1.本实用新型涉及吊装机械臂技术领域,具体涉及一种可刚柔适应性调整的吊装机械臂。
背景技术:
2.常见的吊装机械臂,在吊载过程中,由于钢丝绳是柔性的,被吊物品在吊装过程中易受外力因素影响发生摇摆、打转、绕绳等现象,不仅使得被吊物品无法准确落位,而且会增大辅助人员的工作难度,甚至在极端工况下危及财产和人员安全。进一步的,在吊装重物时,被吊载重物在吊装过程往往会因为操作失误引发较大惯性力,起重设备常因此发生支撑面沉陷,进而发生侧翻,造成事故,同时吊载重物在空中不可控的运动,会对起重设备及周围人身财产存在威胁。
3.目前并无有效的解决办法,一般采取如下方法降低风险:降低起重动作的幅度,减缓运动速度,待吊载重物稳定后再进行操作,并且运行过程中配备有辅助人员协助。但存在如下弊端:工作效率低下、在极端恶劣的工况下(如大风)依旧难以工作、造成人力物力等资源浪费。
技术实现要素:
4.有鉴于此,本实用新型的目的是提供一种可刚柔适应性调整的吊装机械臂,以便有效控制吊具摇摆、打转的情况,提高吊装的工作效率,减少吊装辅助人员的工作强度,确保吊载物体准确落位。
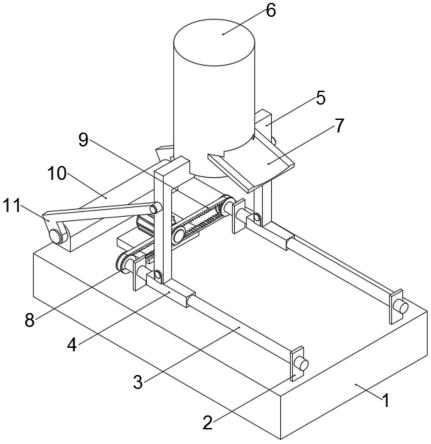
5.本实用新型通过以下技术手段解决上述问题:一种可刚柔适应性调整的吊装机械臂,包括机械臂主体、双出杆摆动缸、限位架、滑体和钢丝绳;所述双出杆摆动缸的缸筒通过销轴与机械臂主体铰接,其中一根活塞杆通过销轴与限位架铰接,双出杆摆动缸的两个腔室之间通过管路连接,所述管路上设置有阀门;所述限位架通过销轴与机械臂主体铰接;所述钢丝绳的一端与机械臂主体连接,另一端绕过限位架和滑体后与牵引机构连接。
6.进一步,所述滑体包括滑轮和滑轮安装架,所述钢丝绳绕过滑轮,所述滑轮通过滑轮轴与滑轮安装架装配连接。
7.进一步,所述限位架的底部设置有与滑轮安装架的顶部匹配卡接的卡槽。
8.进一步,所述双出杆摆动缸为液压缸或气压缸。
9.进一步,所述阀门为电磁阀。
10.进一步,所述双出杆摆动缸的两个腔室的截面积相等。
11.本实用新型的有益效果:
12.1、本申请的可刚柔适应性调整的吊装机械臂,相对于其他不可调的机械臂,通过在机械臂主体的臂头设计防止吊具摇摆的限位架和双出杆摆动缸,通过双出杆摆动缸来实现刚柔自适应调整,实现了吊具吊装过程中的防摇摆功能,可有效控制吊具摇摆、打转,提高了吊装的工作效率,减少了吊装辅助人员的工作强度。
13.2、本申请的可刚柔适应性调整的吊装机械臂,在限位架底部设置卡槽,通过钢丝绳提升滑体,使滑轮安装架的顶部与卡槽匹配性卡接,能进一步提高吊具的防摇性能。
附图说明
14.下面结合附图和实施例对本实用新型作进一步描述。
15.图1为本实用新型的装配示意图;
16.图2为双出杆摆动缸的结构示意图;
17.图3为滑体的主示图;
18.图4为滑体的侧视图;
19.图5为本实用新型的其中一个工作流程示意图。
具体实施方式
20.以下将结合附图和实施例对本实用新型进行详细说明。
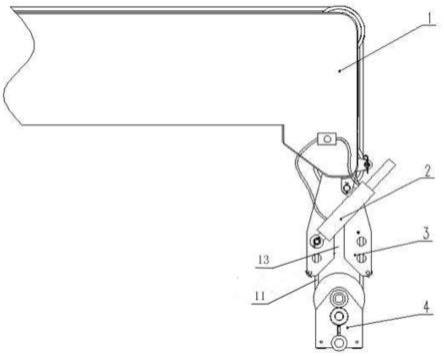
21.如图1-4所示,本实施例的可刚柔适应性调整的吊装机械臂,包括机械臂主体1、双出杆摆动缸2、限位架3、滑体4和钢丝绳11;所述双出杆摆动缸包括缸筒6和两端伸出的活塞杆5,所述缸筒6通过销轴与机械臂主体铰接,所述其中一端的活塞杆5通过销轴与限位架铰接,所述缸筒的两个腔室之间通过管路7连通,所述管路上设置有阀门8,所述双出杆摆动缸为液压缸或气压缸。本实施例中,所述双出杆摆动缸为液压缸,双出杆摆动缸的两个腔室的截面积相等,所述阀门为电磁阀。所述滑体包括滑轮9和滑轮安装架12,所述滑轮通过滑轮轴10与滑轮安装架装配连接。所述限位架通过销轴与机械臂主体铰接;所述钢丝绳的一端与机械臂主体连接,另一端绕过限位架和滑轮后与牵引机构连接。所述限位架的底部设置有与滑轮安装架的顶部匹配卡接的卡槽13。
22.在吊装过程中,吊具与滑体装配,当吊载物执行非回转动作(指变幅、伸臂、升降动作)时,无需防摇,阀门8打开,双出杆摆动缸2的两个腔室之间通过管路7导通,双出杆摆动缸随重物摇摆而适应性伸缩;当吊载物执行回转动作时,需要防摇,阀门关闭,双出杆摆动缸的两个腔室之间不导通,双出杆摆动缸不再适应性伸缩,吊载物因双出杆摆动缸不再伸缩而停止摇摆。同时,双出杆摆动缸在吊装过程中发挥了阻尼的作用,在一定程度上阻止了吊装重物的摆动。
23.如图5所示,当机械臂主体从水平位置变幅动作,幅度变化为k时,此时无需防摇,阀门8打开,双出杆摆动缸2的两个腔室之间导通,双出杆摆动缸随重物摇摆而适应性伸缩,在重力的作用下垂直向下,此时双出杆摆动缸的动作行程为l,这样就确保了吊装重物始终保持垂直向下,吊载动作仍然能够正常进行。随后通过钢丝绳提升滑体,使滑轮安装架的顶部与卡槽匹配性卡接,能进一步提高吊具的防摇性能。
24.综上所述,采用本实施例的可刚柔适应性调整的吊装机械臂,相比其他机械臂其最大的优点在于:解决了吊载物体在吊装过程中受外力因素摇摆、打转,使得被吊物体无法准确落位,增加了辅助人员工作难度的问题,具有在大风等恶劣天气下工作的能力。同时因双出杆摆动缸的阻尼作用,也可避免因突然动作产生的大惯性力而威胁周围财产及人员安全。
25.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参
照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
技术特征:
1.一种可刚柔适应性调整的吊装机械臂,其特征在于:包括机械臂主体(1)、双出杆摆动缸(2)、限位架(3)、滑体(4)和钢丝绳(11);所述双出杆摆动缸的缸筒(6)通过销轴与机械臂主体铰接,其中一根活塞杆(5)通过销轴与限位架铰接,双出杆摆动缸的两个腔室之间通过管路(7)连接,所述管路上设置有阀门(8);所述限位架通过销轴与机械臂主体铰接;所述钢丝绳的一端与机械臂主体连接,另一端绕过限位架和滑体后与牵引机构连接。2.根据权利要求1所述的可刚柔适应性调整的吊装机械臂,其特征在于:所述滑体包括滑轮(9)和滑轮安装架(12),所述钢丝绳绕过滑轮,所述滑轮通过滑轮轴(10)与滑轮安装架装配连接。3.根据权利要求2所述的可刚柔适应性调整的吊装机械臂,其特征在于:所述限位架的底部设置有与滑轮安装架的顶部匹配卡接的卡槽(13)。4.根据权利要求3所述的可刚柔适应性调整的吊装机械臂,其特征在于:所述双出杆摆动缸(2)为液压缸或气压缸。5.根据权利要求4所述的可刚柔适应性调整的吊装机械臂,其特征在于:所述阀门(8)电磁阀。6.根据权利要求5所述的可刚柔适应性调整的吊装机械臂,其特征在于:所述双出杆摆动缸(2)的两个腔室的截面积相等。
技术总结
本实用新型公开了一种可刚柔适应性调整的吊装机械臂,包括机械臂主体、双出杆摆动缸、限位架、滑体和钢丝绳;所述双出杆摆动缸的缸筒通过销轴与机械臂主体铰接,其中一根活塞杆通过销轴与限位架铰接,双出杆摆动缸的两个腔室之间通过管路连接,所述管路上设置有阀门;所述限位架通过销轴与机械臂主体铰接;所述钢丝绳的一端与机械臂主体连接,另一端绕过限位架和滑体后与牵引机构连接。采用本申请的吊装机械臂,可有效控制吊具摇摆、打转的情况,提高了吊装的工作效率,减少了吊装辅助人员的工作强度,确保了吊载物体准确落位。确保了吊载物体准确落位。确保了吊载物体准确落位。
技术研发人员:宋良学 王鸿 彭长峰
受保护的技术使用者:山河智能特种装备有限公司
技术研发日:2022.03.21
技术公布日:2022/8/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。