1.本发明涉及电力设备技术领域,具体为一种防坠落的带电作业机器人。
背景技术:
2.电力检修时经常需要带电爬到电线杆上进行接线,带电操作危险性高,存在安全隐患,且需要登高,工人劳动强度较大。对于一些简单的接线工作,可以交由机器人完成,因此如何将机器人输送到电线杆顶端是最为重要,现有的登高车成本大,其登高距离有限,在不平坦的山区也难以展开。因此,需要设计一种电力作业机器人移动装置,将带电作业机器人输送到目标位置。
3.中国专利公开了申请号为cn 111055294 a的一种电力作业机器人移动装置,包括抱箍装置、夹紧装置和横移装置,夹紧装置包括夹紧气缸和夹紧块,夹紧气缸固定在抱箍装置上,夹紧块固定在夹紧气缸的伸缩杆上;横移装置包括固定环、导轨、滑块、横移驱动结构,固定环与抱箍装置连接,导轨与固定环固定,滑块与导轨滑动连接,横移驱动结构设置在滑块上且驱动滑块横移,其通过上述构件解决了人工作业时需要断电的问题,利用机械手取代人工,既能够完成分支线任务又可以保证作业时段电力的正常运行,并且减少了工人高空作业的情况。
4.但是,目前的带电作业机器人都是由电力系统进行驱动,电力系统相较于传统的机械驱动具有启动块、无污染且使用成本底的优点,但是电力设备也普遍存在突发性的电力中断或者设备故障问题,这对于攀爬在电线杆外壁的带电作业机器人来说是致命的故障,一旦电力中断,驱动力瞬间消失,其会直接从电线杆外壁向下高速坠落,轻则造成零部件的损坏,重则导致机器人整体的报废,甚至引发火灾,造成不可估量的经济损失,因此,我们提出一种可以防坠落的带电作业机器人。
技术实现要素:
5.基于此,本发明的目的是提供一种防坠落的带电作业机器人,以解决上述背景中提到的技术问题。
6.为实现上述目的,本发明提供如下技术方案:一种防坠落的带电作业机器人,包括:
7.行进外框,行进外框由两部分组成,安装时分别将两组行进外框放置在电线杆外壁,并使得内置电机驱动轮和辅助轮均抵在电线杆外壁,随后通过螺栓固定两组行进外框即可;
8.第一控制箱和横臂,第一控制箱安装在行进外框的外壁,用以对电子设备进行以及驱动设备电源进行控制,横臂则安装在行进外框的顶端端部,且横臂与行进外框顶端端部滑动连接,从而满足横臂的全方位转动;
9.第二控制箱和滑块,均安装在横臂上,滑块与横臂滑动连接,且滑块通过第二控制箱可在横臂上实现直线移动;
10.作业机器人组件,安装在滑块上,通过滑块的带动实现直线移动,从而完成对线缆作业任务。
11.通过采用上述技术方案,通过行进外框将整个作业机器人组件和附件均带动至作业区域,再通过遥控装置对作业机器人组件进行控制,使得作业机器人组件能够完成预定的作业任务。
12.本发明进一步设置为,所述行进外框的内侧设置有辅助轮组件,辅助轮组件包括有位于行进外框、电线杆之间且与电线杆外壁紧密贴合设置的辅助轮,所述辅助轮的外侧安装有安装块,且安装块的端部连接有延伸至行进外框内部的安装杆。
13.通过采用上述技术方案,使得辅助轮辅助行进外框的移动。
14.本发明进一步设置为,所述行进外框的内侧还设置有内置电机驱动轮,且内置电机驱动轮由两组宽边轮构成,而两组宽边轮之间连接有驱动轴。
15.通过采用上述技术方案,内置电机驱动轮采用宽边轮能够增加其摩擦力即攀爬力,从而防止打滑的现象发生。
16.本发明进一步设置为,所述内置电机驱动轮的内侧安装有用于对内置电机驱动轮进行限位的驱动轮限位组件,所述驱动轮限位组件包括有安装在驱动轴外壁并与第一控制箱电性连接的第一电磁铁,且第一电磁铁与驱动轴外壁通过轴承转动连接,所述第一电磁铁的两端均设置有金属限位板,且金属限位板的内侧安装有与第一电磁铁端面连接的复位弹簧,此外,在内置电机驱动轮被驱动状态下,所述金属限位板处于被第一电磁铁吸合的状态,且复位弹簧也处于压缩态,所述金属限位板的端面拆卸设置有橡胶摩擦层。
17.通过采用上述技术方案,使得在突发性断电的情况下,内置电机驱动轮得以被限位,防止内置电机驱动轮空转导致行进外框坠落。
18.本发明进一步设置为,所述行进外框的端面安装有用于辅助辅助轮组件运行的辅助轮限位组件,所述辅助轮限位组件包括有位于安装杆外侧且开设在行进外框端面的滑槽,所述滑槽的内部安装有与安装杆外壁连接的强力弹簧,且强力弹簧在辅助轮竖直状态下处于拉伸状态,所述安装杆的一端位于行进外框的内部连接有与行进外框内壁滑动连接的吸附板,且吸附板的端面安装有与第一控制箱电性连接的第二电磁铁。
19.通过采用上述技术方案,辅助轮限位组件通过对辅助轮的转动效果,使得断电情况下辅助轮会从竖直状态转动至水平状态,从而使得辅助轮不具有向下移动的趋势,并且横向设置的辅助轮还起到了阻碍行进外框移动的效果。
20.本发明进一步设置为,所述行进外框的内侧位于辅助轮组件的一侧安装有限位夹板组件,且限位夹板组件包括有设置在靠近电线杆外壁的限位夹板,所述限位夹板的端面设置有拆卸连接的摩擦层,且限位夹板的端部连接有丝杆,所述限位夹板的内壁设置有与丝杆外壁螺纹适配的螺纹壁,且限位夹板的端部位于丝杆的两侧均安装有与行进外框内壁连接的伸缩杆。
21.通过采用上述技术方案,限位夹板在行进外框突发性断电的情况下可以通过机械方式移动至电线杆外壁紧密贴合,增大行进外框的限位阻力,进一步防止坠落。
22.本发明进一步设置为,所述安装杆的外侧设置有传动组件,所述传动组件包括有设置在安装杆延伸至吸附板端面的延伸部外壁上的驱动杆,且驱动杆的外壁固定有驱动齿壁,所述驱动齿壁的一侧设置有安装在行进外框内部并与行进外框内壁转动连接的从动齿
轮,且从动齿轮与驱动齿壁啮合连接。
23.通过采用上述技术方案,传动组件通过安装杆的转动实现其自身的转动,在通过传动轴将驱动力传递至旋转组件,提供了动力,辅助旋转组件的运行。
24.本发明进一步设置为,所述安装杆的外侧设置有与丝杆活动连接的旋转组件,所述旋转组件包括有与从动齿轮端面固定连接的传动轴,且传动轴的一端固定连接有第一齿轮,所述第一齿轮的顶端啮合连接有传动齿环,且传动齿环与行进外框内壁滑动连接,所述传动齿环的底端啮合连接有第二齿轮,且第二齿轮与丝杆的一端固定连接。
25.通过采用上述技术方案,旋转组件带动丝杆转动,丝杆因此带动限位夹板移动,从而实现对限位夹板的驱动效果,使得限位夹板能够移动至与电线杆外壁贴合,进一步提升行进外框的限位阻力。
26.综上所述,本发明主要具有以下有益效果:
27.1、本发明通过设置辅助轮组件、辅助轮限位组件、内置电机驱动轮和驱动轮限位组件,在突发断电时,第一电磁铁和第二电磁铁均瞬间失去电磁吸附力,此时金属限位板会在复位弹簧的作用下复位,并且其会移动至端面的橡胶层与内置电机驱动轮外壁相接触,从而减缓内置电机驱动轮向下移动的趋势,增大内置电机驱动轮的转动阻力,实现对行进外框防坠落的第一阶段,进一步的,第二电磁铁失去电磁吸附力后,吸附板失去第二电磁铁的限位,因此安装杆会在强力弹簧的作用下沿着滑槽复位移动,两组安装杆的移动会带动辅助轮转动九十度,即辅助轮从竖直状态转动至水平状态,消除辅助轮向下移动的趋势,并且通过水平设置的辅助轮,进一步增加行进外框的移动阻力,实现行进外框防坠落的第二阶段,上述第一阶段与第二阶段的结合,使得行进外框在突发断电的情况下能够保持其当前位置不变,从而避免了坠落的情况发生;
28.2、本发明通过设置限位夹板组件、传动组件和旋转组件,在安装杆转动的同时,安装杆会带动驱动杆转动,驱动杆的转动会通过其外壁的驱动齿壁带动从动齿轮转动,从动齿轮因此会通过传动轴带动第一齿轮转动,第一齿轮转动后会驱使传动齿环转动,传动齿环转动后则带动第二齿轮转动,第二齿轮的转动则会带动丝杆转动,丝杆转动后通过螺纹的驱动效果和伸缩杆的限位效果,使得限位夹板向靠近电线杆的方向移动,当安装杆恰好转动九十度后,限位夹板也恰好移动至与电线杆外壁紧密贴合,限位夹板通过其端面设置的摩擦层,进一步提升了行进外框的移动阻力,从而更加稳固了行进外框断电情况下的状态。
附图说明
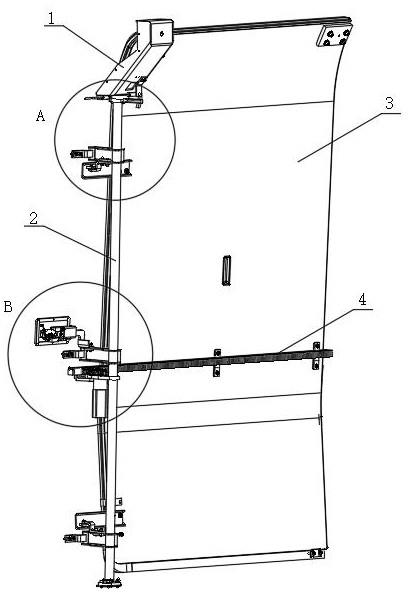
29.图1为本发明的整体结构示意图;
30.图2为本发明的俯视图;
31.图3为本发明图2中的a处局部放大图;
32.图4为本发明行进外框端面结构示意图;
33.图5为本发明的辅助轮限位组件结构示意图;
34.图6为本发明的行进外框俯视内部结构示意图;
35.图7为本发明图2中的b处局部放大图;
36.图8为本发明图6中的c处局部放大图。
37.图中:1、行进外框;2、电线杆;3、第一控制箱;4、横臂;5、第二控制箱;6、滑块;7、作业机器人组件;8、辅助轮组件;801、辅助轮;802、安装块;803、安装杆;9、内置电机驱动轮;10、驱动轮限位组件;1001、第一电磁铁;1002、金属限位板;1003、复位弹簧;11、限位夹板组件;1101、限位夹板;1102、摩擦层;1103、丝杆;12、伸缩杆;13、辅助轮限位组件; 1301、滑槽;1302、强力弹簧;1303、吸附板;1304、第二电磁铁;14、传动组件;1401、驱动杆;1402、驱动齿壁;1403、从动齿轮;15、旋转组件; 1501、传动轴;1502、第一齿轮;1503、传动齿环;1504、第二齿轮。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
39.下面根据本发明的整体结构,对其实施例进行说明。
40.一种防坠落的带电作业机器人,如图1所示,包括行进外框1、电线杆2、第一控制箱3、横臂4、第二控制箱5、滑块6和作业机器人组件7;
41.请参阅图2-3,在上述实施例中,行进外框1的内侧设置有辅助轮组件8,通过辅助轮组件8辅助行进外框1进行垂直方向的移动;
42.具体的,辅助轮组件8包括有位于行进外框1、电线杆2之间且与电线杆 2外壁紧密贴合设置的辅助轮801,辅助轮801的外侧安装有安装块802,且安装块802的端部连接有延伸至行进外框1内部的安装杆803
43.请参阅图7,在上述实施例中,行进外框1的内侧设置有内置电机驱动轮 9,内置电机驱动轮9通过外界供给电能即可自行驱动,从而为行进外框1的移动提供必要的动力,进一步的,内置电机驱动轮9由两组宽边轮构成,且两组宽边轮之间连接有驱动轴,通过两组宽边轮进行行进外框1的爬升可有效增大摩擦,从而防止空转打滑的现象,保证了行进外框1移动的稳定性;
44.请参阅图7,在上述实施例中,内置电机驱动轮9的内侧安装有用于对内置电机驱动轮9进行限位的驱动轮限位组件10;
45.具体的,驱动轮限位组件10包括有安装在驱动轴外壁并与第一控制箱3 电性连接的第一电磁铁1001,且第一电磁铁1001与驱动轴外壁通过轴承转动连接,第一电磁铁1001的两端均设置有金属限位板1002,且金属限位板1002 的内侧安装有与第一电磁铁1001端面连接的复位弹簧1003,此外,在内置电机驱动轮9被驱动状态下,金属限位板1002处于被第一电磁铁1001吸合的状态,且复位弹簧1003也处于压缩态,金属限位板1002的端面拆卸设置有橡胶摩擦层。
46.请参阅图5,在上述实施例中,行进外框1的端面安装有用于辅助辅助轮组件8运行的辅助轮限位组件13;
47.具体的,辅助轮限位组件13包括有位于安装杆803外侧且开设在行进外框1端面的滑槽1301,滑槽1301的内部安装有与安装杆803外壁连接的强力弹簧1302,且强力弹簧1302在辅助轮801竖直状态下处于拉伸状态,安装杆 803的一端位于行进外框1的内部连接有与行进外框1内壁滑动连接的吸附板 1303,且吸附板1303的端面安装有与第一控制箱3电性
连接的第二电磁铁 1304。
48.请参阅图2和图6,在本实施例中,进一步设置了位于行进外框1内侧的限位夹板组件11,通过限位夹板1101为行进外框1提供了更进一步的限位保障;
49.具体的,限位夹板组件11包括有设置在靠近电线杆2外壁的限位夹板 1101,限位夹板1101的端面设置有拆卸连接的摩擦层1102,且限位夹板1101 的端部连接有丝杆1103,限位夹板1101的内壁设置有与丝杆1103外壁螺纹适配的螺纹壁,且限位夹板1101的端部位于丝杆1103的两侧均安装有与行进外框1内壁连接的伸缩杆12。
50.请参阅图5、图6和图8,限位夹板组件11中的限位夹板1101需要通过移动来实现夹紧限位的效果,因此需要驱动构件为限位夹板1101提供驱动力;
51.在本实施例中,优选的采用与丝杆1103活动连接的传动组件14和旋转组件15,通过传动组件14将安装杆803转动的力对从动齿轮1403进行驱动,在通过从动齿轮1403、第一齿轮1502对第二齿轮1504进行驱动,最终实现对丝杆1103的稳定驱动,从而实现了限位夹板1101的移动;
52.具体的,传动组件14包括有设置在安装杆803延伸至吸附板1303端面的延伸部外壁上的驱动杆1401,且驱动杆1401的外壁固定有驱动齿壁1402,驱动齿壁1402的一侧设置有安装在行进外框1内部并与行进外框1内壁转动连接的从动齿轮1403,且从动齿轮1403与驱动齿壁1402啮合连接,旋转组件15包括有与从动齿轮1403端面固定连接的传动轴1501,且传动轴1501的一端固定连接有第一齿轮1502,第一齿轮1502的顶端啮合连接有传动齿环 1503,且传动齿环1503与行进外框1内壁滑动连接,传动齿环1503的底端啮合连接有第二齿轮1504,且第二齿轮1504与丝杆1103的一端固定连接。
53.本发明的工作原理为:首先,将行进外框1安装在电线杆2外壁,使得辅助轮801、内置电机驱动轮9均与电线杆2外壁紧密贴合,随后通过第一控制箱3控制行进外框1向上移动,进而带动作业机器人组件7以及附件移动至作业区域;
54.在使用作业机器人组件7时,通过专用遥控设备对第一控制箱3、第二控制箱5进行控制,使得第二控制箱5控制滑块6在横臂4上的移动,第一控制箱3控制横臂4的转动,从而实现作业机器人组件7的位置变动,随后在控制作业机器人组件7,使得作业机器人组件7在操作人员的控制下完成既定的作业任务;
55.在突发断电时,内置电机驱动轮9瞬间失去动力,且第一电磁铁1001和第二电磁铁1304均瞬间失去电磁吸附力,此时金属限位板1002会在复位弹簧1003的作用下复位,并且其会移动至端面的橡胶层与内置电机驱动轮9外壁相接触,从而减缓内置电机驱动轮9向下移动的趋势,增大内置电机驱动轮9的转动阻力即增大行进外框1的移动阻力,实现对行进外框1防坠落的第一阶段;
56.进一步的,第二电磁铁1304失去电磁吸附力后,吸附板1303失去第二电磁铁1304的限位,因此安装杆803会在强力弹簧1302的作用下沿着滑槽1301复位移动,两组安装杆803的移动会带动辅助轮801转动九十度,即辅助轮801从竖直状态转动至水平状态,消除辅助轮801向下移动的趋势,并且通过水平设置的辅助轮801,进一步增加行进外框1的移动阻力,实现行进外框防坠落的第二阶段;
57.在安装杆803转动的同时,安装杆803会带动驱动杆1401转动,驱动杆 1401的转动会通过其外壁的驱动齿壁1402带动从动齿轮1403转动,从动齿轮1403因此会通过传动轴
1501带动第一齿轮1502转动,第一齿轮1502转动后会驱使传动齿环1503转动,传动齿环1503转动后则带动第二齿轮1504 转动,第二齿轮1504的转动则会带动丝杆1103转动,丝杆1103转动后通过螺纹的驱动效果和伸缩杆12的限位效果,使得限位夹板1101向靠近电线杆2 的方向移动,当安装杆803恰好转动九十度后,限位夹板1101也恰好移动至与电线杆2外壁紧密贴合,限位夹板1101通过其端面设置的摩擦层1102,进一步提升了行进外框1的移动阻力,从而更加稳固了行进外框断电情况下的状态;
58.随后,作业人员即可对行进外框进行施救,施救方法可视具体情况而定;
59.进一步的说,作业人员可以采取缓速降落法即推动行进外框向下移动,行进外框1在受到外力作用后会向下移动,因其受到的阻力较大,因此其可以缓慢移动至地面进行故障的处理;
60.再进一步的说,作业人员若无法采用缓速降落法,则只能采用拆卸法即作业人员利用外界工具移动至行进外框1附近,通过对行进外框1进行拆卸,使得其可以从电线杆2外壁移出,最后将其托运至地面进行故障处理即可;
61.最后需要说明的是,上述两个防坠落阶段基本是同时间完成的,即在一瞬间完成对行进外框1的防坠落处理,此外,在下次使用前,需要先将行进外框1通电,此时第一电磁铁1001和第二电磁铁1304均得电启动,随后金属限位板1002会被第一电磁铁1001吸附解除对内置电机驱动轮9的限位,而辅助轮801则需要人为转动复位,在辅助轮801复位后,限位夹板1101会自行复位。
62.尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。