第二楔形块811接触时,挤压第二楔形块811往上运动,带动第六连杆812、第三支撑杆88和第一卡块89往上运动,第八弹簧810压缩,使得第一卡块89松开第五连杆82,第五弹簧83恢复原状,带动第五连杆82往后运动复位,第五连杆82带动棘齿条84往后运动复位,棘齿条84带动棘齿轮816转动180度,棘齿轮816带动转块52、第二支撑杆53和固定块55转动180度,从而带动电池转动180度,使得电池均负极朝上,当第六连杆812与第一接触杆814接触时,第一接触杆814挤压第六连杆812往左运动,第九弹簧813压缩,带动第二楔形块811往左运动,使得第二楔形块811与第二接触杆815分离,第八弹簧810恢复原状,带动第二楔形块811、第六连杆812、第三支撑杆88和第一卡块89往下运动复位,使得第六连杆812与第一接触杆814分离,第九弹簧813恢复原状,带动第二楔形块811和第六连杆812往右运动复位,当夹块75与储料框72接触时,储料框72挤压夹块75往外侧运动复位,第四弹簧76压缩,此时
第四连杆73完全复位,其他的极片会往下掉落,然后控制气缸2的伸缩杆伸长,即可将极片分别焊接在同侧的两节电池负极之间,在控制气缸2的伸缩杆缩短复位,然后关闭气缸2和焊接器4,将固定块55往右拉动复位,带动第二支撑杆53、转块52、支撑板54和卡杆61往右运动复位,从而带动电池往右运动,支撑板54带动第一楔形块86往右运动复位,当卡杆61与第二连杆63接触时,卡杆61停止运动,第二支撑杆53继续往右运动,第二弹簧62拉伸,使得卡杆61松开固定块55,当固定块55与第一连杆57分离时,第一弹簧56恢复原状,带动固定块55往外侧运动复位,使得固定块55将电池松开,同时,第一楔形块86与第五连杆82接触,第五连杆82挤压第一楔形块86往上运动,第七弹簧87压缩,当第一楔形块86越过第五连杆82时,第七弹簧87恢复原状,带动第一楔形块86往下运动复位,然后人工将焊接好极片的电池取走,重复上述操作,即可再次将极片焊接在电池上。
43.实施例2在实施例1的基础之上,参照图2、图15、图16和图17,还包括有推出组件9,推出组件9包括有第十弹簧91、第四支撑杆92、第二卡块93、第十一弹簧94、第三接触杆95和第十二弹簧96,支撑板54左侧与第一支撑杆51之间前后对称设有第十弹簧91,当极片焊接完成后,在第十弹簧91的弹力作用下,能够带动支撑板54往右运动,从而将焊接好极片的电池推出,外壳1内部的左上侧滑动式设有第四支撑杆92,第四支撑杆92底部焊接有第二卡块93,支撑板54往左运动会与第二卡块93接触,第四支撑杆92下部绕有第十一弹簧94,第十一弹簧94的两端分别与外壳1和第二卡块93连接,第四支撑杆92上部滑动式设有第三接触杆95,第三接触杆95与第五连杆82和第二接触杆815接触,第三接触杆95与第四支撑杆92之间设有第十二弹簧96。
44.初始时,第十二弹簧96处于拉伸状态,第十一弹簧94处于压缩状态,当人们往左推动固定块55时,带动第二支撑杆53、转块52和支撑板54往左运动,第十弹簧91拉伸,当第五连杆82往前运动时,第五连杆82松开第三接触杆95,第十二弹簧96恢复原状,带动第三接触杆95往前运动,使得第三接触杆95与第二接触杆815分离,第十一弹簧94恢复原状,带动第四支撑杆92、第二卡块93和第三接触杆95往下运动,当支撑板54与第二卡块93接触时,挤压第二卡块93往上运动,第十一弹簧94压缩,当支撑板54越过第二卡块93时,第十一弹簧94恢复原状,带动第二卡块93往下运动卡住支撑板54,此时焊接器4能够往下运动对极片进行焊接,从而将极片焊接在电池的正极之间,焊接器4带动第二接触杆815往下运动,焊接完成后,焊接器4会往上运动复位,带动第二接触杆815往上运动复位,此时第二接触杆815会挡住第三接触杆95的前侧,当第五连杆82往后运动复位时,会重新与第三接触杆95接触,此时第三接触杆95不发生移动,当焊接器4第二次往下运动时,焊接器4带动第二接触杆815往下运动,使得第二接触杆815与第三接触杆95分离,此时第五连杆82完全复位,挤压第三接触杆95往后运动,第十二弹簧96拉伸,此时电池的负极朝上,焊接器4能够将极片焊接在电池的负极之间,焊接完成后,焊接器4会往上运动复位,带动第二接触杆815往上运动复位,当第二接触杆815与第三接触杆95接触时,挤压第三接触杆95往上运动,带动第四支撑杆92和第二卡块93往上运动,第十一弹簧94压缩,使得第二卡块93松开支撑板54,第十弹簧91恢复原状,带动固定块55、第二支撑杆53、转块52和支撑板54往右运动复位,从而将焊接好极片的电池往右送出,由人工取走即可。
45.参照图2和图18,还包括有限位组件10,限位组件10包括有导杆101、限位块102和
第十三弹簧103,第一支撑杆51的上部右侧滑动式设有导杆101,导杆101底部焊接有限位块102,限位块102卡住转块52,导杆101上绕有第十三弹簧103,第十三弹簧103的两端分别与限位块102和第一支撑杆51连接。
46.当转块52转动时,会挤压限位块102往上运动,带动导杆101往上运动,第十三弹簧103压缩,使得限位块102远离上方的凹槽,当转块52转动180度后,转块52停止转动,此时限位块102与另一个凹槽对齐,第十三弹簧103恢复原状,带动导杆101和限位块102往下运动复位,使得限位块102卡住另一个凹槽,从而固定转块52的位置,避免转块52随意的发生转动。
47.最后,有必要说明的是:上述内容仅用于帮助理解本发明的技术方案,不能理解为对本发明保护范围的限制;本领域技术人员根据本发明的上述内容所做出的非本质改进和调整,均属本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。