1.本实施例涉及具有定位辅助系统的物料搬运车辆(materials handling vehicle),该定位辅助系统向驾驶车辆的操作者提供辅助。
背景技术:
2.已知的物料搬运车辆包括动力单元、桅杆组件和平台组件,该平台组件包括耦合到桅杆组件以使车辆相对于动力单元竖直移动的叉架(fork carriage)组件。
技术实现要素:
3.根据第一方面,一种物料搬运车辆包括动力单元;负载搬运组件;以及为驾驶车辆的操作者提供辅助的定位辅助系统。由定位辅助系统提供的辅助包括听觉、触觉或视觉提示中的至少一个,以指示以下项中的至少一个:从车辆到边界物体的距离;或者车辆相对于边界物体的航向。
4.听觉、触觉或视觉提示中的至少一个可以由定位辅助系统启动以指示以下项中的至少一个:车辆位于等于或大于距边界物体的期望距离的距离处;或者车辆相对于边界物体位于正确航向。
5.听觉、触觉或视觉提示中的至少一个可以由定位辅助系统启动以指示以下项中的至少一个:车辆不位于等于或大于距边界物体的期望距离的距离处;或者车辆相对于边界物体不位于正确航向。
6.听觉、触觉或视觉提示中的至少一个可以包括第一和第二提示。第一提示可以由定位辅助系统在以下项中的至少一个时启动:车辆位于等于或大于距边界物体的期望距离的距离处;或者车辆相对于边界物体位于正确航向。第二提示可以由定位辅助系统在以下项中的至少一个时启动:车辆不位于等于或大于距边界物体的期望距离的距离处;或者车辆相对于边界物体不位于正确航向。第一提示可以与第二提示区分开来。
7.听觉、触觉或视觉提示中的至少一个可以包括视觉提示。视觉提示可以由定位辅助系统在以下项中的至少一个上启动:显示设备;或者车辆前方和其右侧的地板表面,并且可以提供视觉提示以指示车辆必须向右转向以位于以下项中的至少一个:等于或大于距边界物体的期望距离的距离处;或者相对于边界物体的正确航向。附加地或可替代地,视觉提示可以由定位辅助系统在以下项中的至少一个上启动:显示设备;或者车辆前方和其左侧的地板表面,并且可以提供视觉提示以指示车辆必须向左转向以位于以下项中的至少一个:等于或大于距边界物体的期望距离的距离处;或者相对于边界物体的正确航向。
8.由定位辅助系统提供的辅助还可以包括附加的听觉、触觉或视觉提示中的至少一个,以指示以下项中的至少一个:从车辆到第二边界物体的距离;或者车辆相对于第二边界物体的航向。听觉、触觉或视觉提示中的至少一个可以与附加的听觉、触觉或视觉提示中的至少一个区分开来。当车辆位于以下两者时:等于或大于距第一和第二边界物体的期望距离的距离处;以及相对于第一和第二边界物体的正确航向,车辆可以能够由操作者使用远
程控制设备进行远程控制。当车辆没有位于以下项中的至少一个时:等于或大于距第一和第二边界物体中的至少一个的期望距离的距离处;或者相对于第一和第二边界物体中的至少一个的正确航向,车辆可能不能由操作者使用远程控制设备进行远程控制。
9.边界物体可以包括位于车辆右侧的第一边界物体,并且听觉、触觉或视觉提示中的至少一个可以包括第一、第二和第三提示。第一提示可以由定位辅助系统在以下项中的至少一个时启动:车辆位于等于或大于距第一边界物体和位于车辆左侧的第二边界物体两者的期望距离的距离处;或者车辆相对于第一边界物体和第二边界物体都位于正确航向。第二提示可以由定位辅助系统在以下项中的至少一个时启动:车辆不位于等于或大于距第一边界物体的期望距离的距离处;或者车辆相对于第一边界物体不位于正确航向。第三提示可以由定位辅助系统在以下项中的至少一个时启动:车辆不位于等于或大于距第二边界物体的期望距离的距离处;或者车辆相对于第二边界物体不位于正确航向。第一、第二和第三提示可以彼此区分开来。
10.边界物体可以包括墙壁或存储结构。
11.根据第二方面,提供了一种用于操作物料搬运车辆的方法。确定以下项中的至少一个:从车辆到至少一个边界物体的距离;或者车辆相对于所述至少一个边界物体的航向。经由车辆上的定位辅助系统向驾驶车辆的操作者提供辅助。辅助包括定位辅助系统提供听觉、触觉或视觉提示中的至少一个以指示以下项中的至少一个:车辆位于等于或大于距所述至少一个边界物体的期望距离的距离处;车辆相对于所述至少一个边界物体位于正确航向;车辆不位于等于或大于距所述至少一个边界物体的期望距离的距离处;或者车辆相对于所述至少一个边界物体不位于正确航向。
12.由定位辅助系统提供的辅助可以包括提供以下项中的至少一个:如果从车辆到所述至少一个边界物体的距离小于期望距离,那么提供听觉、触觉或视觉第一提示;或者如果车辆相对于所述至少一个边界物体不位于正确航向,那么提供听觉、触觉或视觉第二提示。由定位辅助系统提供的辅助还可以包括提供可与第一和第二提示区分开的听觉、触觉或视觉第三提示,以指示车辆是以下项中的至少一个:位于等于或大于距所述至少一个边界物体的期望距离的距离处;或者相对于所述至少一个边界物体以正确航向定向。
13.所述至少一个边界物体可以包括位于车辆左侧的第一边界物体和位于车辆右侧的第二边界物体。可以提供听觉、触觉或视觉提示中的至少一个以指示以下项中的至少一个:从车辆到第一边界物体的距离小于期望距离;或者从车辆到第二边界物体的距离小于期望距离。仅当车辆位于等于或大于距第一和第二边界物体的期望距离的距离处,并且车辆相对于第一和第二边界物体以正确航向定向时,车辆才可以被允许由操作者使用无线远程控制设备进行远程控制。
14.所述至少一个边界物体可以包括位于车辆左侧的第一边界物体和位于车辆右侧的第二边界物体。听觉、触觉或视觉提示中的至少一个可以包括视觉提示并且可以由定位辅助系统在以下项中的至少一个上启动:显示设备;或者车辆前方和其右侧的地板表面。可以提供视觉提示以指示车辆必须向右转向以位于以下项中的至少一个:等于或大于距第一边界物体的期望距离的距离处;或者相对于第一边界物体的正确航向。附加地或可替代地,听觉、触觉或视觉提示中的至少一个可以包括视觉提示并且可以由定位辅助系统在以下项中的至少一个上启动:显示设备;或者车辆前方和其左侧的地板表面。可以提供视觉提示以
指示车辆必须向左转向以位于以下项中的至少一个:等于或大于距第二边界物体的期望距离的距离处;或者相对于第二边界物体的正确航向。
15.根据第三方面,提供了一种用于操作由操作者驾驶的物料搬运车辆的方法。识别车辆相对于至少一个边界物体的位置信息。如果确定车辆位于小于距所述至少一个边界物体的期望距离的距离处,那么由车辆上的定位辅助系统发出听觉、触觉或视觉第一提示中的至少一个。一旦确定车辆不位于小于距所述至少一个边界物体的期望距离的距离处,就关闭第一提示。附加地或可替代地,如果确定车辆相对于所述至少一个边界物体不位于正确航向,那么定位辅助系统使用听觉、触觉或视觉第二提示中的至少一个。一旦确定车辆相对于所述至少一个边界物体位于正确航向,就关闭第二提示。
16.所述至少一个边界物体可以包括位于车辆左侧的第一边界物体和位于车辆右侧的第二边界物体。如果确定车辆位于等于或大于距第一和第二边界物体的期望距离的距离处,并且车辆相对于第一和第二边界物体以正确航向定向,那么定位辅助系统可以发出可与第一和第二提示区分开的听觉、触觉或视觉第三提示。第三提示可以向操作者指示车辆被允许由操作者使用无线远程控制设备进行远程控制。仅当车辆被确定位于等于或大于距第一和第二边界物体的期望距离的距离,并且车辆被确定为相对于第一和第二边界物体以正确航向定向时,车辆才可以被允许由操作者使用无线远程控制设备进行远程控制。
17.可以基于位置信息修改至少一个车辆参数。所述至少一个车辆参数可以包括以下项中的至少一个:车辆的最大可允许行驶速度;车辆的最大可允许转弯角度;一个或多个车灯;车辆的负载搬运组件的提升功能;用于指示车辆位于特定区域的标记;或者指示车辆的存在的警报。
18.所述至少一个边界物体可以包括位于车辆左侧的第一边界物体和位于车辆右侧的第二边界物体。第一提示可以包括视觉提示并且可以由定位辅助系统在以下项中的至少一个上启动:显示设备;或者车辆前方和右侧的地板表面。可以提供第一提示以指示车辆必须向右转向以位于等于或大于距第一边界物体的期望距离的距离处。附加地或可替代地,第一提示可以包括视觉提示并且可以由定位辅助系统在以下项中的至少一个上启动:显示设备;或者车辆前方和车辆左侧的地板表面。可以提供第一提示以指示车辆必须向左转向以位于等于或大于距第二边界物体的期望距离的距离处。
附图说明
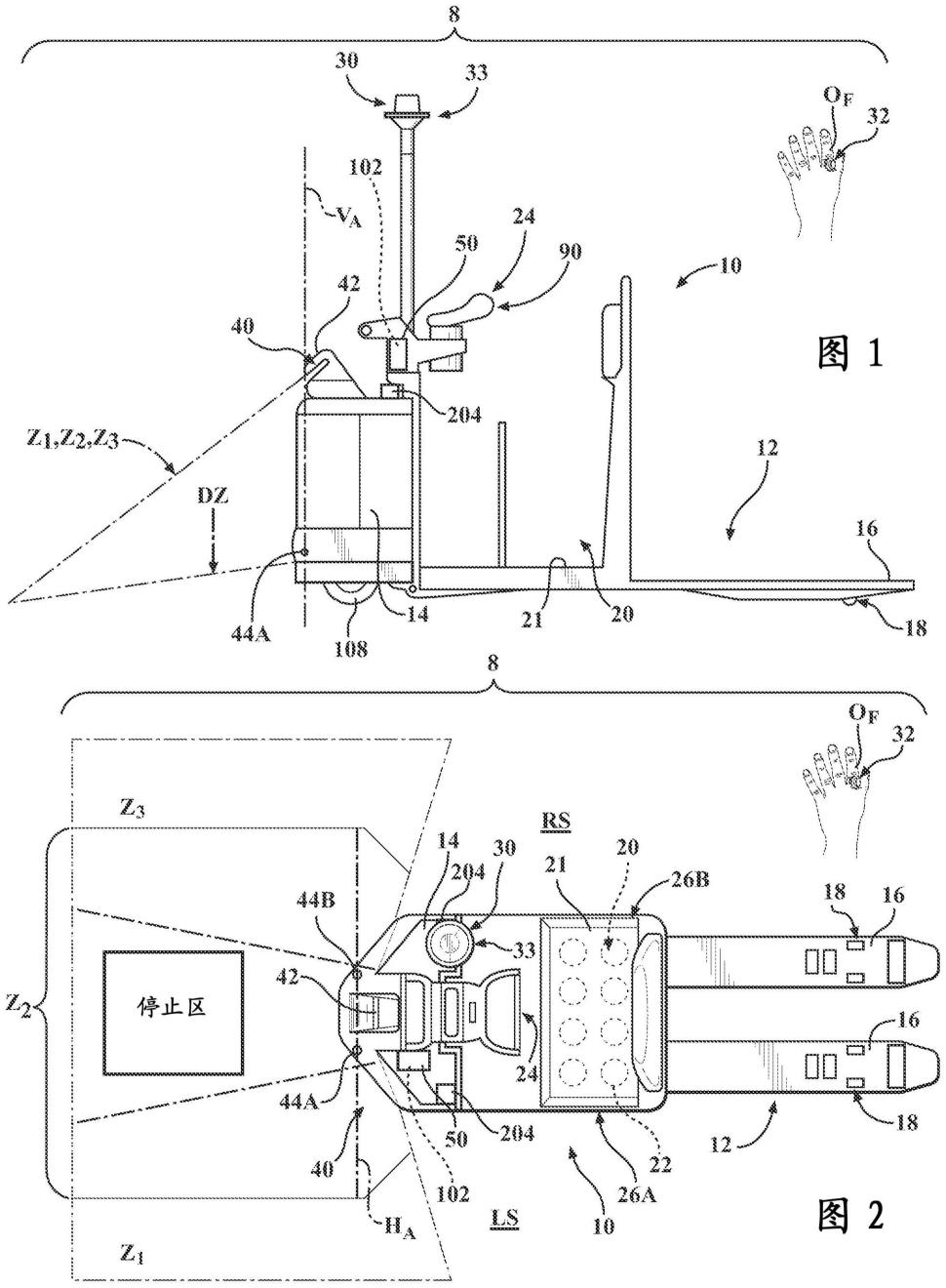
19.图1和图2分别是根据本文所示和描述的一个或多个实施例的物料搬运车辆的侧视图和俯视图;
20.图2a是根据本文所示和描述的一个或多个实施例的另一个物料搬运车辆的侧视图;
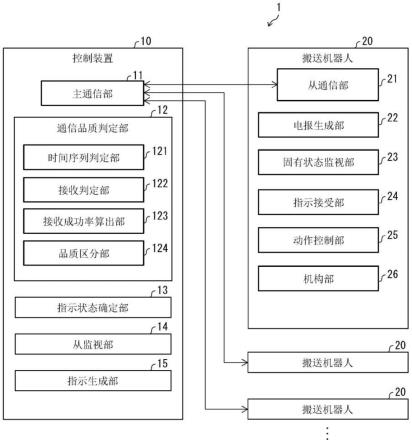
21.图3是根据本文所示和描述的一个或多个实施例的能够进行远程无线操作的物料搬运车辆的几个组件的示意图;
22.图4是根据本文所示和描述的一个或多个实施例的物料搬运车辆的示意图;
23.图4a是根据本文所示和描述的一个或多个实施例的用于将物料搬运车辆周围的区域指定为受限操作或非受限操作区域的示例方法的流程图;
24.图4b是根据本文所示和描述的一个或多个实施例的用于检测操作者已经离开物
料搬运车辆的示例方法的流程图;
25.图4c是根据本文所示和描述的一个或多个实施例的另一个物料搬运车辆的透视图;
26.图4d是生成第二和第三标记的物料搬运车辆的示意图;
27.图4e是物料搬运车辆的示意图,图示了根据本文所述的一个或多个实施例的车辆的操作;
28.图4f是根据本文所述的另一个实施例的物料搬运车辆的侧视图;
29.图5是根据本文所示和描述的一个或多个实施例的物料搬运车辆的示意图;
30.图5a是根据本文所示和描述的一个或多个实施例的用于确定物料搬运车辆的位置信息的示例方法的流程图;
31.图6a-6e是根据本文所示和描述的一个或多个实施例的由操作者逐渐将物料搬运车辆驾驶到过道中的示意图;
32.图6f和6g描绘了根据本文所示和描述的一个或多个实施例的用于帮助操作者将物料搬运车辆正确定位在过道中的示例方法的流程图;
33.图7是根据本文所示和描述的一个或多个实施例的另一个物料搬运车辆的侧视图;
34.图8是根据本文所示和描述的一个或多个实施例的推车的透视图;以及
35.图9是根据本文所示和描述的一个或多个实施例的检测系统的示意图。
具体实施方式
36.以下文本阐述了本公开的许多不同实施例的广泛描述。该描述仅被解释为示例性的并且不描述每个可能的实施例,因为描述每个可能的实施例即使不是不可能的也是不切实际的,并且应该理解的是,本文描述的任何特征、特性、部件、组成、成分、产品、步骤或方法可以全部或部分地被删除、组合或替代本文所述的任何其它特征、特性、部件、组成、成分、产品、步骤或方法。应该理解的是,所描述和示出的实施例的多种组合是可以预期的,并且对一个实施例的特别关注并不排除其包含在其它描述的实施例的组合中。还可以使用当前技术或在本专利申请日之后开发的技术来实现许多替代实施例,这仍将落入权利要求的范围内。本文引用的所有出版物和专利均通过引用并入本文。
37.低位拣货卡车
38.现在参考附图,尤其是图1和2,被图示为低位拣货卡车(low level order picking truck)的物料搬运车辆10包括耦合到动力单元14并从动力单元14延伸的负载搬运组件12。车辆10形成系统8的一部分,系统8将在下面更全面地描述。负载搬运组件12包括一对叉子16,每个叉子16具有负载支撑轮组件18。除了叉子16的图示布置之外或代替叉子16的图示布置,负载搬运组件12可以包括其它负载搬运特征,诸如负载靠背、剪刀式升降叉、外伸支架或单独的高度可调叉,仅举几个示例。更进一步,负载搬运组件12可以包括负载搬运特征,诸如桅杆、负载平台、收集笼或由叉子16承载或以其它方式提供用于搬运由车辆10支撑和承载的负载的其它支撑结构。虽然本公开是参考图示的车辆10做出的,但对于本领域技术人员来说显而易见的是,车辆10可以包括多种其它工业车辆,诸如翻斗式卡车、前移式卡车等,并且除非另有说明,否则参考各图的以下描述不应当限于拣货卡车。此外,
车辆10可以以其它形式、样式和特征实现,包括包含吊钩、夹具、拖车形式的负载搬运组件的车辆10,诸如拖拉器等。
39.所示的动力单元14包括步进式操作者站20,其将动力单元14的第一端部区段(与叉子16相对)与第二端部区段(靠近叉子16)分开。操作者站20包括平台21,操作者可以站在平台21上以驾驶车辆10和/或提供操作者可以操作车辆10的各种包括的特征的位置。操作者使用操作者站20中提供的操作者控制器24手动控制车辆10的行驶功能。
40.动力单元14还包括至少一个转向轮108。卡车10包括用于实现转向轮108的角移动的线控转向系统。线控转向系统80包括形成操作者控件24的一部分的控制手柄90、转向马达114和转向轮108,参见图1和图3。术语“控制手柄”旨在涵盖图1和图2中所示的控制手柄90以及包括转向舵柄和转向轮的类似控制手柄。控制手柄90可以能够由操作者从中心位置旋转大约 /-60度,其中中心位置对应于转向轮108位于直线前进位置。图3中所示的控制手柄位置传感器100a感测控制手柄90的角位置并且可以包括电位计。在所示实施例中,操作者可以在大约 /-60度的角度范围内旋转控制手柄90以控制转向轮108的移动,在图示的实施例中该转向轮108可以能够从中心位置旋转大约 /-90度。当操作者旋转控制手柄90时,控制手柄位置传感器100a感测该旋转,即幅度和方向,并生成与转向轮108的期望角位置对应的转向控制信号给控制器103,参见图3,其可以通信地耦合到转向控制器112。控制器103生成对应的转向启动信号给与转向马达114耦合的转向控制器112,以使转向马达114将转向轮108移动到期望的角位置。控制手柄90和控制手柄位置传感器100a限定了转向设备。
41.可以提供存在传感器22(参见图2)以检测操作者在车辆10上的存在。例如,存在传感器22可以位于平台21上、之上或之下,或者以其它方式提供在操作者站20周围。在图2的示例性车辆10中,存在传感器22以短划线示出,指示它们位于平台21下方。在这种布置下,存在传感器22可以包括负载传感器、开关等。作为替代,存在传感器22可以诸如通过使用超声、电容或其它合适的感测技术来在平台21上方实现。本文将更详细地描述存在传感器22的利用。
42.图1和图2中所示的车辆10包括第一和第二出口26a、26b,操作者可以从这些出口离开操作者站20。第一出口26a位于车辆10的左侧ls,并且第二出口26b位于车辆10的右侧rs,如图2中所示。
43.根据图2中所示的一个实施例,车辆10可以包括杆,该杆从动力单元14垂直延伸并且包括天线30,提供天线30是为了从对应的无线远程控制设备32接收控制信号。杆可以包括顶部的灯33,如图1和2中所示。根据图2a中所示的另一个实施例,天线可以位于其它车辆部件内,使得来自远程控制设备32的控制信号在车辆10的其它地方被接收,如下文将讨论的。
44.远程控制设备32可由操作者手动操作,例如,通过按下按钮或其它控制装置,以使远程控制设备32至少向与远程控制设备32配对的车辆10传输指定行驶请求的第一类型信号。行驶请求是请求车辆10行驶的命令,如将在本文中更详细地描述的。虽然远程控制设备32在图1和2中被示为手指安装结构,但是可以实现远程控制设备32的多种实施方式,包括例如手套结构、挂绳或腰带安装结构等。下面将详细讨论与远程控制设备32相关的附加细节。
45.车辆10还包括一个或多个非接触式障碍物传感器40,其在车辆10周围提供,例如
朝着动力单元14的第一端部区段,如图1和2中所示。障碍物传感器40可操作以定义至少一个检测区。例如,当车辆10响应于来自远程控制设备32的无线接收的行驶请求而行驶时,至少一个检测区可以定义至少部分地在车辆10的向前行驶方向前方的区域,如也在本文更详细地描述的。
46.障碍物传感器40可以包括任何合适的接近度检测技术,诸如超声传感器、图像捕获设备、红外传感器、激光扫描仪传感器等,其能够检测物体/障碍物的存在或能够生成可以被分析以检测预定义的(一个或多个)检测区内物体/障碍物的存在的信号。在图1和2中所示的示例性实施例中,车辆10包括安装到动力单元14的第一障碍物检测器42以及一对第二障碍物检测器44a和44b。第一障碍物检测器42沿着定义垂直方向的车辆10的垂直轴va与第二障碍物检测器44a和44b间隔开,即,第二障碍物检测器44a和44b位于第一障碍物检测器42下方(比第一障碍物检测器42更靠近地面),参见图1。第二障碍物检测器44a和44b沿着定义水平方向的车辆10的水平轴ha彼此间隔开,参见图2。
47.第一障碍物检测器42可以包括能够检测例如在第一、第二和第三区z1、z2、z3(在本文中也称为扫描区或检测区)中的物体的扫掠或扫描激光传感器,第一、第二和第三区z1、z2、z3可以包括平面区,参见图1和图2。第二区z2可以包括“停止区”,其中如果车辆10在远程控制设备32的控制下行驶并且在停止区中检测到物体,那么车辆10停止,并且第一和第三区z1和z3可以包括左和右“转向保险杠区”,其中车辆10可以被转向以便在其在远程控制设备32的控制下行驶并且在转向保险杠区中检测到物体时试图避免与物体接触。注意的是,第一障碍物检测器42可以能够检测比图示的三个区z1、z2、z3更多或更少的区中的物体。
48.第二障碍物检测器44a和44b可以包括点激光传感器,其能够检测第一障碍物检测器42的区z1、z2、z3中的一个或多个与车辆10之间(即,在区z1、z2、z3中的一个或多个下方,如图1中所示)和/或经过区z1、z2、z3的物体,并且优选地能够至少检测第二区z2下方的物体。因此,第二障碍物检测器44a和44b能够检测位于第一障碍物检测器42的非检测区dz中的物体,参见图1,即,该非检测区dz被定义为区z1、z2、z3下方的区域并且因此不被第一障碍物检测器42感测到。因此,第一障碍物检测器42用于检测沿着动力单元14的行驶路径位于非检测区dz之外的物体,而第二障碍物检测器44a和44b用于感测沿着位于车辆10的正前方的非检测区dz中的动力单元14的行驶路径的物体,如图1中所示。
49.可以使用附加的传感器配置和/或检测区。
50.控制系统
51.参考图3,框图图示了用于将远程控制命令与车辆10集成的控制布置。可以是例如蓝牙低功耗(ble)无线电收发装置的接收器102被提供用于接收由远程控制设备32发出的命令。接收器102将接收到的控制信号传递给控制器103,控制器103对接收到的命令实现适当的响应,因此在本文中也可以被称为主控制器。在这点上,控制器103以硬件实现并且还可以执行软件(包括固件、常驻软件、微代码等)。此外,实施例可以采用在一个或多个计算机可读介质中实施的计算机程序产品的形式,该计算机可读介质具有在其上实施的计算机可读程序代码。例如,车辆10可以包括存储计算机程序产品的存储器,当其由控制器103的处理器实现时,实现如本文更充分描述的转向校正。
52.因此,控制器103可以至少部分地定义适于存储和/或执行程序代码的数据处理系统并且可以包括例如通过系统总线或其它合适的连接直接或间接耦合到存储器元件的至
少一个处理器。存储器元件可以包括在程序代码的实际执行期间采用的本地存储器、集成到微控制器或专用集成电路(asic)中的存储器、可编程门阵列或其它可重新配置的处理设备等。
53.由控制器103响应于无线(例如,经由远程控制设备32(将在下面讨论)的无线发送器178)接收的命令而实现并发送到车辆10上的接收器102的响应可以包括一个或多个动作或不动作,这取决于正在实现的逻辑。积极动作可以包括控制、调整或以其它方式影响车辆10的一个或多个部件。控制器103还可以从其它输入104(例如,从诸如存在传感器22、障碍物传感器40、开关、负载传感器、编码器和车辆10可用的其它设备/特征之类的源)接收信息,以响应于从远程控制设备32接收的命令而确定适当的动作。传感器22、40等可以经由输入104或经由合适的卡车网络(诸如控制区域网络(can)总线110)连接到控制器103。
54.在示例性布置中,远程控制设备32可操作以向车辆10上的接收器102无线传输控制信号,该控制信号表示诸如行驶命令之类的第一类型信号。行驶命令在本文中也被称为“行驶信号”、“行驶请求”或“前进信号”。行驶请求被用于向车辆10发起行驶的请求,例如,只要行驶信号由接收器102接收和/或由远程控制设备32发送预定量,例如,使车辆10在第一方向上前进或慢跑有限的行驶距离或有限的时间。例如,第一方向可以首先通过车辆10在动力单元14中移动来定义,即,叉子16向后的方向。但是,可以可替代地定义其它行驶方向。而且,车辆10可以被控制以在大体笔直的方向上或沿着先前确定的航向行驶。相应地,受限的行驶距离可以通过近似行驶距离、行驶时间或其它测量来指定。
55.因此,由接收器102接收的第一类型信号被传送到控制器103。如果控制器103确定行驶信号是有效行驶信号并且当前车辆状况合适,那么控制器103向车辆10的适当控制配置发送前进然后停止车辆10的信号。停止车辆10可以例如通过或者允许车辆10滑行至停止或通过发起制动操作以使车辆10制动至停止来实现。
56.作为示例,控制器103可以可通信地耦合到牵引控制系统,示为车辆10的牵引马达控制器106。牵引马达控制器106耦合到驱动车辆10的至少一个转向轮108的牵引马达107。控制器103可以响应于从远程控制设备32接收到行驶请求而与牵引马达控制器106通信以加速、减速、调整和/或以其它方式限制车辆10的速度。如上所述,控制器103还可以可通信地耦合到转向控制器112,该转向控制器112耦合到转向马达114,该转向马达使车辆10的至少一个转向轮108转向。在这点上,响应于从远程控制设备32接收到行驶请求,车辆10可以由控制器103控制以行驶预期路径或维持预期航向。
57.作为又一个说明性示例,控制器103可以可通信地耦合到制动控制器116,该制动控制器116控制车辆制动器117以响应于接收到来自远程控制设备32的行驶请求而减速、停止或以其它方式控制车辆10的速度。更进一步,在适用的情况下,控制器103可以可通信地耦合到其它车辆特征(诸如主接触器118和/或与车辆10相关联的其它输出119),以响应于实现远程行驶功能而实现期望的动作。
58.根据各种实施例,控制器103可以与接收器102并与牵引马达控制器106通信以响应于从相关联的远程控制设备32接收行驶命令而在远程控制下操作车辆10。而且,如果车辆10响应于行驶请求而在远程控制下行驶并且在检测区z1、z2、z3中的一个或多个中检测到障碍物,那么控制器103可以被配置为执行各种动作。在这点上,当由控制器103从远程控制设备32接收到行驶信号时,控制器103可以考虑任何数量的因素来确定是否应当对接收到
的行驶信号采取行动以发起和/或维持车辆10的移动。
59.相应地,如果车辆10响应于由远程控制设备32接收到的命令而移动,那么控制器103可以动态地更改、控制、调整或以其它方式影响远程控制操作,例如通过停止车辆10、改变车辆10的转向角或采取其它动作。因此,特定车辆特征、一个或多个车辆特征的状态/状况、车辆环境等可以影响控制器103响应来自远程控制设备32的行驶请求的方式。
60.控制器103可以根据例如与环境或(一个或多个)操作因素相关的(一个或多个)预定条件拒绝确认接收到的行驶请求。例如,控制器103可以基于从传感器22、40中的一个或多个获得的信息而忽略另外有效的行驶请求。作为说明,根据各种实施例,当确定是否响应来自远程控制设备32的行驶命令时,控制器103可以可选地考虑诸如操作者是否在车辆10上之类的因素。如上所述,车辆10可以包括至少一个存在传感器22,用于检测操作者是否位于车辆10上。在这点上,控制器103还可以被配置为当(一个或多个)存在传感器22指定没有操作者在车辆10上时响应行驶请求以在远程控制下操作车辆10。因此,在这个实施方式中,除非操作者物理地离开车辆10,否则不能响应于来自远程控制设备32的无线命令而操作车辆10。类似地,如果障碍物传感器40检测到包括操作者在内的物体靠近和/或接近车辆10,那么控制器103可以拒绝确认来自远程控制设备32的行驶请求。因此,在示例性实施方式中,操作者必须位于车辆10的受限范围内,例如,足够靠近车辆10以处于无线通信范围内(这可以被限制为设置操作者距车辆10的最大距离)。可以可替代地实现其它布置。
61.任何其它数量的合理条件、因素、参数或其它考虑也可以/可替代地由控制器103实现以响应于从发送器178接收的信号而解释和采取动作。
62.在确认行驶请求后,控制器103例如直接或间接地(例如,经由诸如can总线110之类的总线,如果使用的话)与牵引马达控制器106交互,以推进车辆10。取决于特定的实施方式,控制器103可以与牵引马达控制器106以及可选地与转向控制器112交互,以便只要接收到行驶控制信号就推进车辆10。可替代地,控制器103可以与牵引马达控制器106以及可选地与转向控制器112交互,以响应于远程控制设备32上行驶控制的检测和维持的启动而使车辆10前进一段时间或预定距离。更进一步,控制器103可以被配置为基于预定事件(诸如超过预定时间段或行驶距离)而“超时”并停止车辆10的行驶,而不管是否检测到远程控制设备32上对应控件的维持启动。
63.远程控制设备32还可以可操作以传输第二类型信号(诸如“停止信号”,指示车辆10应当制动和/或以其它方式静止下来)。第二类型信号也可以是隐含的,例如,在实现“行驶”命令之后,例如,在车辆10已经行驶预定距离、行驶预定时间等之后,在响应于行驶命令的远程控制下。如果控制器103确定无线接收的信号是停止信号,那么控制器103向牵引马达控制器106、制动控制器116和/或其它卡车部件发送使车辆10静止下来的信号。作为停止信号的替代,第二类型信号可以包括指定车辆10应当滑行,最终减速到静止的“滑行信号”或“受控的减速信号”。
64.使车辆10完全静止所需的时间可以变化,这取决于例如预期应用、环境条件、特定车辆10的能力、车辆10上的负载和其它类似的因素。例如,在完成适当的慢跑移动之后,可能期望允许车辆10在静止下来之前“滑行”一些距离,使得车辆10缓慢停止。这可以通过利用再生制动使车辆10减速以停止来实现。可替代地,可以在预定延迟时间之后施加制动操作以允许在停止操作发起之后车辆10附加行驶预定范围。例如,如果在车辆10的行驶路径
中检测到物体或者如果在成功的慢跑操作之后期望立即停止,那么还可能期望使车辆10相对更快地停止。例如,控制器103可以向制动操作施加预定扭矩。在这种情况下,控制器103可以指示制动控制器116施加制动器117以使车辆10停止。
65.配对系统34可以利用例如近距离系统与无线远程控制设备32上的兼容的近距离系统进行无线通信。使用配对系统34,车辆10和无线远程控制设备32可以“配对”,使得车辆10将仅从其配对的无线远程控制设备32传输和接收消息。配对系统34包括物理地实现用于发送消息的通信方法(例如,蓝牙、nfc、ble、wi-fi等)的部件,并且包括以商定的协议以编程方式交换信息以建立和维护配对的部件。因此,配对系统34包括可以执行可编程指令以实现预定算法和协议以完成配对操作的设备。
66.现在参考图1、2和4,图4示意性地图示了车辆10的稍微不同的实施例,其通常可以包括与图1、2和2a的车辆10相同的部件。根据实施例的系统8还包括光源设备200,用于将车辆10的左侧ls或右侧rs(参见图2和图4)的区域指定为受限操作区域和/或车辆10的左侧ls或右侧rs的区域指定为非受限操作区域。如本文所使用的,短语“受限操作区域”可以对应于其中车辆10的左侧或右侧ls、rs与车辆10所在的相邻边界物体202(诸如墙壁、支柱或诸如货架、搁板、托盘等存储结构)之间的距离d1或d2小于预定距离的区域,并且短语“非受限操作区域”可以对应于其中距离d1或d2大于或等于预定距离的区域。距离d1可以被称为第一距离,距离d2可以被称为第二距离,车辆左侧ls的区域可以被称为第一区域,并且车辆右侧rs的区域可以被称为第二区域。“预定距离”可以被设置为这样的值,使得当距离d1或d2小于预定距离时,与该距离d1或d2对应的区域可能是不足以容纳操作者或人,同时还维持操作者或人与边界物体202之间的最小间隙距离(该间隙距离可以由车主或车辆制造商定义)的区域,并且当距离d1或d2大于或等于预定距离时,与该距离d1或d2对应的区域可以是足以容纳操作者或人并维持操作者或人与边界物体202之间的最小间隙距离的区域。距离d1和d2是在车辆10和物体202之间,例如,在车辆10的动力单元14和物体202之间,或者在负载搬运组件12和物体202之间,在垂直于车辆10的纵向轴线la的横向方向ld上测量的,如图4中所示。如上所述,控制器103可以从障碍物传感器40接收信息。控制器103还可以耦合到光源设备200以控制设备200的操作。距离d1和d2可以由控制器103例如使用从与控制器103耦合的一个或多个感测设备(诸如包括第一障碍物检测器42的(一个或多个)障碍物传感器40或其它合适的传感器)获得的传感器信息或数据,或者通过使用与物体202的已知位置数据相关的车辆10的位置数据来确定。如上所述,第一障碍物检测器42可以包括扫描激光传感器,该扫描传感器可以感测或测量x和y方向上的距离,并且因此可以测量车辆10和(一个或多个)物体202之间的距离d1和d2。
67.光源设备200可以包括光控制器1202和耦合到光控制器1202的一个或多个光源204,其中一个或多个光源204可以位于车辆10上并且可以包括可见激光、光条、投影仪等,其中光源204可以在左侧ls和/或右侧rs与车辆10相邻的地板上投射可见标记,并且还可选地在车辆10的前面和/或后面投射可见标记。关于光源204的示例性地点,参见图4c。光控制器1202可以耦合到控制器103,控制器103经由光控制器1202控制一个或多个光源204的操作。可以预期,除了图4c中所示的光源地点之外,在一些实施例中,光源204可以结合到车辆10结构中,使得它们与车辆10的车身线条齐平。在一些实施例中,光源204可以耦合到动力单元14、叉子16、裙边等并且定位成使得它们不会在物体接触光源204时被撞得不对准。当
车辆10与物体202之间的距离d1或d2小于预定距离时,控制器103经由光控制器1202激活或控制一个或多个光源204,使得一个或多个光源204以操作者或车辆附近的人可以观察到的方式,例如,通过用可见标记照亮与车辆10相邻的与受限操作区域对应的地板的至少一部分,将车辆10与物体202之间的区域指定为受限操作区域。当车辆10与物体202之间的距离d1或d2大于或等于预定距离时,控制器103经由光控制器1202控制一个或多个光源204,使得它们不将车辆10和物体202之间的区域指定为受限操作区域,其中控制器103可以经由光控制器1202激活或控制一个或多个光源204,使得它们可选地以操作者或车辆10附近的人可以观察到的方式,例如,通过用与用于指定受限操作区域的标记可区分的可见标记照亮与车辆10相邻的与非受限操作区域对应的地板的至少一部分,将车辆10与物体202之间的区域指定为非受限操作区域。
68.当距离d1和d2两者同时大于或等于预定距离时,控制器103可以激活一个或多个光源204,使得它们同时将车辆10的相对侧上的第一和第二区域指定为非受限操作区域。此外,当距离d1和d2两者同时小于预定距离时,控制器103可以激活一个或多个光源204,使得它们同时将车辆10的相对侧上的第一和第二区域指定为受限操作领域。此外,当距离d1或d2中的一个大于或等于预定距离,并且距离d1或d2中的另一个同时小于预定距离时,控制器103可以经由光控制器1202激活一个或多个光源204使得一个或多个光源204同时将第一和第二区域中的一个指定为受限操作区域并且将第一和第二区域中的另一个指定为非受限操作区域。
69.根据实施例,一个或多个光源204可以使用第一标记206(参见图4),诸如可以具有第一光颜色的第一光图案来指定受限操作区域,并且使用可与第一标记206区分的第二标记208(参见图4),诸如可以具有与第一光颜色不同的第二光颜色的第二光图案来指定非受限操作区域。作为另一个可选特征,一个或多个光源204可以使用与第一标记206和第二标记208可区分的第三标记209,诸如可以具有第三光颜色的第三光图案来指定车辆10正在接近受限操作区域。当车辆10与物体202之间的距离大于或等于预定距离,即第一预定距离da,但小于第二预定距离db时,控制器103可以使第三标记209被一个或多个光源204照亮,参见图4d。因此,当车辆10与物体202之间的距离大于第一预定距离但小于第二预定距离时,第二和第三标记可以被同时照亮。可以提供耦合到光控制器1202的单独光源205用于生成第三标记209。
70.一个或多个光源204和单独的光源205可以位于车辆10上的任何地方,诸如在动力单元14上,并且优选地位于它们可以照亮在负载搬运组件12和物体202之间以及在动力单元/操作站14/20和物体202之间的地板的至少一部分的地方。
71.在实施例中,如果确定车辆10在过道210中,那么控制器103将仅启动一个或多个光源204和单独的光源205以照亮适用的标记。在这样的实施例中,当车辆10处于除过道210以外的地点时,光源204和单独的光源205将不被激活。可以例如由控制器103使用来自(一个或多个)障碍物传感器40的传感器数据、由与车辆10通信的仓库管理系统(wms)和/或使用车辆10的位置数据等确定车辆10在过道210中。
72.该实施例向操作者或车辆10附近的其它人提供了关于他们可能不想走到那里(受限操作区域)的建议,以及他们可能想要走到那里(非受限操作区域)的建议。当设备200位于车辆10上时,设备200随着车辆10移动,其优点在于当车辆10不在附近时将不会有受限操
作区域。换句话说,区域仅当车辆10存在并且位于靠近物体202(例如,墙壁或货架)时才可能成为受限操作区域。
73.现在参考图4a,示出了示例性方法230,以说明将车辆10周围的区域指定为受限操作区域或非受限操作区域。在步骤232处,车辆10位于过道210内并且从车辆10到与车辆10的左侧ls相邻的第一货架的距离d1小于预定距离,即第一预定距离,并且同时从车辆10到与车辆10的右侧rs相邻的第二货架的距离d2大于或等于预定距离,即第一预定距离。在步骤234处,由控制器103启动的设备200用第一标记206照亮车辆10的左侧ls和第一货架之间的地板的至少一部分,以将该区域指定为受限操作区域。例如,控制器103可以控制设备200,使得设备200生成包括第一光图案和第一光颜色的第一标记206(参见图4)。在可选步骤236(可选步骤由图中的短划线框指示)处,由控制器103启动的设备200用第二标记208同时照亮车辆10的右侧rs和第二货架之间的地板的至少一部分,以将该区域指定为非受限操作区域。例如,控制器103可以控制设备200,使得设备200生成包括第二光图案和第二光颜色的第二标记208(参见图4)。在步骤238处,一旦从车辆10到第一货架的距离d1大于或等于预定距离,设备200就响应于由控制器103控制,移除第一标记206,并且可以可选地用第二标记208照亮车辆10的左侧ls和第一货架之间的地板的至少一部分,以将该区域指定为非受限操作区域。作为另一个可选步骤240,随着车辆10接近从车辆10到第一或第二货架的距离d1或d2将很快小于第一预定距离da并且当前仅小于第二预定距离db的位置,设备200用第三标记209照亮车辆10的对应左侧ls或右侧rs与相应第一或第二货架之间的地板的至少一部分,以指示车辆10正在接近其中车辆10和货架之间的区域将成为受限操作区域的位置。
74.再次参考图4,系统8还可以包括感测系统250,其检测操作者何时离开车辆10的操作者站20。感测系统250还能够区分操作者是从第一出口26a还是从第二出口26b离开车辆。感测系统250可以包括例如第一和第二光电传感器,诸如光幕传感器252a、252b,一个位于第一出口26a,另一个位于第二出口26b。光幕传感器252a、252b能够检测通过各个出口26a、26b的操作者,从而区分操作者从哪个出口26a、26b离开车辆10。感测系统250还可以包括操作者存在传感器22(参见图2),其中来自操作者存在传感器22的数据可以附加地用于确定操作者已经离开车辆10,并且与来自光幕传感器252a、252b的数据组合使用,以确定操作者通过哪个出口26a、26b离开车辆10。
75.根据实施例,如果车辆10定位在距位于车辆10的与操作者离开车辆10的一侧相邻的物体202(例如墙壁或货架)的预定义距离内,如感测系统250所确定的,那么车辆10的至少一个功能可以由控制器103修改,例如,被禁用、限制或激活。预定义距离是在车辆10和物体202之间的横向方向ld上测量的。预定义距离可以与上面讨论的预定距离相同、相似或不同。该实施例可以与(一个或多个)光源204一起使用,使得当走出车辆时,操作者将知道他们正在踏入受限操作区域还是非受限操作区域,即,基于在邻近车辆10的地板上被照亮的第一或第二标记206或208。因此,当车辆定位在距物体202的预定义距离内时,(一个或多个)光源204可以将车辆10的左侧ls或右侧rs的区域指定为受限操作区域,其中预定义距离可以与上面讨论的预定距离相同。
76.由控制器103修改的(一个或多个)车辆功能可以是例如车辆的牵引控制/行驶移动,例如可以限制车辆10的最大可允许速度或者可以禁用车辆10的牵引控制、可以限制或禁用负载搬运组件的功能,例如提升和/或降低、可以禁用经由远程控制设备32对车辆10的
远程控制功能、可以激活车辆提醒系统例如以发起警报等。
77.如上所述,来自操作者存在传感器22的数据可以附加地用于确定操作者已经离开车辆10。在这点上,系统250附加地能够检测例如操作者已经将一只脚移出车辆10但另一只脚仍在车辆10内的情况,即,光幕传感器252a或252b之一检测到通过(例如,操作者的脚/腿通过),但是操作者存在传感器22仍然检测到操作者在平台21上的存在。在这种情况下,车辆的(一个或多个)上述功能可能会或可能不会被控制器103禁用,和/或车辆10可以发出警报或其它警告以使操作者将他们的脚/腿移回到操作者站20中。也可以采取替代措施,诸如例如停止车辆10,直到操作者将他们的脚/腿放回操作者站20中。
78.现在参考图4b,提供了示例性方法270以说明检测到操作者已经离开车辆10。在步骤272处,系统250检测到操作者已经离开车辆10。在可以与步骤272同时执行的步骤274处,系统250检测操作者从哪个出口26a、26b离开。在步骤276处,假设在该示例中操作者离开车辆10到车辆10的边界物体位于距车辆10的预定义距离内的一侧,那么车辆10的至少一个功能被控制器103修改,例如被限制、禁用或激活。当操作者执行一个或多个动作,诸如例如,移回到车辆10上、移出边界物体与车辆10之间的区域、启动手动输入,诸如位于车辆10或触摸屏ts(参见图4c)上的按钮/开关等,或通过关闭然后重启车辆10时,控制器103可以使车辆10的至少一个功能返回到其先前状态。
79.该实施例还可以与仅包括单个出口的车辆一起使用。即,如果单出口车辆定位在距位于与车辆的具有出口的一侧相邻的边界物体(例如,墙壁或货架)的预定义距离内,那么车辆10的至少一个功能可以如本文所述被禁用。
80.该实施例还可以与包括两个出口的车辆一起使用,但是其中只有一个出口将包括光幕传感器。例如,当在过道中驾驶,其中车辆将始终位于距过道的一侧比另一侧更近,例如,其中车辆始终沿着过道的左侧或右侧驾驶的情况时,可以使用这种配置。在这种情况下,只有过道的与车辆沿着其驾驶的一侧对应的出口可以包括光幕传感器。
81.现在转向图5,根据实施例,系统8还包括至少一个感测设备300,其可以是本文讨论的(一个或多个)障碍物传感器40和/或(一个或多个)其它感测设备。感测设备300监视车辆10的左右两侧ls、rs的前方和旁边的区域。具体而言,感测设备300监视与车辆10的左侧ls相邻的第一区域a1、车辆10前方的第二区域a2以及与车辆10的右侧rs相邻的第三区域a3。图5中的区域a1、a2和a3以示例性地点示出。控制器103使用来自感测设备300的数据来识别车辆10相对于车辆10所在附近的一个或多个边界物体202的位置信息。参考图5中所示的实施例,车辆10相对于与车辆10左侧ls相邻的第一货架202a的位置由控制器103确定,并且车辆10相对于与车辆10右侧rs相邻的第二货架202b的位置由控制器103确定。位置信息可以包括从车辆10到第一货架202a和/或到第二货架202b的横向距离。
82.控制器103可以使用位置信息来确定车辆10是否位于过道210中。例如,如果车辆10与第一货架202a之间的距离d1加上车辆10与第二货架202b之间的距离d2加上车辆10的宽度等于过道210的已知宽度或在其预定义范围内,那么可以确定车辆10位于过道210中(如果距离d1和d2是从车辆10的纵向轴线la到各个货架202a、202b测量的,而不是从车辆10的左侧和右侧ls、rs测量的,那么车辆10的宽度将不在该方程中考虑)。
83.控制器103还可以使用位置信息来确定车辆10是否位于过道210内的期望位置。例如,如果从车辆10到第一和第二货架202a、202b的距离相等或在预定公差内,那么可以确定
车辆10位于过道210的中心。或者,如果从车辆10到第一货架202a或第二货架202b中的一个的距离等于或在对预定义拥抱距离(将在下面讨论)的预定公差内,并且可选地,如果通过控制器103确定操作者不在车辆10上(例如,经由来自感测系统250的信息),那么可以确定车辆10处于拥抱模式(将在下面描述),或者处于开始拥抱模式的正确位置。
84.控制器103可以使用车辆10相对于(一个或多个)边界物体的位置信息来修改至少一个车辆参数。可以以这种方式被修改的示例性车辆参数包括:最大可允许行驶速度(例如,基于位置信息,最大可允许行驶速度可以从正常最大可允许行驶速度降低到降低的最大可允许行驶速度或从降低的最大可允许行驶速度增加到正常最大可允许行驶速度);最大可允许转向角(例如,基于位置信息,最大可允许转向角可以从正常最大可允许转向角减小到减小的最大可允许转向角或从减小的最大可允许转向角增加到正常最大可允许转向角);转向轮与转向设备的比率(steered-wheel-to-steering-device ratio);一个或多个车灯(例如,基于位置信息,车辆10上的一个或多个灯可以被打开或关闭);负载搬运组件的提升功能(例如,基于位置信息,负载搬运组件12的(一个或多个)提升/降低功能可以被调整,诸如提升/降低速度或最大提升高度,和/或负载搬运组件12可以自动升高或降低到期望高度);用于指示车辆位于特定区域的标记(例如,基于位置信息,第一、第二或第三标记206、208、209可以被打开或关闭);和/或,基于位置信息,可以给出提醒以指示车辆10在过道210中的存在,诸如听觉提醒、视觉提醒、显示屏(例如,触摸屏ts)上的提醒,等等。
85.如上所述,控制器103从控制手柄位置传感器100a接收转向控制信号,在所示实施例中,控制手柄位置传感器100a在大约 /-60度的角度范围内感测控制手柄90的角度位置。由于当前转向控制信号对应于控制手柄90的在大约 /-60度的范围内的当前位置,并且转向轮108能够旋转 /-90度的角度范围,因此控制器103通过将当前控制手柄位置乘以转向轮与转向设备的比率,诸如90/60或1.5/1.0,将如转向控制信号所指示的当前控制手柄位置转换成转向轮108的对应期望角位置,例如, 60度的控制手柄90的角位置等于 90度的转向轮108的期望角位置。例如,如果控制手柄90的角位置为 60度,那么控制器103将 60度乘以1.5/1.0的比率以确定转向轮108的期望角位置等于 90度并生成对应的转向启动信号给转向控制器112。
86.转向轮与转向设备的比率可以等于60/60或1.0/1.0。例如,如果控制手柄90的角位置是 60度,那么控制器103可以将 60度乘以1.0/1.0的比率以确定转向轮108的期望角位置等于 60度。
87.当位置信息指示车辆10位于距物体202(诸如位于与车辆10的一侧邻近的墙壁或货架)的预定义距离内时,控制器103可以修改转向轮108的最大可允许转向角或转向轮与转向设备的比率中的至少一个。控制器103可以修改转向轮108的最大可允许转向角或转向轮与转向设备的比率中的至少一个,而与车辆是由操作者手动控制还是远程控制无关。还预期当例如如由感测系统250确定的,确定操作者不在操作者站20中时,或者当操作者使用与车辆10配对的远程控制设备32远程控制车辆10时,控制器103可以仅修改转向轮108的最大可允许转向角或转向轮与转向设备的比率中的至少一个。
88.如上所述,预定义距离是在车辆10和物体202之间的横向方向ld上测量的。预定义距离可以与上面讨论的预定距离相同、相似或不同(定义为当距离d1或d2小于预定距离时,与该距离d1或d2对应的区域可能是不足以容纳操作者或人,同时还维持操作者或人与边界
物体202之间的最小间隙距离的区域)。例如,当位置信息指示车辆10位于距墙壁或货架的预定义距离内时,控制器103可以将转向轮108的最大可允许转向角从第一最大可允许转向角减小到第二最大可允许转向角,其中第二最大可允许转向角小于第一最大可允许转向角。在图4e中,车辆10被图示为在物体202的预定义距离d
pd
内,使得转向轮108的最大可允许转向角减小到较小的值,从而减小车辆10上的叉子16或由叉子16承载的负载可能会在急转弯期间摆动到墙壁或货架中的可能性。还预期当车辆10在物体202的预定义距离d
pd
内时,转向轮与转向设备的比率可以从较大的比率(1.5/1.0)改变为较小的比率(1.0/1.0)以使转向轮108的转向不太敏感。
89.在又一个示例中,控制器103可以在由感测设备300感测到的位置信息指示车辆10位于距物体202(诸如位于与车辆10的一侧相邻的墙壁或货架)的预定义距离内,并且也由感测设备300感测到的物体信息指示另一个物体在车辆10的前方或侧面,即在感测设备300的感测范围内时,修改转向轮108的最大可允许转向角或转向轮与转向设备的比率中的至少一个。例如,当位置信息指示车辆10定位在距墙壁或货架的预定义距离内,并且物体信息指示另一个物体在车辆的前方或侧面时,控制器103可以将最大可允许转向角从第一最大可允许转向角减小到第二最大可允许转向角,其中第二最大可允许转向角小于第一最大可允许转向角。在图4e中,车辆10被图示为在物体202的预定义距离d
pd
内,此外,物体203,诸如虚线中所示的方框,位于车辆10的前方,使得转向轮108的最大可允许转向角被减小到较小的值,从而降低叉子16或由叉子16承载的负载在急转弯期间可能摆动到墙壁或货架中的可能性。还预期当车辆10在物体202的预定义距离d
pd
内并且另一个物体203被感测为在车辆10的前方或侧面时,转向轮与转向设备的比率可以从较大比率改变为较小比率,以使转向轮108的转向不太敏感。
90.在图4f中,图示了另一个物料搬运车辆200a,其包括具有桅杆组件1230的拣货卡车。桅杆组件1230形成负载搬运组件218的耦合到动力单元14并从动力单元14延伸的一部分。负载搬运组件218还包括叉架组件224,其耦合到桅杆组件1230,用于相对于桅杆组件1230并与桅杆组件1230一起移动。叉架组件224包括叉架226(在本文中也称为“升降架”)和耦合到叉架226的一对叉子216。桅杆组件1230包括一个或多个桅杆区段。图4f中所示的示例性桅杆组件1230是包括第一和第二桅杆区段或焊件1232和1234的两级桅杆组件。叉架226附接到第二桅杆区段或焊件1234并相对于第二桅杆区段或焊件1234移动,并经由安装到第二区段1234的主提升柱塞/气缸组件(未示出)相对于第二桅杆区段1234提升。第二区段或焊件1234相对于第一固定桅杆区段或焊件1232移动,其中第一桅杆区段1232安装到动力单元14。一个或多个液压辅助提升柱塞/气缸组件(未示出)在它们的气缸底部固定到动力单元14或第一桅杆区段1232,并且柱塞固定到第二桅杆区段1234。随着辅助组件的柱塞延伸,柱塞使第二桅杆区段1234连同叉架组件224一起相对于第一桅杆区段1232移动。
91.在又一个示例中,当位置信息指示车辆10位于过道内时,控制器103可以修改负载搬运组件提升高度、转向轮108的最大可允许转向角或转向轮与转向设备的比率中的至少一个。提升架的提升高度可以限定负载搬运组件提升高度。例如,一旦感测设备300感测到并且控制器103确定车辆10位于过道内时,控制器103就可以减小叉架226和叉子216可以升高到的最大提升高度,即,提升架的最大提升高度。在进一步的实施例中,控制器103可以仅当感测设备300感测到并且控制器103确定车辆10位于具有指定的或预定义的过道宽度(在
本文中也称为“第一过道宽度”)或宽度等于或小于预定义的或第一过道宽度的过道内时,才减小叉架226和叉子216可以升高到的最大提升高度。注意的是,一些冰库的天花板低,并且过道也很窄。因此,当控制器103确定车辆200a正在通过具有指定的或第一过道宽度的狭窄过道时,控制器103将把叉架226和叉子216可以提升到的高度限制为较低的最大提升高度以避免接触天花板。在另一个示例中,当位置信息指示车辆10位于过道内时,控制器103可以将转向轮108的最大可允许转向角从第一最大可允许转向角减小到第二最大可允许转向角,其中第二最大可允许转向角小于第一最大可允许转向角。还进一步预期,控制器103可以将转向轮108的最大可允许转向角修改为减小的值,同时感测设备300首先感测车辆10位于过道内并且还可以在一旦感测设备300感测到车辆10不再位于过道内时就将转向轮108的最大可允许转向角修改(即返回)到其较高值。还预期当控制器103确定车辆10位于过道内时,可以将转向轮与转向设备的比率从较大的比率(1.5/1.0)改变为较小的比率(1.0/1.0)以使转向轮108的转向不太敏感。
92.在又一个示例中,当位置信息指示车辆10定位在过道内,并且由感测设备300感测到的物体信息指示另一个物体在车辆10的前方或侧面时,控制器103可以修改负载搬运组件提升高度、转向轮108的最大可允许转向角或转向轮与转向设备的比率中的至少一个。例如,一旦感测设备300感测到并且控制器103确定车辆10位于过道内并且另一个物体在车辆200a的前方或侧面,控制器103就可以减小叉架226和叉子216可以升高到的最大高度。此外,当位置信息指示车辆10定位在过道内并且物体信息指示另一个物体在车辆的前方或侧面时,控制器103可以将最大可允许转向角从第一最大可允许转向角减小到第二最大可允许转向角,其中第二最大可允许转向角小于第一最大可允许转向角。还预期当车辆进入过道并且在车辆10的前方或侧面检测到物体时,转向轮与转向设备的比率可以从较大的比率改变为较小的比率以使转向轮108的转向不太敏感。
93.在另一个示例中,当位置信息指示车辆10位于过道内时,控制器103可以通过将提升架226移动到中间高度来修改负载搬运组件提升高度。因此,当控制器103确定车辆已进入过道时,控制器103将自动把提升架226升高到中间高度,使得操作者在拣选物品时不必弯腰将物品放在位于较低位置的叉子216,即靠近车辆行驶的表面上。中间高度可以取决于车辆10正在操作的环境。例如,中间高度可以取决于车辆10当前正在其中操作的过道和/或当前正在操作车辆10的操作者。当车辆10在其中要放置在叉子216上的物品大的过道中操作时,与车辆10在其中要放置在叉子216上的物品小的过道中操作时相比,将中间高度预配置到较低位置可能是有利的。类似地,当车辆10由矮个操作者操作时,将中间高度预配置到比当车辆10由高个操作者操作时更低的位置可能是有利的。
94.此外,在控制器103使用位置信息来修改多个车辆参数的情况下,可以仅根据情况修改选择一个或多个车辆参数。例如,仅当例如如由感测系统250所确定的,确定操作者不存在于操作者站20中时,控制器103才可以修改一个或多个车辆参数。作为另一个示例,仅当操作者使用与车辆10配对的远程控制设备32远程控制车辆10时,控制器103才可以修改一个或多个车辆参数。
95.现在参考图5a,示例性方法330被示出以图示确定车辆10的位置信息。在步骤332处,控制器103使用来自感测设备300的位置信息确定车辆10位于过道210内。根据该步骤332,位置信息用于确定从车辆10到车辆10的第一侧的第一货架202a的距离d1,加上从车辆
10到位于车辆10的第二侧的第二货架202b的距离d2,加上车辆10的宽度(假设距离d1和d2是从车辆10的左右边缘到相应货架202a、202b测量的)等于或在过道210的已知宽度的预定义范围内。
96.在步骤334处,当从车辆10到第一货架202a的距离d1等于或在从车辆10到第二货架202b的距离d2的预定公差内时,控制器103使用来自感测设备300的位置信息确定车辆10位于过道210的中心。然后在步骤336处,例如,由操作者使用操作者控件24或远程控制设备32使车辆10在过道210内移动。在其在过道210中的新地点中,在步骤338处,车辆10由控制器103确定为位于距第一或第二货架202a或202b之一的预定义拥抱距离(下面更详细地解释拥抱距离)处或该预定义拥抱距离的预定容差内。在步骤340处,例如由控制器103使用来自感测系统250的信息确定操作者已经离开操作者站20。基于车辆10在距第一或第二货架202a或202b之一的预定义拥抱距离处或在该预定义拥抱距离的预定容差范围内,并且基于操作者已经离开车辆10,车辆10由控制器103在步骤342处确定为处于或准备进入拥抱模式。注意的是,虽然可以设置预定义拥抱距离使得车辆10在车辆10拥抱物体时维持在过道210的中心,但是本示例性实施例假设预定义拥抱距离被设置成使得车辆10将比另一个更靠近第一或第二货架202a或202b之一。
97.根据另一个实施例,系统8还可以包括定位辅助系统350,如图5和图6a-6e中所示。可以结合到控制器103中的定位辅助系统350向驾驶车辆10的操作者提供辅助,诸如通过使用操作者控件24将车辆10定位在过道210内。定位辅助系统350从感测设备300接收信息以确定从车辆10到一个或多个边界物体(例如位于车辆10的相应左右两侧ls,rs的第一和第二货架202a和202b)的距离d1和d2,并且还确定车辆10相对于(一个或多个)边界物体的航向,其中航向被定义为卡车在过道210内相对于(一个或多个)边界物体中的至少一个被定向的角度。
98.由定位辅助系统350提供的辅助可以包括(一个或多个)听觉、触觉或视觉提示中的至少一个,以指示从车辆10到至少一个边界物体的间距,例如,从车辆10到边界物体的距离,诸如横向距离,和/或车辆10相对于边界物体的航向中的至少一个。在这点上,定位辅助系统350包括用于实现听觉、触觉和/或视觉提示的提示设备352。例如,可以启动听觉、触觉和/或视觉提示以指示:车辆位于等于或大于距边界物体的期望距离的距离处;车辆相对于边界物体位于正确航向;车辆不位于等于或大于距边界物体的期望距离的距离处;和/或车辆相对于边界物体不位于正确航向。用于指示不同信息的提示可以是可彼此区分的,以便将提示的含义传达给操作者。
99.图6a-6e描绘了车辆10逐渐进入过道210,同时由操作者o
p
手动驾驶,操作者o
p
在图6a-6e中示出在车辆10上的示例性位置。图6a-6e示出了在操作者o
p
将车辆10驾驶到过道210中的一个特定迭代期间车辆10的示例性位置。应该理解的是,在实践中,操作者可以采用任意数量的不同路径进入过道,定位辅助系统350基于车辆10的位置做出适当的响应。
100.在图6a中,从车辆10到第一货架202a的距离d1(如上所述,距离d1和d2是在车辆10和货架202a、202b之间沿着横向方向ld测量的)小于期望距离,即从车辆10到第一货架202a的距离d1不等于或大于期望距离。在这种情况下,定位辅助系统350可以以第一方式发出听觉、触觉和/或视觉的第一提示360,以便操作者o
p
使车辆10转向远离第一货架202a。如果第一提示360是视觉提示,那么它可以由提示设备352显示在车辆10前方和其右侧rs的地板
上。作为示例,第一提示360在图6a中示出为指向远离第一货架202a的箭头,指示车辆10必须向右转向,但是可以使用任何合适的提示360。作为另一个示例,第一提示360可以显示在位于车辆10上的显示设备上(例如,作为消息或作为在图4c中所示的触摸屏ts上指向右侧的箭头)。注意的是,如本文所使用的关于所描述的各种提示的术语第一、第二、第三等并不意味着限于用于所述目的,即,本文针对图6a-6e描述的各种提示跟随由操作者o
p
驾驶的车辆10进入过道210的具体示例性进展。因此,与本文所述的“第一提示”相关联的动作可以与在由操作者o
p
驾驶的车辆10进入过道210的另一个进展中的第二、第三等提示相关联。
101.转到图6b,操作者o
p
已将车辆10转向远离第一货架202a并朝向第二货架202b。在图6b中,车辆10不再处于从车辆10到第一货架202a的距离d1小于期望距离的位置,使得第一提示360已经关闭(与第一提示360可区分的另一个提示可以由定位辅助系统350至少短暂地或间歇地启动,以指示从车辆10到第一货架202a的距离d1大于或等于期望距离)。但是,在图6b中,车辆10相对于第二货架202b不位于正确航向。车辆10的正确航向可以被定义为车辆10相对于边界物体(诸如在预定义范围内的货架202a、202b中的一个或两个)的航向,例如,其中车辆10的纵向轴线la相对于由相应货架202a或202b的边缘限定的平面p成0至10度。在这种情况下,定位辅助系统350可以以第二方式发出听觉、触觉和/或视觉的第二提示362,以便操作者o
p
将车辆10转向远离第二货架202b,以减小车辆10相对于第二货架202b的角度。如果第二提示362是视觉提示,那么它可以通过提示设备352显示在车辆10前方和其左侧ls的地板上。作为示例,第二提示362在图6b中被示出为指向远离第二货架202b的箭头,指示车辆10必须转向左侧,但是可以使用任何合适的提示362。作为另一个示例,第二提示362可以显示在显示设备上(例如,作为消息或作为在触摸屏ts上指向左侧的箭头)。注意的是,在典型的过道210中,第一和第二货架202a、202b通常是平行的,从而可以确定车辆10相对于货架202a、202b中的任一个处于正确或不正确航向。
102.现在转向图6c,操作者o
p
已将车辆10转向远离第二货架202b并朝向第一货架202a,从而改变车辆10的航向。在图6c中,车辆10不再处于相对于第二货架202b的航向不合适的位置,使得第二提示362已经关闭(与第二提示362可区分的另一个提示可以由定位辅助系统350至少短暂地或间歇地启动,以指示车辆10不再处于相对于第二货架202b的航向不合适的位置)。但是,在图6c中,从车辆10到第二货架202b的距离d2小于期望距离。在这种情况下,定位辅助系统350可以以第三方式发出听觉、触觉和/或视觉的第三提示364,以便操作者o
p
使车辆10转向远离第二货架202b。如果第三提示364是视觉提示,那么它可以通过提示设备352显示在车辆10前方的地板上和其左侧ls。作为示例,第三提示364在图6c中被示出为指向远离第二货架202b的箭头,指示车辆10必须转向左侧,但是可以使用任何合适的提示364。作为另一个示例,第三提示364可以显示在显示设备上(例如,作为消息或作为触摸屏ts上指向左侧的箭头)。
103.现在参考图6d,操作者o
p
已经将车辆10转向远离第二货架202b并朝向第一货架202a。在图6d中,车辆10不再处于从车辆10到第二货架202b的距离d2小于期望距离的位置,使得第三提示364已经关闭(与第三提示364可区分的另一个提示可以由定位辅助系统350至少短暂地或间歇地启动,以指示从车辆10到第二货架202b的距离d1大于或等于期望距离)。但是,在图6d中,车辆10相对于第一货架202a不位于正确航向。在这种情况下,定位辅助系统350可以以第四方式发出听觉、触觉和/或视觉的第四提示366,以便操作者o
p
使车辆
10转向远离第一货架202a,以减小车辆10相对于第一货架202a的角度。如果第四提示366是视觉提示,它可以由提示设备352显示在车辆10前方和其右侧rs的地板上。作为示例,第四提示366在图6d中被示出为指向远离第一货架202a的箭头,指示车辆10必须向右转向,但是可以使用任何合适的提示366。作为另一个示例,第四提示366可以显示在显示设备上(例如,作为消息或作为触摸屏ts上指向右侧的箭头)。
104.最后参考图6e,车辆10通常定位在过道210的中心,位于等于或大于距第一和第二货架202a、202b的期望距离的距离处,并且相对于第一和第二货架202a、202b具有直线航向,即图6e中车辆10的纵向轴线la大致平行于由第一和第二货架202a、202b的边缘限定的平面p。在这种情况下,定位辅助系统350可以至少短暂地或间歇性地以第五方式向操作者o
p
发出听觉、触觉和/或视觉第五提示368,车辆10位于等于或大于距第一和第二货架202a、202b的期望距离的距离处,并且车辆10被定向在正确航向。作为示例,第五提示368在图6e中被示出为地板上的箭头,该箭头直接指向过道210,但是可以使用任何合适的提示368。作为另一个示例,第五提示368可以显示在显示设备上(例如,作为消息或作为标记,例如,触摸屏ts上的复选标记)。作为另一个特征,可以使用单独的提示来指示车辆10位于等于或大于距货架202a、202b的期望距离的位置,并且车辆10被定向在正确航向。注意的是,定位辅助系统350可以向操作者o
p
发出单独的听觉、触觉和/或视觉提示,车辆10位于等于或大于距第一和第二货架202a、202b的期望距离的距离处,并且车辆10被定向在正确航向。
105.提示360、362、364、366、368中的一个或多个可以是可与其它提示中的一个或多个可区分的。例如,如果提示360、362、364、366、368是视觉提示,那么它们可以是不同的颜色或形状、具有不同的照明模式(闪烁、改变强度、大小)等。
106.仅当车辆10位于距离d1和d2等于或大于距两个货架202a、202b的期望距离的位置,并且车辆10被定向在正确航向时,车辆10才能够由操作者使用远程控制设备32进行远程控制,即车辆10不能由操作者使用远程控制设备32进行远程控制,除非车辆10位于距离d1和d2等于或大于距两个货架202a、202b的期望距离的位置,并且车辆10被定向在正确航向。如上所述,定位辅助系统350可以发出听觉、触觉和/或视觉第五提示368,以指示车辆10的这种定位。当被远程控制时,车辆可以能够以拥抱模式操作,其中车辆10沿着过道210移动并且拥抱第一或第二货架202a或202b中的一个,其中在拥抱货架202a或202b时,车辆10维持与被拥抱的货架202a或202b预定义的拥抱距离。
107.参考图6f和6g,示例性方法370被示出以说明辅助操作者将车辆10正确定位在过道210中。注意的是,下面列出的和图6f和6g中所示的步骤的顺序可以是不同的顺序,和/或这些步骤可以基于当车辆10进入过道210时和/或当车辆10在通道210内被驾驶时车辆10的位置自身重复。
108.在步骤372处,操作者o
p
正在例如使用车辆10上的操作者控制器24驾驶车辆10进入过道210。在步骤374处,确定车辆10位于距第一货架202a的期望距离内,并且由定位辅助系统350发出第一提示360。在步骤376处,操作者o
p
通过将车辆10转向远离第一货架202a来响应第一提示360,并且一旦车辆10位于距第一货架202a的期望距离之外,第一提示360就被关闭。
109.在步骤378处,确定车辆10相对于第二货架202b不位于正确航向,并且由定位辅助系统350发出第二提示362。在步骤380处,操作者o
p
通过相对于边界物体使车辆10转向,例
如,在所示实施例中远离第二货架202b来响应第二提示362,并且一旦车辆10在定义车辆10相对于第二货架202b的正确航向的范围内,第二提示362就被关闭。
110.在步骤382处,确定车辆10位于距第二货架202b的期望距离内,并且由定位辅助系统350发出第三提示364。在步骤384处,操作者o
p
通过将车辆10转向远离第二货架202b来响应第三提示364,并且一旦车辆10位于距第二货架202b的期望距离之外,第三提示364就被关闭。
111.在转向离开第二货架202b之后,在步骤386处,确定车辆10相对于第一货架202a不位于正确航向,并且定位辅助系统350发出第四提示366。在步骤388处,操作者o
p
通过将车辆10转向远离第一货架202a来响应第四提示366,并且一旦车辆10在定义车辆10相对于第一货架202a的正确航向的范围内,第四提示366就被关闭。
112.在步骤390处,确定车辆10位于等于或大于距两个货架202a、202b的期望距离的位置,并且车辆10相对于第一和第二货架202a、202b被定向在正确航向。在满足这两个标准的情况下,由定位辅助系统350发出第五提示368,指示车辆10处于操作者o
p
能够使用远程控制设备32进行远程操作的位置。
113.现在参考图7,根据实施例的物料搬运车辆10可以配备有负载搬运组件12,该负载搬运组件12具有比相同类型的传统物料搬运车辆更短的叉子16。具有传统叉子长度l
t
的叉子16
′
在图7中以短划线/虚线示出,并且根据实施例的具有长度l
sf
的叉子16在图8中以实线示出。图7中所示车辆10类型的示例性传统叉子16
′
具有约2400mm至约2880mm的长度l
t
,并且根据实施例的示例性叉子16具有约1000mm至约2150mm的长度l
sf
。
114.图8中示出了根据另一个实施例的与物料搬运车辆一起使用的推车500。推车500可以包括装载搬运组件12的可拆卸或永久部分并且包括一个或多个搁板或层502a、502b、502c(推车500在所示实施例中包括三层,但是可以使用任何数量的层),其中每个层502a-502c支持操作者挑选的物品。每个层502a-502c可以包括在推车500的左侧和右侧的侧壁504和在推车后部的后壁506,侧壁504和后壁506防止拾取的物品从推车500掉出并且还防止从推车500的侧面或背面向外延伸。推车500的宽度wc可以等于或小于车辆10的宽度。
115.推车500还包括滚轮508,当物品被操作者拾取并放置在推车500上时,滚轮508使拾取的物品能够朝推车500的后壁506滚动。
116.推车500的每个特征,即侧壁504和后壁506、宽度wc和滚轮508,包括图7中描述的较短的叉子16,允许物料搬运车辆10在狭窄的过道210中驾驶和转弯,同时防止叉子16、推车500和/或拾取的物品与过道210中的墙壁或货架接触。具体而言,由于叉子16较短,在转弯操纵期间,叉子16不会像传统叉子那样向外摆动到转弯的相对侧。推车500的侧壁504和后壁506有助于防止推车500上的拾取物品从推车500的侧面和背面向外延伸,从而避免与过道210中的墙壁或货架接触。推车500的宽度wc不大于车辆10的宽度防止了推车500的侧部向外延伸超过车辆10的侧部,从而避免推车500与墙壁或货架接触。滚轮508允许操作者从推车500的后部向推车500装载拾取的物品,使得操作者可以在使用远程控制设备32远程控制车辆10的同时在车辆10后面行走,而不是在其中狭窄过道210中的空间可能有限的车辆10旁边行走。
117.现在参考图9,提供了检测系统600,用于监视指定区域,诸如仓库或其它设施的过道210。检测系统600可以被配置为防止或阻止第二物料搬运车辆10b进入已经存在第一物
料搬运车辆10a的指定区域。在这点上,检测系统600可以被配置为提供警告,例如,警告声或闪光,以提醒第二车辆10b的操作者不要进入该区域。可替代地,检测系统600可以被配置为例如诸如使用从检测系统600或从仓库管理系统wms发送到第二车辆10b的行驶覆盖命令(检测系统600将与仓库管理系统wms通信)使得第二车辆10b被阻止移动到指定区域。
118.检测系统600可以安装在指定区域附近,诸如在货架的顶部,或者在设施的墙壁或天花板上。可替代地,检测系统600可以结合到车辆10a、10b本身中。例如,车辆10a和10b可以通过车辆10a、10b之间的直接通信或者通过与仓库管理系统wms的通信来知道彼此的地点。
119.该实施例在空间有限的设施中可能特别有益,诸如具有狭窄过道的设施(例如,其中两辆车不会并排适合在过道中),以及其中车辆例如经由诸如本文公开的无线远程控制设备32被远程控制的地方。
120.本文中描述的各种特征、方面和实施例可以在彼此或其单独的任何(一个或多个)组合中使用。
121.已经如此详细地描述了实施例,显然可以在不脱离所附权利要求的范围的情况下进行修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。