技术特征:
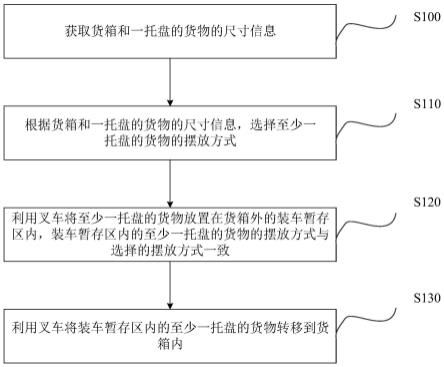
1.一种货物装车方法,其特征在于,所述方法包括:获取货箱和一托盘的货物的尺寸信息;根据所述货箱和一托盘的所述货物的尺寸信息,选择至少一托盘的所述货物的摆放方式;利用叉车将至少一托盘的所述货物放置在所述货箱外的装车暂存区内,所述装车暂存区内的至少一托盘的所述货物的摆放方式与选择的摆放方式一致;利用叉车将所述装车暂存区内的至少一托盘的所述货物转移到所述货箱内。2.根据权利要求1所述的方法,其特征在于,所述获取货箱和一托盘的货物的尺寸信息,包括:获取激光扫描仪在所述货箱的入口侧扫描得到的第一激光扫描数据;在所述第一激光扫描数据中搜索所述货箱的入口侧边缘的点云数据,得到所述货箱的入口侧相对的两组对边相对于所述激光扫描仪的方位和距离;基于所述货箱的入口侧较短的两对边相对于所述激光扫描仪的方位和距离,确定所述货箱的宽度;获取所述激光扫描仪在一托盘的货物的相邻两侧扫描得到的第二激光扫描数据;在所述第二激光扫描数据中搜索一托盘的所述货物的每一侧边缘的点云数据,得到一托盘的所述货物相邻两侧边相对于所述激光扫描仪的方位和距离;基于一托盘的所述货物的相邻两侧边相对于所述激光扫描仪的方位和距离,确定一托盘的所述货物的长度和宽度。3.根据权利要求2所述的方法,其特征在于,当所述货物的数量为偶数件时,所述根据所述货箱和一托盘的货物的尺寸信息,选择至少一托盘的所述货物的摆放方式,包括:若所述货箱的宽度与两倍的安全距离之差大于一托盘的所述货物的长度的两倍,则选择各托盘的所述货物的长度方向均与所述货箱的宽度方向平行的摆放方式;若所述货箱的宽度与两倍的安全距离之差小于等于一托盘的所述货物的长度的两倍,且大于一托盘的所述货物的长度和宽度之和,则选择同一行相邻的两托盘的所述货物的长度方向相互垂直,且同一列相邻的两托盘的所述货物的长度方向相互垂直的摆放方式;若所述货箱的宽度与两倍的安全距离之差小于等于一托盘的所述货物的长度和宽度之和,且大于一托盘的所述货物的宽度的两倍,则选择各托盘的所述货物的宽度方向均与所述货箱的宽度方向平行的摆放方式。4.根据权利要求1至3任一项所述的方法,其特征在于,所述利用叉车将至少一托盘的所述货物放置在所述货箱外的装车暂存区内,包括:获取所述激光扫描仪对一托盘的货物扫描得到的第三激光扫描数据;在所述第三激光扫描数据中搜索所述货物的相邻两侧边的点云数据,得到所述货物相邻两侧边相对于所述激光扫描仪的方位和距离;基于所述货物相邻两侧边相对于所述激光扫描仪的方位和距离,调整叉车的方向和位置,直到所述叉车在所述货物的长度方向或宽度方向延伸的中轴线上正对所述货物,且所述叉车的叉板位于所述货物的下方;控制所述叉车将所述货物叉起,按照选择的摆放方式放置在所述货箱外的装车暂存区内。
5.根据权利要求1至3任一项所述的方法,其特征在于,当所述货物的数量为偶数件时,所述利用叉车将所述装车暂存区内至少一托盘的所述货物转移到所述货箱内,包括:控制叉车将所述装车暂存区内同一行相邻的两托盘的所述货物一起叉起,按照预设路径转移到所述货箱的入口处;调整所述叉车的方向和位置,直到所述叉车背对所述货箱的入口,并且位于所述货箱沿长度方向延伸的中轴线上;基于所述货箱内货物的摆放位置,控制所述叉车将叉起的两托盘的所述货物放置在所述货箱内。6.根据权利要求5所述的方法,其特征在于,所述调整所述叉车的方向和位置,直到所述叉车背对所述货箱的入口,并且位于所述货箱沿长度方向延伸的中轴线上,包括:获取激光扫描仪在所述货箱的内部扫描得到的第四激光扫描数据;在所述第四激光扫描数据中搜索所述货箱的相对两侧边缘的点云数据,得到所述货箱的相对两侧边缘相对于所述激光扫描仪的方位和距离;基于所述货箱的相对两侧边缘相对于所述激光扫描仪的方位和距离,调整所述叉车的方向和位置,直到所述叉车背对所述货箱的入口,并且位于所述货箱沿长度方向延伸的中轴线上。7.根据权利要求6所述的方法,其特征在于,所述基于所述货箱内货物的摆放位置,控制所述叉车将叉起的两托盘的所述货物放置在所述货箱内,包括:在所述第四激光扫描数据中搜索所述货箱内货物的点云数据,得到所述货箱内货物相对于所述激光扫描仪的距离;控制所述叉车按照所述货箱内货物相对于所述激光扫描仪的距离移动,将叉起的两托盘的所述货物放置在所述货箱内货物正对所述货箱的入口一侧。8.一种货物装车装置,其特征在于,所述装置包括:尺寸获取模块,用于获取货箱和一托盘的货物的尺寸信息;方案确定模块,用于根据所述货箱和一托盘的所述货物的尺寸信息,选择至少一托盘的所述货物的摆放方式;货物摆放模块,用于利用叉车将至少一托盘的所述货物放置在所述货箱外的装车暂存区内,所述装车暂存区内的至少一托盘的所述货物的摆放方式与选择的摆放方式一致;货物装车模块,用于利用叉车将所述装车暂存区内的至少一托盘的所述货物转移到所述货箱内。9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种货物装车方法及装置。方法包括:获取货箱和一托盘的货物的尺寸信息;根据货箱和一托盘的货物的尺寸信息,选择至少一托盘的货物的摆放方式;利用叉车将至少一托盘的货物放置在货箱外的装车暂存区内,装车暂存区内的至少一托盘的货物的摆放方式与选择的摆放方式一致;利用叉车将装车暂存区内的至少一托盘的货物转移到货箱内。该方法能够实现货物自动化装车,根据货箱尺寸和货物尺寸调整货物的摆放方式,提高了货箱的空间利用率。提高了货箱的空间利用率。提高了货箱的空间利用率。
技术研发人员:杨秉川 李陆洋 方牧 鲁豫杰
受保护的技术使用者:未来机器人(深圳)有限公司
技术研发日:2022.06.02
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。