纺纱加工用清花抓棉遇异物自动停车报警装置
1.技术领域
2.本发明涉及纺纱技术领域,具体是涉及纺纱加工用清花抓棉遇异物自动停车报警装置。
背景技术:
3.棉花是世界上最主要的农作物之一,产量大、生产成本低,使棉制品价格比较低廉。棉纤维能制成多种规格的织物,从轻盈透明的巴里纱到厚实的帆布和厚平绒,适于制作各类衣服棉花、家具布和工业用布,棉纱纺纱首先将原料的棉花原料进行抓棉清理,然后将清理后的棉花进行松棉、梳理,经过多道松棉梳理之后得到初步的棉条,在实际生产过程中会用到圆盘式清花机,清花时,将原材料进行堆积在一起用清花机进行清花抓棉并在输棉管的作用下将半成品棉花输送到下一道工序中,在清花过程中,由于清花抓棉小车按圆形轨迹运行,清花抓棉打手的外圈路程一般是内圈路程的三倍多,所以,当清花抓棉小车往复移动时,随着堆积的棉花料的下降和形成内圈抓棉细、抓取量大;外圈抓棉粗,抓取量少,这样会容易出现外圈的棉层堆积越积越高,最终组织小车无法正常运行,甚至造成堵料噎车、损坏机件、烧毁电机等情况,影响生产进度,且棉层中往往夹杂着石头等异物,这些异物可能会被带入下一工序中影响后续生产加工,而且由于这种圆盘式抓棉机的行走小车往往设置在圆盘外侧,绕圆盘做圆周运动,行走小车在移动过程中如果被挡住也会影响设备工作,设备在工作时,有时候会因为飞花,使得棉花飞出至圆盘外缘,往往需要工作人员靠近设备去捡起,这就容易发生危险。因此提供一种纺纱加工用清花抓棉遇异物自动停车报警装置。
技术实现要素:
4.为解决上述技术问题。
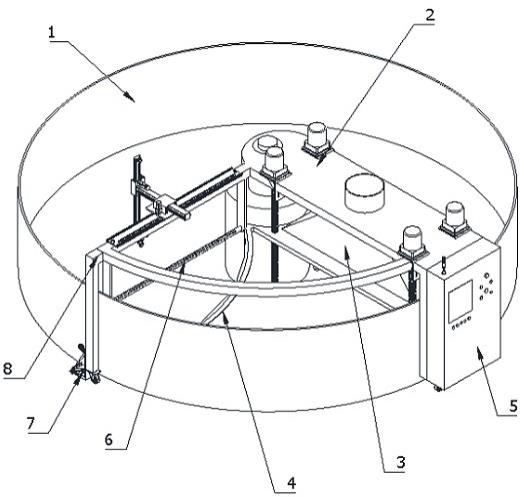
5.本技术提供了纺纱加工用清花抓棉遇异物自动停车报警装置,包括:堆棉圆盘、驱动转架、抓棉机构、平堆机构、抓棉控制小车、盘内遇异物自动停车报警机构和盘外遇异物自动停车报警机构,驱动转架安装在堆棉圆盘内,抓棉机构安装在驱动转架的下方,平堆机构固定安装在驱动转架上且位于抓棉机构的一侧,盘内遇异物自动停车报警机构通过连接架固定安装在驱动转架的一侧,盘外遇异物自动停车报警机构安装在连接架上且位于堆棉圆盘的外侧,抓棉控制小车固定安装在驱动转架上且位于堆棉圆盘的外侧,驱动转架、抓棉机构、盘内遇异物自动停车报警机构和盘外遇异物自动停车报警机构均与抓棉控制小车电性连接。
6.进一步的,所述抓棉机构包括抓棉辊和吸棉罩,抓棉辊和吸棉罩均通过安装架安装在驱动转架的下方,抓棉辊与驱动电机传动连接,吸棉罩与上端的吸棉管连通,抓棉辊为变径变螺距的锥形螺杆结构,抓棉辊靠近堆棉圆盘中心的一端的半径和螺距大于其远离堆棉圆盘中心的一端的半径和螺距。
7.进一步的,所述平堆机构包括平堆刮条和压棉条,平堆刮条靠近堆棉圆盘中心的一端固定连接在安装架的一侧,平堆刮条为弧形结构,压棉条固定设置在平堆刮条的圆弧内侧,压棉条为弧形螺旋结构。
8.进一步的,所述盘内遇异物自动停车报警机构包括异物报警组件和异物清理组件,异物报警组件通过两个伸缩杆安装在连接架的下方,伸缩杆的上端固定在连接架上,伸缩杆的活动端与安装架固定连接,异物报警组件和异物清理组件均与抓棉控制小车电性连接,异物清理组件包括两轴移动桁架和机械手,两轴移动桁架固定安装在连接架的上端,机械手固定安装在两轴移动桁架的下端,两轴移动桁架和机械手均与抓棉控制小车电性连接。
9.进一步的,所述异物报警组件包括活动杆和若干个异物探头,活动杆插设在伸缩杆的下端,所有异物探头均通过铰接杆间隔安装在活动杆上,铰接杆插设在活动杆内,所有异物探头均与铰接杆铰接,活动杆上下均开设有若干个间隔设置的活动槽,每个活动槽均与对应的异物探头滑动连接,异物探头与抓棉控制小车电性连接。
10.进一步的,所述异物探头包括转板和弧形槽板,转板铰接在铰接杆上,弧形槽板固定设置在转板的上端,弧形槽板与活动杆内壁贴合且与活动槽配合密封,转板的上端伸出弧形槽板和活动杆上端的活动槽,弧形转板的下端设置有探板,探板伸出活动杆下端的活动槽能够与棉料表面接触。
11.进一步的,所述转板的顶部安装有显位灯,转板的下侧面固定安装有磁片,磁片能够与活动杆上端活动槽的下边缘磁接,转板和弧形槽板的上弧端以及铰接杆均能够导电,活动杆内壁靠近上端活动槽的一侧设置有导电板,弧形槽板的上弧端能够与导电板抵接导电,显位灯、铰接杆以及导电板均与抓棉控制小车电连接。
12.进一步的,所述盘外遇异物自动停车报警机构包括触压式报警器和外铲物组件,触压式报警器通过固定座固定安装在位于堆棉圆盘外侧的连接架的下端,触压式报警器与固定座卡接,外铲物组件安装在固定座上且位于触压式报警器的上方,触压式报警器与外铲物组件的下端抵接,触压式报警器和外铲物组件均与抓棉控制小车电性连接。
13.进一步的,所述外铲物组件包括铲物板、电动推杆和支杆,铲物板通过转筒能够转动的安装在固定座远离堆棉圆盘的一侧,支杆插设在转筒内,支杆的上端与电动推杆的输出端铰接,电动推杆的固定端与固定座的上端铰接,转筒外侧套设有扭簧,扭簧的上下两端分别与转筒上端以及固定座固定连接,转筒上端垂直与转筒轴线方向固定设置有滑杆,支杆的上端固定设置有楔形块,楔形块的斜面与滑杆抵接,电动推杆与抓棉控制小车电性连接。
14.进一步的,包括如下实施方法:步骤一:通过抓棉控制小车控制驱动转架和抓棉机构、盘内遇异物自动停车报警机构和盘外遇异物自动停车报警机构工作,首先在工作时通过将抓棉辊设置成变径变螺距的锥形螺杆结构,使得抓棉辊两端的抓棉量相同,保证抓棉的均匀性,通过平堆刮条对棉层表面进行刮平,通过其弧形结构实现平堆刮条在转动过程中将外圈堆积的棉料自外向内刮平,同时通过压棉条将刮起的棉料下压,能够使得夹杂在棉堆上的异物刮平暴露;步骤二:通过异物报警组件发现异物并停机报警,然后由抓棉控制小车控制异物清理组件将异物进行清理,根据异物报警组件发现异物所在位置,通过两轴移动桁架将机
械手移动至对应位置,并将异物夹取出,实现了异物发现后的自动清理,异物探头触发报警通过异物探头发现异物,有探板接触棉料表面,当探板接触到异物,由于相对运动,异物会将探板顶起,探板这推动弧形槽板和转板绕铰接杆转动,弧形槽板则始终将活动槽密封防止棉料被圈进活动杆内部;步骤三:首先,当异物与探板接触后,异物推动探板和弧形槽板转动,弧形槽板的上弧端转至导电板处,使得导电板、铰接杆、转板、弧形槽板的上弧端以及显位灯形成电路连通,进而使得显位灯亮起,同时抓棉控制小车上的报警灯闪烁,抓棉控制小车自动控制设备停机,抓棉控制小车控制两轴移动桁架和机械手移动至显位灯亮的区域,将异物自动夹取,异物清理出以后,由于磁片的作用,使得转板带动弧形槽板复位,电路断开;步骤四:通过触压式报警器和外铲物组件对位于堆棉圆盘外缘的异物进行清理,由于相对运动,使得异物能够撞击外铲物组件,外铲物组件抵压触压式报警器,使得触压式报警器发生报警,进而抓棉控制小车控制设备停机,同时控制外铲物组件将异物清出其运动轨道之外,首先,当相对运动过程中,异物撞击铲物板后,铲物板和转筒绕支杆转动,使得铲物板与触压式报警器抵接,触压,使得触压式报警器响起,抓棉控制小车则控制设备转动停机,然后抓棉控制小车控制电动推杆工作,电动推杆推动支杆向下运动,支杆上的楔形块这抵压滑杆,使得滑杆带动转筒扭转,进而带动铲物板向外侧转动,从而将异物铲出其运动轨道。
15.本发明与现有技术相比具有的有益效果是:1.本技术通过驱动转架带动抓棉机构、平堆机构、抓棉控制小车、盘内遇异物自动停车报警机构和盘外遇异物自动停车报警机构在堆棉圆盘上做圆周运动,实现往复式清花抓棉,通过抓棉机构和平堆机构实现抓棉的均匀,通过盘内遇异物自动停车报警机构和盘外遇异物自动停车报警机构实现盘内和盘外异物发现并及时停机报警,并且能够对异物进行自动清理。
16.2.本技术为了解决圆盘式抓棉设备清花抓棉辊的外圈路程一般是内圈路程的三倍多,所以,当清花抓棉控制小车往复移动时,随着堆积的棉花料的下降和形成内圈抓棉细、抓取量大;外圈抓棉粗,抓取量少,这样会容易出现外圈的棉层堆积越积越高的技术问题,本发明通过将抓棉辊设置成变径变螺距的锥形螺杆结构,使得抓棉辊两端的抓棉量相同,保证抓棉的均匀性,防止棉料在堆棉圆盘堆积,并影响设备运行。
17.3.本技术为了解决棉堆中异物的发现报警,以及异物的清理的技术问题,本发明通过异物报警组件发现异物并停机报警,然后由抓棉控制小车控制异物清理组件将异物进行清理,根据异物报警组件发现异物所在位置,通过两轴移动桁架将机械手移动至对应位置,并将异物夹取出,实现了异物发现后的自动清理,避免了人员操作,提高了工作效率。
18.4.本技术为了能够准确显示异物的所在位置,方便异物夹取,本发明通过显位灯显示异物所在区域,首先,当异物与探板接触后,异物推动探板和弧形槽板转动,弧形槽板的上弧端转至导电板处,使得导电板、铰接杆、转板、弧形槽板的上弧端以及显位灯形成电路连通,进而使得显位灯亮起,同时抓棉控制小车上的报警灯闪烁,抓棉控制小车自动控制设备停机,抓棉控制小车控制两轴移动桁架和机械手移动至显位灯亮的区域,将异物自动夹取。
19.5.本技术为了解决堆棉圆盘外侧的异物清理和报警的技术问题,本发明通过触压
式报警器和外铲物组件对位于堆棉圆盘外缘的异物进行清理,由于相对运动,使得异物能够撞击外铲物组件,外铲物组件抵压触压式报警器,使得触压式报警器发生报警,进而抓棉控制小车控制设备停机,同时控制外铲物组件将异物清出其运动轨道之外。
附图说明
20.图1为本发明的立体结构示意图一;图2为本发明的立体结构示意图二;图3为本发明的立体结构示意图三;图4为本发明的俯视图一;图5为本发明的内部机构的主视图;图6为本发明的立体结构示意图四;图7为本发明的立体结构示意图五;图8为本发明的盘内遇异物自动停车报警机构的立体结构示意图;图9为图8中a-a处的剖视图;图10为异物探头的立体结构示意图;图11为盘外遇异物自动停车报警机构的立体结构示意图。
21.图中标号为:堆棉圆盘1,驱动转架2,抓棉机构3,平堆机构4,抓棉控制小车5,盘内遇异物自动停车报警机构6,盘外遇异物自动停车报警机构7,连接架8;抓棉辊3a,吸棉罩3b,安装架3c;平堆刮条4a,压棉条4b;异物报警组件6a,异物清理组件6b,伸缩杆6c,两轴移动桁架6b1,机械手6b2,活动杆6a1,异物探头6a2,铰接杆6a3,活动槽6a4,转板6a5,弧形槽板6a6,探板6a7,显位灯6a8,磁片6a9,导电板6a10;触压式报警器7a,外铲物组件7b,固定座7c,铲物板7b1,电动推杆7b2,支杆7b3,转筒7b4,扭簧7b5,滑杆7b6,楔形块7b7。
具体实施方式
22.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
23.如图1至图3所示,提供以下优选技术方案:纺纱加工用清花抓棉遇异物自动停车报警装置,包括:堆棉圆盘1、驱动转架2、抓棉机构3、平堆机构4、抓棉控制小车5、盘内遇异物自动停车报警机构6和盘外遇异物自动停车报警机构7,驱动转架2安装在堆棉圆盘1内,抓棉机构3安装在驱动转架2的下方,平堆机构4固定安装在驱动转架2上且位于抓棉机构3的一侧,盘内遇异物自动停车报警机构6通过连接架8固定安装在驱动转架2的一侧,盘外遇异物自动停车报警机构7安装在连接架8上且位于堆棉圆盘1的外侧,抓棉控制小车5固定安装在驱动转架2上且位于堆棉圆盘1的外侧,驱动转架2、抓棉机构3、盘内遇异物自动停车报警机构6和盘外遇异物自动停车报警机构7均与抓棉控制小车5电性连接。
24.具体的,为了解决清花抓棉过程中盘内异物发现及停机报警,以及盘外遇异物自动停车报警及异物的自动清理的技术问题,本发明通过驱动转架2带动抓棉机构3、平堆机构4、抓棉控制小车5、盘内遇异物自动停车报警机构6和盘外遇异物自动停车报警机构7在堆棉圆盘1上做圆周运动,实现往复式清花抓棉,通过抓棉机构3和平堆机构4实现抓棉的均匀,通过盘内遇异物自动停车报警机构6和盘外遇异物自动停车报警机构7实现盘内和盘外异物发现并及时停机报警,并且能够对异物进行自动清理。
25.如图2和图5所示,提供以下优选技术方案:抓棉机构3包括抓棉辊3a和吸棉罩3b,抓棉辊3a和吸棉罩3b均通过安装架3c安装在驱动转架2的下方,抓棉辊3a与驱动电机传动连接,吸棉罩3b与上端的吸棉管连通,抓棉辊3a为变径变螺距的锥形螺杆结构,抓棉辊3a靠近堆棉圆盘1中心的一端的半径和螺距大于其远离堆棉圆盘1中心的一端的半径和螺距。
26.具体的,为了解决圆盘式抓棉设备清花抓棉辊3a的外圈路程一般是内圈路程的三倍多,所以,当清花抓棉控制小车5往复移动时,随着堆积的棉花料的下降和形成内圈抓棉细、抓取量大;外圈抓棉粗,抓取量少,这样会容易出现外圈的棉层堆积越积越高的技术问题,本发明通过将抓棉辊3a设置成变径变螺距的锥形螺杆结构,使得抓棉辊3a两端的抓棉量相同,保证抓棉的均匀性,防止棉料在堆棉圆盘1堆积,并影响设备运行。
27.如图3所示,提供以下优选技术方案:平堆机构4包括平堆刮条4a和压棉条4b,平堆刮条4a靠近堆棉圆盘1中心的一端固定连接在安装架3c的一侧,平堆刮条4a为弧形结构,压棉条4b固定设置在平堆刮条4a的圆弧内侧,压棉条4b为弧形螺旋结构。
28.具体的,为了解决外圈的棉层堆积的技术问题,本发明通过平堆刮条4a对棉层表面进行刮平,通过其弧形结构实现平堆刮条4a在转动过程中将外圈堆积的棉料自外向内刮平,同时通过压棉条4b将刮起的棉料下压,传统设备则需要将设备停机,通过人工将堆积的棉料分平,而且也能够使得夹杂在棉堆上的异物刮平暴露。
29.如图3至图5所示,提供以下优选技术方案:盘内遇异物自动停车报警机构6包括异物报警组件6a和异物清理组件6b,异物报警组件6a通过两个伸缩杆6c安装在连接架8的下方,伸缩杆6c的上端固定在连接架8上,伸缩杆6c的活动端与安装架3c固定连接,异物报警组件6a和异物清理组件6b均与抓棉控制小车5电性连接,异物清理组件6b包括两轴移动桁架6b1和机械手6b2,两轴移动桁架6b1固定安装在连接架8的上端,机械手6b2固定安装在两轴移动桁架6b1的下端,两轴移动桁架6b1和机械手6b2均与抓棉控制小车5电性连接。
30.具体的,为了解决棉堆中异物的发现报警,以及异物的清理的技术问题,本发明通过异物报警组件6a发现异物并停机报警,然后由抓棉控制小车5控制异物清理组件6b将异物进行清理,根据异物报警组件6a发现异物所在位置,通过两轴移动桁架6b1将机械手6b2移动至对应位置,并将异物夹取出,实现了异物发现后的自动清理,避免了人员操作,提高了工作效率。
31.如图8至图10所示,提供以下优选技术方案:异物报警组件6a包括活动杆6a1和若干个异物探头6a2,活动杆6a1插设在伸缩杆6c的下端,所有异物探头6a2均通过铰接杆6a3间隔安装在活动杆6a1上,铰接杆6a3插设在
活动杆6a1内,所有异物探头6a2均与铰接杆6a3铰接,活动杆6a1上下均开设有若干个间隔设置的活动槽6a4,每个活动槽6a4均与对应的异物探头6a2滑动连接,异物探头6a2与抓棉控制小车5电性连接。
32.具体的,为了解决棉堆异物发现和停机报警的技术问题,本发明通过设置若干个异物探头6a2发现异物并及时报警,异物探头6a2在接触到异物后,使得异物探头6a2转动,异物探头6a2触发报警。
33.如图10所示,提供以下优选技术方案:异物探头6a2包括转板6a5和弧形槽板6a6,转板6a5铰接在铰接杆6a3上,弧形槽板6a6固定设置在转板6a5的上端,弧形槽板6a6与活动杆6a1内壁贴合且与活动槽6a4配合密封,转板6a5的上端伸出弧形槽板6a6和活动杆6a1上端的活动槽6a4,弧形转板6a5的下端设置有探板6a7,探板6a7伸出活动杆6a1下端的活动槽6a4能够与棉料表面接触。
34.具体的,为了能够发现棉料表面的异物,方便清理异物,本发明通过异物探头6a2发现异物,有探板6a7接触棉料表面,当探板6a7接触到异物,由于相对运动,异物会将探板6a7顶起,探板6a7这推动弧形槽板6a6和转板6a5绕铰接杆6a3转动,弧形槽板6a6则始终将活动槽6a4密封防止棉料被圈进活动杆6a1内部。
35.如图10所示,提供以下优选技术方案:转板6a5的顶部安装有显位灯6a8,转板6a5的下侧面固定安装有磁片6a9,磁片6a9能够与活动杆6a1上端活动槽6a4的下边缘磁接,转板6a5和弧形槽板6a6的上弧端以及铰接杆6a3均能够导电,活动杆6a1内壁靠近上端活动槽6a4的一侧设置有导电板6a10,弧形槽板6a6的上弧端能够与导电板6a10抵接导电,显位灯6a8、铰接杆6a3以及导电板6a10均与抓棉控制小车5电连接。
36.具体的,为了能够准确显示异物的所在位置,方便异物夹取,本发明通过显位灯6a8显示异物所在区域,首先,当异物与探板6a7接触后,异物推动探板6a7和弧形槽板6a6转动,弧形槽板6a6的上弧端转至导电板6a10处,使得导电板6a10、铰接杆6a3、转板6a5、弧形槽板6a6的上弧端以及显位灯6a8形成电路连通,进而使得显位灯6a8亮起,同时抓棉控制小车5上的报警灯闪烁,抓棉控制小车5自动控制设备停机,抓棉控制小车5控制两轴移动桁架6b1和机械手6b2移动至显位灯6a8亮的区域,将异物自动夹取,异物清理出以后,由于磁片6a9的作用,使得转板6a5带动弧形槽板6a6复位,电路断开。
37.如图7所示,提供以下优选技术方案:盘外遇异物自动停车报警机构7包括触压式报警器7a和外铲物组件7b,触压式报警器7a通过固定座7c固定安装在位于堆棉圆盘1外侧的连接架8的下端,触压式报警器7a与固定座7c卡接,外铲物组件7b安装在固定座7c上且位于触压式报警器7a的上方,触压式报警器7a与外铲物组件7b的下端抵接,触压式报警器7a和外铲物组件7b均与抓棉控制小车5电性连接。
38.具体的,为了解决堆棉圆盘1外侧的异物清理和报警的技术问题,本发明通过触压式报警器7a和外铲物组件7b对位于堆棉圆盘1外缘的异物进行清理,由于相对运动,使得异物能够撞击外铲物组件7b,外铲物组件7b抵压触压式报警器7a,使得触压式报警器7a发生报警,进而抓棉控制小车5控制设备停机,同时控制外铲物组件7b将异物清出其运动轨道之外。
39.如图11所示,提供以下优选技术方案:外铲物组件7b包括铲物板7b1、电动推杆7b2和支杆7b3,铲物板7b1通过转筒7b4能够转动的安装在固定座7c远离堆棉圆盘1的一侧,支杆7b3插设在转筒7b4内,支杆7b3的上端与电动推杆7b2的输出端铰接,电动推杆7b2的固定端与固定座7c的上端铰接,转筒7b4外侧套设有扭簧7b5,扭簧7b5的上下两端分别与转筒7b4上端以及固定座7c固定连接,转筒7b4上端垂直与转筒7b4轴线方向固定设置有滑杆7b6,支杆7b3的上端固定设置有楔形块7b7,楔形块7b7的斜面与滑杆7b6抵接,电动推杆7b2与抓棉控制小车5电性连接。
40.具体的,为了能够将堆棉圆盘1外缘的异物清理出运行轨道,防止异物阻碍抓棉控制小车5运动,本发明通过铲物板7b1和电动推杆7b2将异物铲除,首先,当相对运动过程中,异物撞击铲物板7b1后,铲物板7b1和转筒7b4绕支杆7b3转动,使得铲物板7b1与触压式报警器7a抵接,触压,使得触压式报警器7a响起,抓棉控制小车5则控制设备转动停机,然后抓棉控制小车5控制电动推杆7b2工作,电动推杆7b2推动支杆7b3向下运动,支杆7b3上的楔形块7b7这抵压滑杆7b6,使得滑杆7b6带动转筒7b4扭转,进而带动铲物板7b1向外侧转动,从而将异物铲出其运动轨道。
41.如图1至图11所示,提供以下优选技术方案:包括如下实施方法:步骤一:通过抓棉控制小车5控制驱动转架2和抓棉机构3、盘内遇异物自动停车报警机构6和盘外遇异物自动停车报警机构7工作,首先在工作时通过将抓棉辊3a设置成变径变螺距的锥形螺杆结构,使得抓棉辊3a两端的抓棉量相同,保证抓棉的均匀性,通过平堆刮条4a对棉层表面进行刮平,通过其弧形结构实现平堆刮条4a在转动过程中将外圈堆积的棉料自外向内刮平,同时通过压棉条4b将刮起的棉料下压,能够使得夹杂在棉堆上的异物刮平暴露;步骤二:通过异物报警组件6a1发现异物并停机报警,然后由抓棉控制小车5控制异物清理组件6b将异物进行清理,根据异物报警组件6a1发现异物所在位置,通过两轴移动桁架6b1将机械手6b2移动至对应位置,并将异物夹取出,实现了异物发现后的自动清理,异物探头6a2触发报警通过异物探头6a2发现异物,有探板6a7接触棉料表面,当探板6a7接触到异物,由于相对运动,异物会将探板6a7顶起,探板6a7这推动弧形槽板6a6和转板6a5绕铰接杆6a3转动,弧形槽板6a6则始终将活动槽6a4密封防止棉料被圈进活动杆6a1内部;步骤三:首先,当异物与探板6a7接触后,异物推动探板6a7和弧形槽板6a6转动,弧形槽板6a6的上弧端转至导电板6a10处,使得导电板6a10、铰接杆6a3、转板6a5、弧形槽板6a6的上弧端以及显位灯6a8形成电路连通,进而使得显位灯6a8亮起,同时抓棉控制小车5上的报警灯闪烁,抓棉控制小车5自动控制设备停机,抓棉控制小车5控制两轴移动桁架6b1和机械手6b2移动至显位灯6a8亮的区域,将异物自动夹取,异物清理出以后,由于磁片6a9的作用,使得转板6a5带动弧形槽板6a6复位,电路断开;步骤四:通过触压式报警器7a和外铲物组件7b对位于堆棉圆盘1外缘的异物进行清理,由于相对运动,使得异物能够撞击外铲物组件7b,外铲物组件7b抵压触压式报警器7a,使得触压式报警器7a发生报警,进而抓棉控制小车5控制设备停机,同时控制外铲物组件7b将异物清出其运动轨道之外,首先,当相对运动过程中,异物撞击铲物板7b1后,铲物板7b1和转筒7b4绕支杆7b3转动,使得铲物板7b1与触压式报警器7a抵接,触压,使得触压式报
警器7a响起,抓棉控制小车5则控制设备转动停机,然后抓棉控制小车5控制电动推杆7b2工作,电动推杆7b2推动支杆7b3向下运动,支杆7b3上的楔形块7b7这抵压滑杆7b6,使得滑杆7b6带动转筒7b4扭转,进而带动铲物板7b1向外侧转动,从而将异物铲出其运动轨道。
42.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。