1.本发明涉及物品搬运系统技术领域,特别涉及一种搬运系统。
背景技术:
2.现有的搬运作业系统包括第一搬运机器人、第二搬运机器人、搬运车、货物存放台和货架,第一搬运机器人靠近货物存放台设置,第二搬运机器人靠近货架设置,搬运车用于在货物存放台与货架之间往复移动。当搬运作业系统需要转移货物时,搬运车首先移动至货物存放台附近,此时第一搬运机器人将货物存放台上的货物转移至搬运车上,之后负载的搬运车将货物运输至货架附近,最后第二搬运机器人将搬运车上的货物转移至货架上。
3.现有的搬运作业系统在转移货物的过程中,需要至少一个搬运机器人与搬运车联动配合才能实现货物的转移工作,搬运车不能自主完成货物转移至货架的工作,使得系统整体结构复杂,工作效率低。而且搬运机器人的布置占据了仓储空间,增加了成本。
技术实现要素:
4.有鉴于此,本发明提供一种搬运系统,搬运车与置物架能够结构耦合,作业过程灵活快捷,效率高。
5.一种搬运系统,包括搬运车和置物架,搬运车包括行走底盘、升降机构和载物架,升降机构连接在行走底盘上,载物架与升降机构连接,载物架包括承载面和贯穿承载面的避让空间;置物架包括支撑架和至少一个置物臂,置物臂的端部固定于支撑架,置物臂沿水平方向设置;当承载面放置有物品时,升降机构驱使载物架抬升至设定高度,行走底盘可移动至置物臂的下方,并使置物臂穿设在避让空间中,升降机构驱使载物架下降回位可使物品留在置物臂上。
6.在本发明的实施例中,上述载物架包括第一承载台和第二承载台,所述第一承载台与所述第二承载台相对设置,所述第一承载台和所述第二承载台的上表面为所述承载面,所述避让空间位于所述第一承载台与所述第二承载台之间。
7.在本发明的实施例中,上述第一承载台的上表面固定有第一导向板,所述第二承载台的上表面固定有第二导向板,所述第一导向板与所述第二导向板相对设置;当所述承载面放置有物品时,所述物品位于所述第一导向板与所述第二导向板之间。
8.在本发明的实施例中,上述载物架还包括第三承载台,所述第三承载台位于所述第一承载台与所述第二承载台之间,所述第三承载台的上表面为所述承载面,所述第一承载台与所述第三承载台之间以及所述第二承载台与所述第三承载台之间均具有所述避让空间。
9.在本发明的实施例中,上述第三承载台的上表面固定有第一限位板和第二限位板,所述第一限位板与所述第二限位板相对地设置于所述第三承载台的两端,所述第一导向板、所述第二导向板、所述第一限位板和所述第二限位板围合成放置所述物品的区间。
10.在本发明的实施例中,上述载物架还包括托板,所述第一承载台、所述第二承载
台、所述第三承载台均固定于所述托板的上表面,所述托板的下表面与所述升降机构连接。
11.在本发明的实施例中,上述支撑架包括纵梁,所述纵梁沿水平方向设置;所述置物臂包括相互间隔设置的第一置物梁和第二置物梁,所述第一置物梁、所述第二置物梁与所述纵梁固定连接,所述第一置物梁和所述第二置物梁横跨所述纵梁设置,所述第一置物梁和所述第二置物梁在所述纵梁的一侧形成第一置物部,所述第一置物梁和所述第二置物梁在所述纵梁的另一侧形成第二置物部。
12.在本发明的实施例中,上述搬运系统还包括传送机构,所述传送机构包括驱动组件、第一传送带和第二传送带,所述驱动组件连接于所述纵梁或所述置物臂,所述第一传送带连接于所述第一置物梁,所述第二传送带连接于所述第二置物梁,所述驱动组件用于驱动所述第一传送带和所述第二传送带传送所述物品。
13.在本发明的实施例中,上述第一置物梁的相对两端均设有第一从动轮,所述第一传送带套设于两个所述第一从动轮;所述第二置物梁的相对两端均设有第二从动轮,所述第二传送带套设于两个所述第二从动轮;所述驱动组件包括电机、齿轮组、联动轴、第一主动轮和第二主动轮,所述电机与所述齿轮组连接,所述联动轴与所述齿轮组连接,所述第一主动轮、所述第二主动轮与所述联动轴连接,所述第一主动轮与所述第一传送带联动连接,所述第二主动轮与所述第二传送带联动连接。
14.在本发明的实施例中,上述传送机构还包括编码器和传感器,所述编码器分别与所述电机、所述传感器电性连接,所述编码器用于记录所述第一传送带和所述第二传送带上的所述物品位置,所述传感器用于获取所述物品的信息。
15.本发明的搬运系统的搬运车与置物架能够结构耦合,搬运车能通过升降机构将物品转移至置物架的置物臂上,或者将置物臂上的物品转移至其他工位,整个作业过程灵活快捷,效率高。而且无需设置其他具有多轴机械臂的机器人转移物品,整个搬运系统结构简单,成本低。
附图说明
16.图1是本发明的搬运系统的控制示意图。
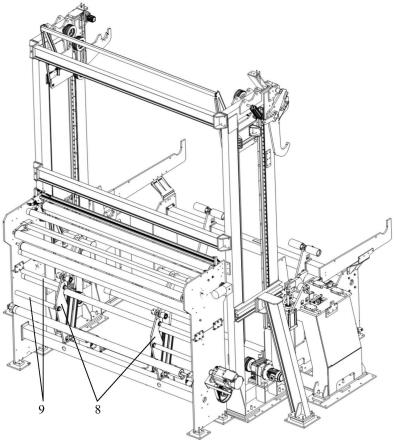
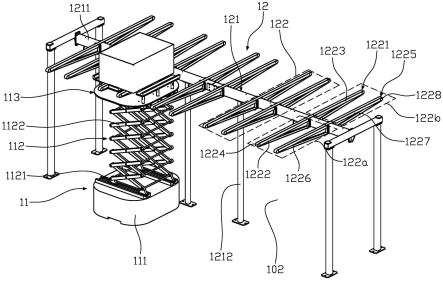
17.图2和图3是本发明的搬运车将物品搬运至置物架上的结构示意图。
18.图4是本发明的载物架的结构示意图。
19.图5是本发明的传送机构与置物架的结构示意图。
具体实施方式
20.本发明提供了一种搬运系统。
21.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
22.为了便于本领域技术人员的理解,本发明通过以下实施例对本发明提供的技术方案的具体实现过程进行说明。
23.图1是本发明的搬运系统的控制示意图,图2和图3是本发明的搬运车将物品搬运至置物架上的结构示意图,如图1、图2和图3所示,搬运系统包括搬运车11和置物架12,搬运车11包括行走底盘111、升降机构112和载物架113,升降机构112连接在行走底盘111上,载物架113与升降机构112连接,载物架113包括承载承载面1131和贯穿承载面1131的避让空间101;
24.置物架12包括支撑架121和至少一个置物臂122,置物臂122的端部固定于支撑架121,置物臂122沿水平方向设置;
25.当承载面1131放置有物品时,升降机构112驱使载物架113抬升至设定高度,行走底盘111可移动至置物臂122的下方,并使置物臂122穿设在避让空间101中,升降机构112驱使载物架113下降回位可使物品留在置物臂122上。
26.本发明的搬运系统的作业过程包括:
27.首先,将物品放置在搬运车11的载物架113上,搬运车11按照规划的路线移动至置物架12附近。
28.然后,升降机构112驱使载物架113抬升至设定高度(沿竖直方向抬升),保证置物臂122能够水平插入载物架113的避让空间101为准。
29.接着,搬运车11向着靠近置物臂122的方向移动,直至置物臂122逐渐插入载物架113的避让空间101中,此时置物臂122与载物架113耦合。
30.之后,升降机构112驱使载物架113下降回位使物品留在置物臂122上,完成物品的存放作业。
31.本发明的搬运系统的搬运车11与置物架12能够结构耦合,搬运车11能通过升降机构112将物品转移至置物架12的置物臂122上,或者将置物臂122上的物品转移至其他工位,整个作业过程灵活快捷,效率高。而且无需设置其他具有多轴机械臂的机器人转移物品,整个搬运系统结构简单,成本低。
32.可选地,图4是本发明的载物架的结构示意图,如图2、图3和图4所示,载物架113包括第一承载台1132和第二承载台1134,第一承载台1132与第二承载台1134相对设置,第一承载台1132和第二承载台1134的上表面为承载面1131,避让空间101位于第一承载台1132与第二承载台1134之间。当载物架113上放置有物品时,物品的底部压在第一承载台1132和第二承载台1134上。
33.可选地,搬运车11为agv小车,能够自主导航移动,其结构和功能请参照现有技术,此处不再赘述。
34.可选地,升降机构112包括滑动座1121、之字形支架1122和驱动器(图未示),滑动座1121可滑动地连接在行走底盘111的顶部,之字形支架1122的底部与滑动座1121连接,之字形支架1122的另一与载物架113连接,驱动器的驱动轴与滑动座1121连接,驱动器用于驱使滑动座1121滑动,进而驱使之字形支架1122升降移动。当之字形支架1122处于折叠状态时,之字形支架1122整体收缩折叠在行走底盘111的顶部,折叠后的之字形支架1122整体高度小,方便搬运车11穿梭移动;当之字形支架1122处于伸展状态时,之字形支架1122伸展高度大,方便转移物品。
35.可选地,之字形支架1122包括两个相对设置的折叠架以及连接于两个折叠架之间的多根连杆,两个折叠架均包括多根第一联动杆和多根第二联动杆,各第一联动杆与各第
二联动杆交叉连接,第一联动杆的两端与相邻的两根第二联动杆可转动地连接,折叠架底部的一第一联动杆和一第二联动杆均与滑动座1121连接,折叠架顶部的一第一联动杆和一第二联动杆均与载物架113的底部可滑动地连接。
36.在其他实施例中,升降机构112包括伺服电机、丝杆和升降座,丝杆沿竖直方向设置,伺服电机通过减速器与丝杆连接,升降座与丝杆螺纹连接,载物架113与升降座连接,伺服电机1511驱使丝杆正、反转实现载物架113的升降动作。
37.在其他实施例中,升降机构112包括气缸或油缸,气缸或油缸通过多级升降轴与载物架113连接,气缸或油缸通过多级升降轴实现载物架113的升降动作。
38.可选地,搬运系统还包括控制系统13和至少一个摄像监控系统14,控制系统13分别与搬运车11、摄像监控系统14电性连接,摄像监控系统14用于拍摄置物架12和搬运车11所处的空间,控制系统13根据摄像监控系统14拍摄的内容以及接收的任务规划搬运车11的行走路线以及物品的摆放位置。当控制系统13接收到搬运任务时,按照机器动作指令拆卸任务,并规划任务路径,确定路径节点指令,形成搬运车11的动作任务集,最后将任务集发送至对应任务的搬运车11,搬运车11按任务集顺序执行任务,具体请参照上述的搬运系统作业过程。
39.可选地,如图4所示,第一承载台1132的上表面固定有第一导向板1133,第二承载台1134的上表面固定有第二导向板1135,第一导向板1133与第二导向板1135相对设置;当承载面1131放置有物品时,物品位于第一导向板1133与第二导向板1135之间。
40.可选地,如图4所示,载物架113还包括第三承载台1136,第三承载台1136位于第一承载台1132与第二承载台1134之间,第三承载台1136的上表面为承载面1131,第一承载台1132与第三承载台1136之间以及第二承载台1134与第三承载台1136之间均具有避让空间101。当载物架113上放置有物品时,物品的底部压在第一承载台1132、第二承载台1134和第三承载台1136上。
41.可选地,第三承载台1136的上表面固定有第一限位板1137和第二限位板1138,第一限位板1137与第二限位板1138相对地设置于第三承载台1136的两端,第一导向板1133、第二导向板1135、第一限位板1137和第二限位板1138围合成放置物品的区间。
42.可选地,载物架113还包括托板1139,第一承载台1132、第二承载台1134、第三承载台1136均固定于托板1139的上表面,托板1139的下表面与升降机构112连接。在本实施例中,第一承载台1132、第二承载台1134和第三承载台1136的底部均通过多根立柱固定在托板1139上。
43.可选地,支撑架121包括纵梁1211,纵梁1211沿水平方向设置;置物臂122包括相互间隔设置的第一置物梁1221和第二置物梁1225,第一置物梁1221、第二置物梁1225与纵梁1211固定连接,第一置物梁1221和第二置物梁1225横跨纵梁1211设置,例如第一置物梁1221和第二置物梁1225的长度方向与纵梁1211的长度方向相互垂直,第一置物梁1221和第二置物梁1225在纵梁1211的一侧形成第一置物部122a,第一置物梁1221和第二置物梁1225在纵梁1211的另一侧形成第二置物部122b。搬运车11可移动至第一置物部122a或第二置物部122b的下方,使第一置物部122a或第二置物部122b插入载物架113的避让空间101中,当升降机构112驱使载物架113下降回位可使物品留在第一置物部122a或第二置物部122b上。
44.可选地,第一置物梁1221包括第一置物段1222和第二置物段1223,第一置物段
1222的一端固定于纵梁1211的一侧面,第一置物段1222的另一端向着远离纵梁1211的方向水平延伸;第二置物段1223的一端固定于纵梁1211的另一侧面,第二置物段1223的另一端向着远离纵梁1211的方向水平延伸。第二置物梁1225包括第三置物段1226和第四置物段1227,第三置物段1226的一端固定于纵梁1211的一侧面,第三置物段1226的另一端向着远离纵梁1211的方向水平延伸,第三置物段1226与第一置物段1222平行且相对设置,第一置物段1222和第三置物段1226共同组成第一置物部122a;第四置物段1227的一端固定于纵梁1211的另一侧面,第四置物段1227的另一端向着远离纵梁1211的方向水平延伸,第四置物段1227与第二置物段1223平行且相对设置,第二置物段1223和第四置物段1227共同组成第二置物部122b。
45.可选地,支撑架121还包括多根支撑柱1212,多根支撑柱1212沿竖直方向设置,多根支撑柱1212的底部固定设置,多根支撑柱1212的顶部与纵梁1211固定连接,多根支撑柱1212沿着纵梁1211的长度方向相互间隔设置,至少两根相邻的支撑柱1212之间形成有供搬运车11穿行的通道102,即搬运车11能从置物架12的一侧穿过通道102移动至置物架12的另一侧,有利于实现库区平面的最大化道路利用,能够更加便捷的完成物品的转移作业。
46.可选地,图5是本发明的传送机构与置物架的结构示意图,如图2、图3和图5所示,搬运系统还包括传送机构15,控制系统13与传送机构15电性连接,传送机构15包括驱动组件151、第一传送带152和第二传送带153,驱动组件151连接于纵梁1211或置物臂122,第一传送带152连接于第一置物梁1221,第二传送带153连接于第二置物梁1225,驱动组件151用于驱动第一传送带152和第二传送带153传送物品。在本实施例中,第一传送带152和第二传送带153均呈环状,第一传送带152环绕在第一置物段1222和第二置物段1223上表面和下表面,第二传送带153环绕在第三置物段1226和第四置物段1227上表面和下表面,第一传送带152和第二传送带153可将物品从第一置物部122a传送至第二置物部122b,或者从第二置物部122b传送至第一置物部122a,能够大大提高搬运效率。
47.可选地,第一置物梁1221的相对两端均设有第一从动轮1224,第一传送带152套设于两个第一从动轮1224,即两个第一从动轮1224与第一传送带152的内表面接触;第二置物梁1225的相对两端均设有第二从动轮1228,第二传送带153套设于两个第二从动轮1228,即两个第二从动轮1228与第二传送带153的内表面接触;驱动组件151包括电机1511、齿轮组1512、联动轴1513、第一主动轮1514和第二主动轮1515,电机1511与齿轮组1512连接,联动轴1513与齿轮组1512连接,第一主动轮1514、第二主动轮1515与联动轴1513连接,第一主动轮1514与第一传送带152联动连接,第二主动轮1515与第二传送带153联动连接。在本实施例中,齿轮组1512包括第一齿轮和第二齿轮,第一齿轮与电机1511的驱动轴固定连接,第二齿轮与联动轴1513固定连接,第一齿轮与第二齿轮相互啮合,电机1511驱使第一齿轮转动时,第一齿轮带动第二齿轮、联动轴1513、第一主动轮1514和第二主动轮1515同步转动,第一主动轮1514带动第一传送带152移动,第二主动轮1515带动第二传送带153移动。
48.可选地,第一主动轮1514与第一传送带152之间能通过啮合结构进行传动,或者通过摩擦力进行传动;第二主动轮1515与第二传送带153之间能通过啮合结构进行传动,或者通过摩擦力进行传动,根据实际需要可自由设计。
49.在其他实施例中,驱动组件151包括第一电机、第二电机、第一驱动轮和第二驱动轮;第一电机固定在纵梁1211或第一置物梁1221上,第一电机与第一驱动轮连接,第一驱动
轮与第一传送带152连接,第一电机通过第一驱动轮驱使第一传送带152移动;第二电机固定在纵梁1211或第二置物梁1225上,第二电机与第二驱动轮连接,第二驱动轮与第二传送带153连接,第二电机通过第二驱动轮驱使第二传送带153移动。
50.可选地,传送机构15还包括编码器154和传感器(图未示),编码器154分别与电机1511、传感器电性连接,编码器154用于记录第一传送带152和第二传送带153上的物品位置,传感器用于获取物品的信息,该信息包括物品的重量、编号、物品的种类等,但并不以此为限。
51.可选地,如图1所示,搬运系统包括至少两个置物架12,至少一个置物架12设有至少一个供搬运车11穿行的通道102,置物臂122位于通道102的上方,搬运车11可从通道102中穿行,并将物品从一所述置物架12搬运至另一置物架12。
52.搬运车11在两个置物架12之间转移物品的过程包括:
53.第一,搬运车11按照规划的路线移动至一置物架12附近,升降机构112驱使载物架113抬升至设定高度,搬运车11继续移动至置物臂122的端部;
54.第二,该置物架12上的传送机构15启动将物品传送至载物架113上;
55.第三,升降机构112下降回位,并承载物品移动至另一置物架12附近;
56.第四,升降机构112驱使载物架113抬升至设定高度(沿竖直方向抬升),保证置物臂122能够水平插入载物架113的避让空间101为准。
57.第五,搬运车11向着靠近置物臂122的方向移动,直至置物臂122逐渐插入载物架113的避让空间101中,此时置物臂122与载物架113耦合。
58.第六,升降机构112驱使载物架113下降回位使物品留在置物臂122上,完成物品的转移存放作业。
59.值得一提的是,第一置物梁1221和第二置物梁1225上可不设置传送机构15,即第一置物梁1221不设置第一传送带152,第二置物梁1225不设置第二传送带153。
60.以上结合附图详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。