一种amhs系统中的防撞控制装置及其方法
技术领域
1.本发明属于半导体生产加工设备技术领域,涉及一种amhs系统中的防撞控制装置及其方法。
背景技术:
2.半导体领域内,晶圆厂普遍使用自动物料传输系统(amhs)来提高工厂的自动化程度,更加智能地去管理厂内物料的运输与工艺流程管理。轨道是自动物料传输系统中重要子系统,主要负责自动物料传输系统所有物料搬运小车(oht)运行路线规划及控制。
3.由于晶圆厂内设置有成千上万道的加工工艺,必需靠物料搬运小车在自动物料传输系统中各种不同支线的轨道内快速且有效的穿梭移动,即时且精准的把控物料搬运小车在叉路口优先通行许可的前后秩序。尤其在两车或多车相互交汇时,多车轨道汇流防撞控制系统则是至关重要的叉路口汇流辅助机构。
4.由于运输轨道的复杂交错,小车运动轨迹基本可以划分为分流通过(由主干道通往其它支干道)、汇流通过(由各支干道通往主干道)、和并流通过(干道之间相互无交叉)。而在汇流通过时,尤其在两车或多车相互交汇时,主要存在以下不足:1、因透过网络通讯的层层传递,会因通讯速度较慢,造成剎车控制反应不够及时,再加上刹车距离不够刹车惯性的物理距离,易导致两个或多个物料搬运小车的碰撞或追撞;2、由于小车有时会为了避让,被迫停止在交汇口的转弯处,而停止在弯道处的小车在重新进行启动时,由于需要克服弯道处带来的离心力,需要更大的功率才能在弯道处进行重启通过,因弯道启动,电流过大,致使物料搬运小车很容易产生超载烧毁,无法在弯道停车后重新启动。
5.所以,对于本领域内的技术人员,还有待对现有技术中的防撞控制装置及系统进行改进,以克服上述的不足。
技术实现要素:
6.本发明的第一个目的是针对现有的技术存在上述问题,提出了一种amhs系统中的防撞控制装置,本发明所要解决的技术问题是如何防止来自不同轨道上的天车在汇流处发生碰撞。
7.本发明的第一个目的可通过下列技术方案来实现:一种amhs系统中的防撞控制装置,包括具有分叉口的轨道,所述的轨道包括主轨道和与主轨道汇流的分叉轨道,主轨道与分叉轨道相交于汇流点,主轨道与分叉轨道供天车通行,所述主轨道的外侧固定有光带一,所述分叉轨道的外侧固定有光带二,所述的主轨道位于汇流点的后侧固定有若干光电传感器一,所述的分叉轨道上固定有若干光电传感器二,所述的天车上固定有能够识别光源的光电传感接收器,所述的轨道上还固定有汇流控制器,所述的光带一、光带二、光电传感器一、光电传感器二和光电传感接收器均与汇流控制器电连接。
8.本amhs系统中的防撞控制装置,其工作原理是这样的:
9.1、当光电传感器一和光电传感器二检测不到主轨道或分叉轨道内有天车时,光带
一与光带二均会点亮,表示主轨道与分叉轨道均可以供天车通行;
10.2、当天车进入主轨道位于汇流点的后方时,即进入主轨道的通行许可检查路段,进入主轨道的天车上的光电传感接收器会收到光带一的光源,表示主轨道上的天车可以通行,所以天车保持继续行进状态;同时,因为光电传感器一检测到主轨道有天车进入,会通过汇流控制器来关闭光带二的光源,使之熄灭,分叉轨道因此变成不可通状态;此时若有天车进入分叉轨道时,即先进入分叉轨道的通行许可检查路段,因为进入分叉轨道的天车上的光电传感接收器收不到光带二的光源,分叉轨道上的天车会立即暂停等待;
11.3、当主轨道上的天车进入汇流点的前方时,光电传感器一检知不到天车时,通过汇流控制器会重新点亮光带二,使分叉轨道的天车上的光电传感接收器可以接收到光带二的光源后,分叉轨道上的天车才可以继续通行;同时,因为光电传感器二检测到分叉轨道有天车进入,汇流控制器会关闭光带一的光源使之熄灭,以使主轨道位于汇流点的后方无法通行天车;
12.4、当分叉轨道上的天车进入汇流点的前方时,光电传感器二检知不到天车时,通过汇流控制器才会再度把光带一点亮;
13.5、动作反之亦相同。
14.在上述的amhs系统中的防撞控制装置中,相邻所述的光电传感器一之间的间距小于天车的长度,相邻所述的光电传感器二之间的间距小于天车的长度。
15.采用上述的技术方案,就可以使天车在主轨道位于汇流点的后侧的任何一个位置都可以被检知到,或者是使天车在分叉轨道内的任何一个位置都可以被检知到。
16.在上述的amhs系统中的防撞控制装置中,所述的主轨道位于汇流点的前侧固定有若干光电传感器三,所述的光电传感器三与汇流控制器电连接。
17.采用上述的技术方案,当光电传感器三检知到主轨道位于汇流点的前侧处有天车通过时,通过汇流控制器会使主轨道或者是分叉轨道上处于熄灭状态的光带一或者光带二重新点亮。
18.在上述的amhs系统中的防撞控制装置中,所述的主轨道上位于汇流点与光电传感器三之间固定有若干光电传感器四,所述的光电传感器四与汇流控制器电连接。
19.采用上述的技术方案,当光电传感器四检知到主轨道位于汇流点的前侧处有天车通过时,通过汇流控制器可以实时监测天车位于主轨道上的位置。
20.在上述的amhs系统中的防撞控制装置中,相邻所述的光电传感器四之间的间距小于天车的长度。
21.采用上述的技术方案,就可以使天车在主轨道位于汇流点的前侧的任何一个位置都可以被检知到,从而确定天车的实时位置。
22.在上述的amhs系统中的防撞控制装置中,所述的光电传感器一、光电传感器二、光电传感器三和光电传感器四均为反射式光电传感器。
23.在上述的amhs系统中的防撞控制装置中,所述的光电传感接收器为对照式光电传感器。
24.在上述的amhs系统中的防撞控制装置中,所述的主轨道与分叉轨道之间固定有遮光板。
25.在上述的amhs系统中的防撞控制装置中,所述的汇流控制器为plc控制器、单片机
或计算机。
26.本发明的第二个目的是针对现有的技术存在上述问题,提出了一种amhs系统中的防撞控制方法,本发明所要解决的技术问题是如何精确控制不同轨道上的天车在汇流点有序通过。
27.本发明的第二个目的可通过下列技术方案来实现:一种amhs系统中的防撞控制方法,包括以下步骤:
28.s1、在主轨道位于汇流点的后方设置信号读取区域,在分叉轨道位于汇流点的后方设置信号读取区域;
29.s2、当主轨道上的信号读取区域读取到该路段上的天车信号,其它路段无读取信号时,将读取到的信号信息发送给汇流控制器,由汇流控制器控制主轨道产生通过信号,其它路段产生禁止通行信号;
30.s3、当主轨道上的信号读取区域读取到该路段上的天车信号,其它路段也读取到天车信号时,若主轨道的触发时间优先于其它路段的触发时间时,将读取到的信号信息发送给汇流控制器,由汇流控制器控制主轨道产生通过信号,其它路段产生禁止通行信号;
31.s4、当主轨道上的天车通过汇流点处,由汇流控制器触发相应的轨道产生汇流通过信号时,其它路段禁止通行信号消失,其它路段天车允许通过,并且重新进入开关控制逻辑;
32.s5、当分叉轨道上的信号读取区域读取到该路段上的天车信号,其它路段无读取信号时,将读取到的信号信息发送给汇流控制器,由汇流控制器控制分叉轨道产生通过信号,其它路段产生禁止通行信号;
33.s6、当分叉轨道上的信号读取区域读取到该路段上的天车信号,其它路段也读取到天车信号时,若分叉轨道的触发时间优先于其它路段的触发时间时,将读取到的信号信息发送给汇流控制器,由汇流控制器控制分叉轨道产生通过信号,其它路段产生禁止通行信号;
34.s7、当分叉轨道上的天车通过汇流点处,由汇流控制器触发相应的轨道产生汇流通过信号时,其它路段禁止通行信号消失,其它路段天车允许通过,并且重新进入开关控制逻辑;
35.s8、重复s2-s7的动作。
36.所述的步骤s1中的信号读取区域设置在远离汇流点以及分叉轨道上的转弯处。
37.采用这样的设计,可以避免天车被迫停止在弯道处。
38.所述的步骤s1中的信号读取区域距离汇流点之间的间距不小于天车的长度。
39.采用这样的设计,可以避免出现前车未完全离开,后车紧跟发生追尾碰撞。
40.与现有技术相比,本发明具有以下优点:
41.1、本发明通过在主轨道位于汇流点的后侧固定若干光电传感器一,分叉轨道上固定若干光电传感器二,就可以检知天车是否在主轨道上或是分叉轨道通行;通过在主轨道位于汇流点的前侧固定若干光电传感器三,当光电传感器三检知到在主轨道上有天车通过时,就可以使处于熄灭状态的光带一或者光带二重新点亮;通过在主轨道上位于汇流点与光电传感器三之间固定若干光电传感器四,通过汇流控制器可以实时监测天车位于主轨道上的位置。
42.2、本发明通过设置遮光板,以防止主轨道上的光带一与分叉轨道上的光带二相互影响主轨道与分叉轨道上的天车管制。
43.3、本发明通过在主轨道和各分叉轨道上设置信号读取区域和汇流控制器,可使主轨道和分叉轨道上的天车有序通过,提高天车的输送效率。
附图说明
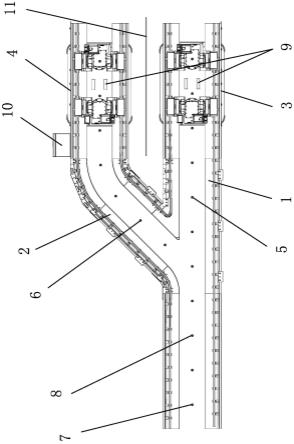
44.图1为本发明的俯视图;
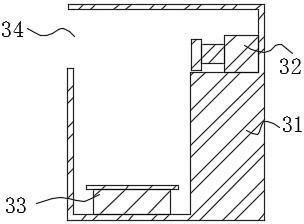
45.图2为本发明的立体图。
46.图中:1、主轨道;2、分叉轨道;3、光带一;4、光带二;5、光电传感器一;6、光电传感器二;7、光电传感器三;8、光电传感器四;9、光电传感接收器;10、汇流控制器;11、遮光板。
具体实施方式
47.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
48.如图1-2所示,一种amhs系统中的防撞控制装置,包括具有分叉口的轨道,轨道包括主轨道1和与主轨道1汇流的分叉轨道2,主轨道1与分叉轨道2相交于汇流点,主轨道1与分叉轨道2供天车通行,在主轨道1的外侧固定有光带一3,分叉轨道2的外侧固定有光带二4,主轨道1位于汇流点的后侧固定有若干光电传感器一5,分叉轨道2上固定有若干光电传感器二6,天车上固定有能够识别光源的光电传感接收器9,轨道上还固定有汇流控制器10,且光带一3、光带二4、光电传感器一5、光电传感器二6和光电传感接收器9均与汇流控制器10电连接。相邻光电传感器一5之间的间距小于天车的长度,相邻光电传感器二6之间的间距小于天车的长度,这样就可以使天车在主轨道1位于汇流点的后侧的任何一个位置都可以被检知到,或者是使天车在分叉轨道2内的任何一个位置都可以被检知到。
49.具体来说,主轨道1位于汇流点的前侧固定有若干光电传感器三7,光电传感器三7与汇流控制器10电连接。当光电传感器三7检知到主轨道1位于汇流点的前侧处有天车通过并脱离时,通过汇流控制器10会使主轨道1或者是分叉轨道2上处于熄灭状态的光带一3或者光带二4重新点亮。
50.更具体来说,主轨道1上位于汇流点与光电传感器三7之间固定有若干光电传感器四8,光电传感器四8与汇流控制器10电连接。当光电传感器四8检知到主轨道1位于汇流点的前侧处有天车通过时,通过汇流控制器10可以实时监测天车位于主轨道1上的位置。相邻光电传感器四8之间的间距小于天车的长度,这样就可以使天车在主轨道1位于汇流点的前侧的任何一个位置都可以被检知到,从而确定天车的实时位置。
51.在本实施例中,光电传感器一5、光电传感器二6、光电传感器三7和光电传感器四8均为反射式光电传感器,光电传感接收器9为对照式光电传感器,汇流控制器10为plc控制器、单片机或计算机,且均为市场上可以买到的现有产品。
52.在本实施例中,在主轨道1与分叉轨道2之间固定有遮光板11,以防止主轨道1上的光带一3与分叉轨道2上的光带二4相互影响主轨道1与分叉轨道2上的天车管制。
53.当天车进入汇流区域的检知方式采用入口/出口侦测的控制方式时,光电传感器一5、光电传感器二6和光电传感器三7的配置至少要2个以上,同时光电传感器一5、光电传
感器二6和光电传感器三7之间的配置间距,间隔距离必须要小于一个车身的长度,保证天车在此区域内任何一个位置都可以被检测到;若采用全区域实时动态天车侦测方式时,则必须在入口与出口间的空白区域,补满光电传感器四8,间隔距离同样要小于一个车身的长度。
54.在对主轨道1安装光带一3,分叉轨道2安装光带二4时,光带一3的配置可依实际布局的需求而配置在主轨道1的左侧或右侧,光带二4的配置可依实际布局的需求而配置在分叉轨道2的左侧或右侧,而光电传感接收器9一般安装在天车上,且与主轨道1的左侧或右侧无障碍,与分叉轨道2的左侧或右侧无障碍。光带一3和光带二4的各个光源点在发光时会有
±
30
°
的散射角度,同时光源点的间隔距离必须小于200mm以便形成连续光源,以使天车上的光电传感接收器9在读取时不至于断光而误判为光带一3或者光带二4熄灭而停车。
55.本amhs系统中的防撞控制装置,其工作原理是这样的:
56.1、当光电传感器一5、光电传感器二6、光电传感器三7和光电传感器四8检测不到主轨道1或分叉轨道2内有天车时,光带一3与光带二4均会点亮,表示主轨道1与分叉轨道2均可以供天车通行;
57.2、当天车进入主轨道1位于汇流点的后方时,即进入主轨道1的通行许可检查路段,进入主轨道1的天车上的光电传感接收器9会收到光带一3的光源,表示主轨道1上的天车可以通行,所以天车保持继续行进状态;同时,因为光电传感器一5检测到主轨道1有天车进入,会通过汇流控制器10来关闭光带二4的光源,使之熄灭,分叉轨道2因此变成不可通状态;此时若有天车进入分叉轨道2时,即先进入分叉轨道2的通行许可检查路段,因为进入分叉轨道2的天车上的光电传感接收器9收不到光带二4的光源,分叉轨道2上的天车会立即暂停等待;
58.3、当主轨道1上的天车进入汇流点的前方时,光电传感器四8会检知到天车,并实时监测其位置,且光电传感器一5检知不到天车,此时表示天车已经进入汇流轨道,待其通行指定路段后,光电传感器三7会检知到天车并脱离,也就是光电传感器一5、光电传感器四8和光电传感器三7均检知不到天车时,此时表示汇流点的前方以保留足够安全距离,通过汇流控制器10会重新点亮光带二4,使分叉轨道2的天车上的光电传感接收器9可以接收到光带二4的光源后,分叉轨道2上的天车才可以继续通行;同时,因为光电传感器二6检测到分叉轨道2有天车进入,汇流控制器10会关闭光带一3的光源使之熄灭,以使主轨道1位于汇流点的后方(即通行许可检查路段)无法通行天车;
59.4、当分叉轨道2上的天车进入汇流点的前方时,光电传感器四8会检知到天车,并实时监测其位置,且光电传感器二6检知不到天车,此时表示天车已经进入汇流轨道,待其通行指定路段后,光电传感器三7会检知到天车并脱离,也就是光电传感器二6、光电传感器四8和光电传感器三7均检知不到天车时,此时表示汇流点的前方以保留足够安全距离,通过汇流控制器10才会再度把光带一3点亮;
60.5、动作反之亦相同。
61.一种amhs系统中的防撞控制方法,包括以下步骤:
62.s1、在主轨道位于汇流点的后方设置信号读取区域,在分叉轨道位于汇流点的后方设置信号读取区域;
63.s2、当主轨道上的信号读取区域读取到该路段上的天车信号,其它路段无读取信
号时,将读取到的信号信息发送给汇流控制器,由汇流控制器控制主轨道产生通过信号,其它路段产生禁止通行信号;
64.s3、当主轨道上的信号读取区域读取到该路段上的天车信号,其它路段也读取到天车信号时,若主轨道的触发时间优先于其它路段的触发时间时,将读取到的信号信息发送给汇流控制器,由汇流控制器控制主轨道产生通过信号,其它路段产生禁止通行信号;
65.s4、当主轨道上的天车通过汇流点处,由汇流控制器触发相应的轨道产生汇流通过信号时,其它路段禁止通行信号消失,其它路段天车允许通过,并且重新进入开关控制逻辑;
66.s5、当分叉轨道上的信号读取区域读取到该路段上的天车信号,其它路段无读取信号时,将读取到的信号信息发送给汇流控制器,由汇流控制器控制分叉轨道产生通过信号,其它路段产生禁止通行信号;
67.s6、当分叉轨道上的信号读取区域读取到该路段上的天车信号,其它路段也读取到天车信号时,若分叉轨道的触发时间优先于其它路段的触发时间时,将读取到的信号信息发送给汇流控制器,由汇流控制器控制分叉轨道产生通过信号,其它路段产生禁止通行信号;
68.s7、当分叉轨道上的天车通过汇流点处,由汇流控制器触发相应的轨道产生汇流通过信号时,其它路段禁止通行信号消失,其它路段天车允许通过,并且重新进入开关控制逻辑;
69.s8、重复s2-s7的动作。
70.步骤s1中的信号读取区域设置在远离汇流点以及分叉轨道上的转弯处,可以避免天车被迫停止在弯道处。
71.步骤s1中的信号读取区域距离汇流点之间的间距不小于天车的长度,可以避免出现前车未完全离开,后车紧跟发生追尾碰撞。
72.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
73.尽管本文较多地使用了1、主轨道;2、分叉轨道;3、光带一;4、光带二;5、光电传感器一;6、光电传感器二;7、光电传感器三;8、光电传感器四;9、光电传感接收器;10、汇流控制器;11、遮光板等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。