1.本技术涉及柔性电子设备领域,尤其涉及具备温度自传感功能的形状记忆合金软体驱动器及具备温度自传感功能的形状记忆合金软体驱动器的制备方法。
背景技术:
2.软体机器人是当今机器人领域的一个新兴分支,这种机器人具有体积小、质量轻、柔软的特点,使其在某些场景下比传统刚性机器人更具优势。例如能够在狭小、非结构性化的环境中移动,具有在医疗、军事侦察、灾害救援等领域的应用前景。在以上应用场景中,软体驱动器为软体机器人的动力、运动输出的重要组件。
技术实现要素:
3.本技术提供了具备温度自传感功能的形状记忆合金软体驱动器及其制备方法。
4.该具备温度自传感功能的形状记忆合金软体驱动器,包括:
5.形状记忆合金丝,其能够被接入电路中,能够通过电流加热所述形状记忆合金丝;
6.柔性温度传感器,其抵触于所述形状记忆合金丝,用于检测所述形状记忆合金丝的温度;以及
7.预拉伸层柔性基底和封装层柔性基底,所述形状记忆合金丝和所述柔性温度传感器被封装于所述预拉伸层柔性基底和所述封装层柔性基底之间,
8.释放预拉伸后的所述预拉伸层柔性基底提供卷曲力,使得所述形状记忆合金丝未受到电流加热时,所述具备温度自传感功能的形状记忆合金软体驱动器呈现卷曲状态;所述形状记忆合金丝受到电流加热后,所述具备温度自传感功能的形状记忆合金软体驱动器能够展开;所述形状记忆合金丝冷却后,所述具备温度自传感功能的形状记忆合金软体驱动器能够恢复卷曲状态。
9.在至少一个实施方式中,所述形状记忆合金丝为u形、w形或蛇形。
10.在至少一个实施方式中,所述封装层柔性基底中设置有凹槽,在所述凹槽中容纳所述形状记忆合金丝和所述柔性温度传感器。
11.在至少一个实施方式中,所述凹槽包括容纳所述形状记忆合金丝的第一凹槽和容纳所述柔性温度传感器的第二凹槽,所述第二凹槽的深度大于所述柔性温度传感器的厚度,使得所述第二凹槽能够为所述柔性温度传感器的离面位移提供空间。
12.在至少一个实施方式中,所述预拉伸层柔性基底和所述封装层柔性基底的材料为掺杂有导热材料的硅胶,所述导热材料包括液态合金、金属粉末和石墨烯粉末中的至少一者。
13.在至少一个实施方式中,所述柔性温度传感器包括功能层和设置于所述功能层两侧的第一衬底层和第二衬底层,所述第一衬底层或所述第二衬底层避免所述功能层直接与所述形状记忆合金丝接触。
14.在至少一个实施方式中,所述功能层包括温度探测区和连接于所述温度探测区的
引线引出区,所述温度探测区呈蛇形。
15.在至少一个实施方式中,所述功能层和所述第一衬底层之间设置有过渡层,并且/或者
16.所述功能层和所述第二衬底层之间设置有过渡层,
17.所述过渡层的材料包括铬。
18.在至少一个实施方式中,所述形状记忆合金丝的两端伸出所述预拉伸层柔性基底和所述封装层柔性基底形成的基底,用于连接加热用的电路。
19.在至少一个实施方式中,所述预拉伸层柔性基底的预拉伸方向被设置成与所述形状记忆合金丝的部分结构的延伸方向平行。
20.该具备温度自传感功能的形状记忆合金软体驱动器的制备方法包括:
21.提供形状记忆合金丝;
22.提供柔性温度传感器,将所述柔性温度传感器抵触于所述形状记忆合金丝,所述柔性温度传感器用于测量所述形状记忆合金丝的温度;
23.提供预拉伸层柔性基底和封装层柔性基底,将所述形状记忆合金丝和所述柔性温度传感器封装于所述预拉伸层柔性基底和所述封装层柔性基底之间,
24.其中,在封装前,对所述预拉伸层柔性基底进行预拉伸,在将所述形状记忆合金丝和所述柔性温度传感器封装于预拉伸状态的所述预拉伸层柔性基底和所述封装层柔性基底之间之后,释放对所述预拉伸层柔性基底施加的预拉伸,使封装后的具备温度自传感功能的形状记忆合金软体驱动器呈现卷曲状态,
25.所述形状记忆合金丝受到电流加热后,所述具备温度自传感功能的形状记忆合金软体驱动器能够展开,所述形状记忆合金丝冷却后,所述具备温度自传感功能的形状记忆合金软体驱动器能够恢复卷曲状态。
26.在至少一个实施方式中,所述形状记忆合金丝为u形、w形或蛇形。
27.在至少一个实施方式中,所述封装层柔性基底中设置有凹槽,在所述凹槽中容纳所述形状记忆合金丝和所述柔性温度传感器。
28.在至少一个实施方式中,所述凹槽包括容纳所述形状记忆合金丝的第一凹槽和容纳所述柔性温度传感器的第二凹槽,所述第二凹槽的深度大于所述柔性温度传感器的厚度,使得所述第二凹槽能够为所述柔性温度传感器的离面位移提供空间。
29.在至少一个实施方式中,所述预拉伸层柔性基底和所述封装层柔性基底的材料为掺杂有导热材料的硅胶,所述导热材料包括液态合金、金属粉末和石墨烯粉末中的至少一者。
30.在至少一个实施方式中,所述柔性温度传感器包括功能层和设置于所述功能层两侧的第一衬底层和第二衬底层,所述第一衬底层或所述第二衬底层避免所述功能层直接与所述形状记忆合金丝接触。
31.在至少一个实施方式中,所述功能层包括温度探测区和连接于所述温度探测区的引线引出区,所述温度探测区呈蛇形。
32.在至少一个实施方式中,在所述功能层和所述第一衬底层之间设置过渡层,并且/或者
33.在所述功能层和所述第二衬底层之间设置过渡层,
34.所述过渡层的材料包括铬。
35.在至少一个实施方式中,所述形状记忆合金丝的两端伸出所述预拉伸层柔性基底和所述封装层柔性基底形成的基底,用于连接加热用的电路。
36.在至少一个实施方式中,所述预拉伸层柔性基底的预拉伸方向被设置成与所述形状记忆合金丝的部分结构的延伸方向平行。
37.本技术通过形状记忆合金丝为驱动器提供驱动力,通过将柔性温度传感器直接抵触设置于形状记忆合金丝,使驱动器具备了温度自传感功能,更利于驱动器的输出控制。
附图说明
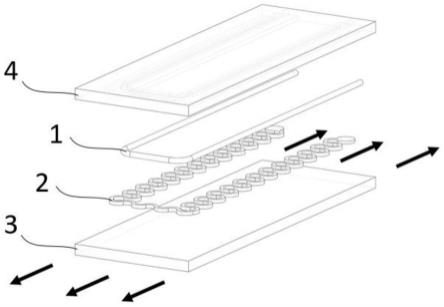
38.图1示出了根据本技术实施方式的具备温度自传感功能的形状记忆合金软体驱动器的结构示意图。
39.图2示出了根据本技术实施方式的具备温度自传感功能的形状记忆合金软体驱动器的去除封装层柔性基底后的俯视图。
40.图3示出了根据本技术实施方式的具备温度自传感功能的形状记忆合金软体驱动器的封装层柔性基底的结构示意图。
41.图4示出了根据本技术实施方式的具备温度自传感功能的形状记忆合金软体驱动器的形态变化示意图。
42.图5示出了根据本技术实施方式的具备温度自传感功能的形状记忆合金软体驱动器的柔性温度传感器的结构示意图。
43.图6示出了图5中的柔性温度传感器的功能层的俯视图。
44.图7示出了根据本技术实施方式的形状记忆合金丝热定型模具的结构示意图。
45.图8示出了根据本技术实施方式的柔性温度传感器的制备步骤示意图。
46.图9示出了根据本技术实施方式的预拉伸层柔性基底用模具的结构示意图。
47.图10示出了根据本技术实施方式的封装层柔性基底用模具的结构示意图。
48.图11示出了根据本技术实施方式的单轴拉伸装置的结构示意图。
49.附图标记说明
50.1形状记忆合金丝;
51.2柔性温度传感器;21第一衬底层;22功能层;221温度探测区;222引线引出区;23第二衬底层;
52.3预拉伸层柔性基底;
53.4封装层柔性基底;41凹槽;
54.5形状记忆合金丝热定型模具;51合金丝凹槽;
55.6预拉伸层柔性基底用模具;
56.7封装层柔性基底用模具;71第一凸起部;72第二凸起部
57.8单轴拉伸装置;81盖板;82基体
具体实施方式
58.下面参照附图描述本技术的示例性实施方式。应当理解,这些具体的说明仅用于示教本领域技术人员如何实施本技术,而不用于穷举本技术的所有可行的方式,也不用于
限制本技术的范围。
59.本技术的实施方式提供了具备温度自传感功能的形状记忆合金软体驱动器(后面,有时简称驱动器)及其制备方法。该驱动器可用于软体机器人等领域,具有高可靠性、轻质、柔软及驱动传感一体化等特点。
60.参见图1,驱动器可以包括形状记忆合金丝1、柔性温度传感器2、预拉伸层柔性基底3和封装层柔性基底4。
61.参见图2和图4,形状记忆合金丝1的大部分和柔性温度传感器2的全部可以被封装于预拉伸层柔性基底3和封装层柔性基底4之间。形状记忆合金丝1的两端部可以伸出柔性基底(预拉伸层柔性基底3和封装层柔性基底4),用于连接导线以施加加热电流。
62.原理上,形状记忆合金(shape memory alloys,sma)的内部晶格在不同温度下能够产生可逆的马氏体相变,形状记忆合金的弹性模量也随温度变化。形状记忆合金的弹性模量e(ξm)的函数表达式为:
63.e(ξm)=ea ξm(e
m-ea)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
64.式中,ξm是马氏体所占质量分数,与温度成负相关关系。ea、em分别为奥氏体和马氏体的弹性模量,且ea>em。根据式(1),当形状记忆合金温度低于相转变温度时,形状记忆合金主要成分为弹性模量较低的马氏体,整体形状可随意变形;当形状记忆合金的温度升高且高于相变温度时,形状记忆合金的主要成分转变为弹性模量较高的奥氏体,整体形状自发变为高温下的记忆形状;当温度重新下降到相变温度以下时,形状记忆合金的主要成分重新转变为马氏体,整体形状又可随意变形。
65.本技术即利用了形状记忆合金的形状记忆特性,作为驱动器的主体部分。示例性地,形状记忆合金丝1的材料可以为具有单程记忆效应的镍钛(niti)形状记忆合金。形状记忆合金丝1的形状可以为u形、w形或蛇形等,相比于单纯的一条线段的形态,u形、w形或蛇形的布置方式可以使驱动器中布置有更多的形状记忆合金,提高驱动器的驱动力。可以理解,本技术不限制形状记忆合金丝1的横截面的形状,其例如可以为圆形、矩形等。
66.柔性温度传感器2与形状记忆合金丝1直接接触,使得柔性温度传感器2可以测量形状记忆合金丝1的实时温度。进而,可以通过温度反推出柔性记忆合金丝1的弹性模量等信息,得到驱动器的形态。相比于传统的红外探测等非接触式温度检测方法,本技术能够测量出形状记忆合金丝1的更准确的实时温度,而非测量出包裹在形状记忆合金丝1外的柔性基底的温度。
67.预拉伸层柔性基底3在驱动器的各组件封装在一起之前可以进行预拉伸,利用结构的应变失配产生整体的卷曲,使驱动器整体呈现例如卷曲状态。此卷曲状态能够储存弹性势能,使之在形状记忆合金丝1驱动结束后能够利用弹性势能快速恢复为卷曲状态(后面介绍)。预拉伸的方向可以设置成与形状记忆合金丝1的部分结构平行,例如预拉伸的方向可以平行于u形的形状记忆合金丝1的一边,使得形状记忆合金丝1停止加热后,驱动器能够恢复为初始(卷曲)状态。
68.参见图3,封装层柔性基底4中可以设置凹槽41,凹槽41可以用于容纳形状记忆合金丝1和柔性温度传感器2。凹槽41的空间可以略大于形状记忆合金丝1和柔性温度传感器2的体积。凹槽41可以包括容纳形状记忆合金丝1用的第一凹槽和容纳柔性温度传感器2用的第二凹槽,第二凹槽的深度可以大于柔性温度传感器2的厚度。在驱动器卷曲及展平的过程
中,第二凹槽能够为柔性温度传感器2产生的离面位移提供空间,提高柔性温度传感器2的拉伸、压缩承载能力。
69.示例性地,预拉伸层柔性基底3和封装层柔性基底4的材料可以为掺杂有高导热材料的硅胶材料。其中,高导热材料可以为液态合金、金属粉末、石墨烯粉末等材料。掺杂高导热材料可以提高柔性基底的导热系数,提高散热能力,缩短驱动器的驱动后恢复初始状态的时间。掺杂材料的技术方案同时还能保持柔性基体的柔性特质。
70.参见图4,驱动器的驱动原理可以为:
71.(1)初始状态(未通电)下,形状记忆合金丝1的主要成分为弹性模量较低的马氏体,驱动器中起主导作用的是由预拉伸层柔性基底3带来的卷曲力,使得驱动器整体呈现为卷曲状态;
72.(2)接通电流,形状记忆合金丝1产生焦耳热,形状记忆合金丝1的温度升高,形状记忆合金丝1的弹性模量提高并向平面状态变形,使驱动器能够展开(驱动器的侧边曲率半径变大),驱动器即产生相应的驱动力及力矩;
73.(3)停止向形状记忆合金丝1通电,驱动器与周围环境进行热交换后自然冷却,形状记忆合金丝1的弹性模量降低,驱动器恢复至初始的卷曲状态。
74.形状记忆合金丝1的热响应速度很快,从而赋予了驱动器快速运动能力。由此,可以通过电流控制形状记忆合金丝1的温度,进而控制形状记忆合金丝1、驱动器的变化。例如,可以使形状记忆合金丝1按照某一规律升温、降温,从而使驱动器输出某一设定动作。实时的温度反馈,有利于及时调整各部件的状态,使上述过程更精确。
75.参见图5和图6,进一步地,本技术提供的柔性温度传感器2可以包括第一衬底层21、功能层22和第二衬底层23。功能层22的材料可以为金、铜、铂等金属,其厚度可以设置为150nm~250nm,其较薄的层厚使功能层22具备了优异的柔性。第一衬底层21和第二衬底层23可以设置在功能层22的两侧,使功能层22绝缘于形状记忆合金丝1,以防导通干扰。第一衬底层21和第二衬底层23的材料可以为聚酰亚胺等,其厚度可以设置为5μm~10μm。
76.由于功能层22大致位于柔性温度传感器2的力学角度的中性层上,其在柔性温度传感器2受弯曲载荷下的应力应变水平最低,因此不易损坏,可以提高耐用性。
77.为提高功能层22与衬底层(第一衬底层21和第二衬底层23)之间的粘附力,可以在功能层22与衬底层之间设置材料为金属的过渡层,例如可以使用铬等与衬底黏附力强的金属材料。
78.功能层22可以包括呈蛇形蜿蜒延伸的温度探测区221和用于连接引线的引线引出区222。温度传感器的基本原理是利用了金属材料的热电阻效应。在一定的温度范围内,金属导体的电阻随温度的升高而线性增大。其温度t满足
[0079][0080]
式中,r为金属导体在当前温度t时的电阻,r0为在基准温度t0时的基准电阻,α为电阻温度系数。在使用前,由温度标定试验确定t0、r0、α,从而根据式(2),可以由传感器的实时电阻确定金属导体的实时温度,从而得到其热量来源-形状记忆合金丝1的实时温度。
[0081]
温度探测区221的结构设置为蛇形蜿蜒形式可以提高柔性温度传感器2的拉伸和压缩能力和减少温度探测区221受拉伸、压缩变形而导致的电阻变化。例如温度探测区221
受到长度方向(例如图6中的左右方向)的拉伸或压缩时,蛇形蜿蜒结构会产生面内和离面位移,同时又能够减少由拉伸、压缩导致的电阻变化,使得柔性温度传感器2的电阻变化主要基于温度变化,使温度与电阻的对应更准确。即蛇形结构极大提高了柔性温度传感器的拉伸压缩承载能力,提高了传感器温度探测的准确性。
[0082]
引线引出区222可以为连接于温度探测区221末端的金属圆盘,引线引出区222用于引出导线(图中未示出),通过测量功能层22的电阻,能够得出柔性温度传感器2测出的形状记忆合金丝1的实时温度。
[0083]
参见图5,第一衬底层21的结构和尺寸可以与功能层22一致,第二衬底层23的结构和尺寸可以与温度探测区221一致,即第二衬底层23不具备引线引出区222的结构,可以从功能层22的第二衬底层23一侧连接导线。
[0084]
本技术设置的柔性温度传感器2可以在不对形状记忆合金丝1原本运动造成干扰的情况下,很好地实现驱动器的驱动传感一体化功能。可以通过温度反馈,更精确地控制驱动器的输出状态。
[0085]
本技术还提供了具备温度自传感功能的形状记忆合金软体驱动器的制备方法,其包括形状记忆合金丝1的制备、柔性温度传感器2的制备、预拉伸层柔性基底3和封装层柔性基底4的制备。
[0086]
参见图7,示例性地,形状记忆合金丝1的制备可以包括如下步骤。
[0087]
(1)利用机械加工方法制备形状记忆合金丝热定型模具5,模具的材料可选择耐高温塑料或金属。形状记忆合金丝热定型模具5中可以设置合金丝凹槽51。为方便取出形状记忆合金丝的同时固定住形状记忆合金丝,合金丝凹槽51的深度可以设置为形状记忆合金丝1的半径及直径之间。
[0088]
(2)将形状记忆合金丝1弯折嵌入合金丝凹槽51中,进行例如500摄氏度热定型工艺,半小时后自然冷却至室温并取出,得到记忆形状定型例如为平面u形的形状记忆合金丝。
[0089]
参见图8,示例性地,柔性温度传感器2的制备可以包括如下步骤。
[0090]
(s1)制备多层薄膜:例如,在硅片上旋涂牺牲层聚甲基丙烯酸甲酯(pmma),烘烤固化成膜;在pmma上旋涂柔性衬底聚酰亚胺(pi),阶梯加热固化成膜,作为第一衬底21;在pi上利用电子束蒸发的方式沉积功能层22的铜金属薄膜;再在铜表面以相同工艺旋涂柔性衬底pi,作为第二衬底23,再沉积金属掩膜层铝。
[0091]
(s2)第一次光刻:在上述多层薄膜材料表面旋涂正性光刻胶,烘烤固化;将第一掩膜版(图中未示出)覆盖在光刻胶层之上,掩膜版图案与柔性温度传感器2的功能层22图案一致(包含蛇形蜿蜒图案和焊接用圆盘图案),紫外曝光,烘烤固定;将样品置于显影液中显影光刻胶层,除去上一步中被曝光的光刻胶层部分,留下掩膜版图案的光刻胶层;用铝刻蚀液刻蚀没有光刻胶保护的铝层,得到具有第一掩膜版图案的铝层。
[0092]
(s3)图案化功能层22(铜层)和第一衬底层21(图8中的下层衬底):对上一步得到的样品进行反应离子刻蚀(rie),去除没有图案化铝掩膜保护的pi部分和顶层光刻胶;用铜刻蚀液刻蚀铜层,得到具有设计图案的功能层;对样品进行rie,得到具有设计图案的第一衬底21。
[0093]
(s4)第二次光刻:采用和第一次光刻相同的工艺,旋涂正性光刻胶,将第二掩膜版
(图中未示出)覆盖在光刻胶层之上,掩膜版图案与传感器的第二衬底层23图案一致(仅包含蛇形蜿蜒图案,无焊接用圆盘图案),紫外曝光,显影,用铝刻蚀液刻蚀没有光刻胶保护的铝层,得到第二掩膜版图案的铝层。
[0094]
(s5)图案化第二衬底层23(图8中的上层衬底):对上一步得到的样品进行rie,去除没有图案化铝掩膜保护的pi部分和顶层光刻胶,得到具有设计图案的第二衬底层23。可以理解,pi层(第二衬底层23)下的功能层铜(功能层22)会对之前制备好的第一衬底层21进行保护,不会被刻蚀。
[0095]
(s6)去除掩膜并焊接引线:将顶层铝掩膜用铝刻蚀液去除;将引线焊接在功能层22的引线引出区的焊接圆盘上,由此制备得到柔性温度传感器2。可以理解,此时pmma作为牺牲层将柔性温度传感器2固定于硬质基底硅片上,转印后pmma即留在硅片上,对柔性温度传感器2无影响。
[0096]
参见图9、图10,示例性地,预拉伸层柔性基底3和封装层柔性基底4的制备可以包括如下步骤。
[0097]
(1)利用3d打印或机械加工方法分别制备预拉伸层柔性基底用模具6及封装层柔性基底用模具7,模具的材料可以为树脂或金属等。预拉伸层柔性基底用模具6可以具有平板状凹陷。封装层柔性基底用模具7可以具有平板状凹陷,且该平板状凹陷中具有与封装层柔性基底4的凹陷41形状互补的凸起。示例性地,凸起包括第一凸起部71和设置在第一凸起部71上的第二凸起部72,第一凸起部71可以对应于封装层柔性基底4的第二凹槽,第二凸起部72可以对应于封装层柔性基底4的第一凹槽。
[0098]
(2)例如使用硅胶材料作为柔性基底材料,配置未固化硅胶材料,真空脱泡处理后分别倒入预拉伸层柔性基底用模具6及封装层柔性基底用模具7,用平板沿着模具上表面刮平,去除多余材料。
[0099]
(3)待硅胶材料完全固化后脱模,得到预拉伸层柔性基底3及封装层柔性基底4。
[0100]
在封装前,预拉伸层柔性基底3需要进行预拉伸。可以利用3d打印或机械加工方法制备单轴拉伸装置8,借助该单轴拉伸装置实现预拉伸层柔性基底3的预拉伸。其材料可选择树脂或金属。示例性地,单轴拉伸装置8可以包括两个盖板81及基体82。可以将预拉伸层柔性基底3放置于单轴拉伸装置8的基体82中,先将预拉伸层柔性基底3的一端用一个盖板81压住,并用夹子夹紧,拉长另一端,将预拉伸层柔性基底3的另一端用另一个盖板81压住并用夹子夹紧,得到施加预应变的预拉伸层柔性基底3。
[0101]
当然,可以使用各种现有的单轴或双轴拉伸装置来实现预拉伸层柔性基底3的预拉伸。
[0102]
驱动器整体的制备方法还可以包括:利用柔性印章将柔性温度传感器2从硬质硅片上转印至预拉伸层柔性基底3的设定位置;在封装层柔性基底4与预拉伸层柔性基底3接触部分涂抹硅胶粘接剂,并进行粘接;待硅胶粘接剂完全固化后剪裁出所需尺寸的驱动器。
[0103]
形状记忆合金丝1和柔性基底具有较好的疲劳特性,柔性温度传感器2具有高柔顺性和可延展性,故该驱动器具有高可靠性。同时,柔性基底的材料例如为硅胶,赋予了驱动器轻质柔软的特点。
[0104]
以上所述是本技术的优选实施方式,应当指出,对于本领域技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本技术的
保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。