1.本实用新型涉及模型加工技术领域,尤其是涉及一种轮子自动装配设备。
背景技术:
2.如今,汽车模型已成为了一种新的时尚,汽车模型在车身烤漆、发动机、变速箱、车轮、车灯、后视镜等的制作都跟真车相仿。目前在汽车模型的轮子组装中,由于轮子配件的装配大多是靠手工组装的,而手工组装加工效率低且劳动力有限,随着汽车模型的市场需求的增加,手工组装已不足以满足生产量的需求,而增加人工将耗费人工成本。
技术实现要素:
3.本实用新型的目的在于克服现有技术的缺点与不足,提供一种轮子自动装配设备,其结构设计巧妙,能够实现自动装配轮子配件,提高加工效率和加工量,降低人工成本。
4.本实用新型是通过以下技术方案实现的:一种轮子自动装配设备,其特征在于:包括入轮单元,所述入轮单元包括轮芯定位夹具、放芯装置和第一压芯装置,其中,所述放芯装置包括放芯顶杆和放芯动力源,所述放芯动力源驱动所述放芯顶杆移动;所述第一压芯装置包括第一压芯杆和第一压芯动力源,所述第一压芯动力源驱动所述第一压芯杆移动;所述轮芯定位夹具夹持轮芯,所述放芯顶杆将所述轮芯定位夹具夹持的轮芯的部分压入至所述轮胎中;所述第一压芯杆将所述轮芯的剩余部分压入轮胎中。
5.相对于现有技术,本实用新型提供一种轮子自动装配设备,通过机械结构模拟手工组装中将轮芯放入轮胎并压紧的过程,实现了轮子的轮芯和轮胎的自动安装,可替代人工的手工组装从而降低人工成本。且由于轮芯和轮胎的安装分工为放芯和压芯两个独立的加工程序,在执行放芯加工时可以同步执行压芯加工,使轮子装配加工效率更高。
6.进一步地,还包括打轴单元,所述打轴单元包括车轴定位装置和压轴装置;所述压轴装置包括压轴杆和压轴动力源,所述压轴动力源驱动所述压轴杆移动,所述车轴定位装置夹持车轴,所述压轴杆将所述车轴定位装置夹持的车轴压入所述轮芯。通过该方案,实现了轮子的轮芯和车轴的自动组装。
7.进一步地,所述打轴单元还包括顶轴装置,所述顶轴装置包括顶轴杆和顶轴动力源,所述顶轴杆的端部与所述压轴杆的端部相对,所述顶轴动力源驱动所述顶轴杆移动,所述压轴杆将所述车轴压入所述轮芯时所述车轴与所述顶轴杆的端部相抵。通过该方案,防止了车轴压入轮芯时超出安装位置,提高了加工质量。
8.进一步地,所述打轴单元还包括设置在所述第一压芯装置和所述压轴装置之间的轮子反转装置,所述轮子反转装置包括轮子抓取部、反转动力源和轮子抓取动力源,所述反转动力源驱动所述轮子抓取部垂直转动;所述轮子抓取动力源驱动所述轮子抓取部移动,轮子位于所述轮子抓取部的移动范围内。通过该方案,实现了需要反面安装车轴的轮子的自动反转。
9.进一步地,所述打轴单元还包括第二压芯装置,所述第二压芯装置包括第二压芯
杆和第二压芯动力源,所述第二压芯动力源驱动所述第二压芯杆移动,所述第二压芯杆对所述轮子反转装置反转后的轮子中的轮芯再次按压。通过该方案,防止了需要反面安装车轴的轮子的自动反转后轮芯从轮胎中移位,提高了加工质量。
10.进一步地,还包括次品检测单元,所述次品检测单元包括次品检测模块、轮子抓取部、轮子抓取动力源和次品移除动力源,所述轮子抓取动力源和所述次品移除动力源驱动所述轮子抓取部移动,所述次品检测模块检测压入所述轮子中的轮芯的位置,所述次品检测模块所检测的轮子位于所述轮子抓取部的移动范围内。通过该方案,检测完成轮芯和轮胎安装后轮芯是否正确位于设定的轮胎中的位置,并将未正确安装的轮子移除,提高了加工质量。
11.进一步地,还包括回转装置和配件台,所述回转装置驱动所述配件台转动;所述配件台上设有多个配件工位,所述配件工位设有用于放置配件夹具的配件夹具槽,所述配件夹具装夹所述轮胎或轮芯或轮子;所述放芯顶杆将所述轮芯压入所述配件工位上的轮胎,所述第一压芯杆将所述配件工位上的轮子中的轮芯的剩余部分压入所述轮胎,所述次品检测模块检测所述配件工位上的轮子,所述轮子反转装置反转所述配件工位上的轮子,所述第二压芯杆对所述配件工位上的轮子中的轮芯再次按压,所述压轴杆将车轴压入所述配件工位上的轮芯。通过该方案,实现了轮子在各加工工位间的自动流转,进一步实现自动化。
12.进一步地,还包括多个承力模块,所述承力模块包括轴承和支撑所述轴承的固定块,所述轴承的轴向与所述配件台的转动方向垂直并与所述配件台底面接触。通过该方案,防止了压芯和打轴过程中对配件台产生的压力使配件台受损。
13.进一步地,还包括下料单元和清理单元,所述下料单元包括下料抓取部、第一下料动力源和第二下料动力源,所述第一下料动力源和所述第二下料动力源驱动所述下料抓取部移动,所述下料抓取部夹持所述配件工位上的轮子,并将所述轮子搬离所述配件工位;所述清理单元包括顶出杆和轮子顶出动力源,所述顶出杆位于所述配件台下方,所述轮子顶出动力源驱动所述顶出杆移动,所述顶出杆的移动路径穿过所述配件夹具槽。通过该方案,实现了将完成装配的轮子搬离配件台,进一步实现了自动化,且防止了错过下料的轮子再次进入加工程序导致设备损坏。
14.进一步地,所述入轮单元还包括轮胎供料装置和轮胎搬料装置,所述轮胎供料装置包括轮胎振动盘、轮胎振动输送槽、第一检测模块和第二检测模块,所述轮胎振动盘发生振动将所述轮胎传输至所述轮胎振动输送槽,所述轮胎振动输送槽发生振动将所述轮胎从入料端传输至出料端,所述第一检测模块检测所述轮胎振动输送槽中是否有料,所述第二检测模块检测所述轮胎振动输送槽的出料端是否有料;所述轮胎搬料装置包括轮胎抓取部、第一搬料动力源和第二搬料动力源,所述第一搬料动力源和第二搬料动力源驱动所述轮胎抓取部移动,所述轮胎抓取部夹持的轮胎的移动路径经过所述轮胎振动槽的出料端和所述配件工位;和/或所述入轮单元还包括轮芯供料装置和轮芯搬料装置,所述轮芯供料装置包括轮芯振动盘、轮芯振动输送槽、第三检测模块和第四检测模块,所述轮芯振动盘发生振动将所述轮芯传输至所述轮芯振动输送槽,所述轮芯振动输送槽发生振动将所述轮芯从入料端传输至出料端,所述第三检测模块检测所述轮芯振动输送槽中是否有料,所述第四检测模块检测所述轮芯振动输送槽的出料端是否有料;所述轮芯搬料装置包括轮芯抓取部、第三搬料动力源和第四搬料动力源,所述第三搬料动力源和第四搬料动力源驱动所述
轮胎抓取部移动,所述轮芯抓取部夹持的轮芯的移动路径经过所述轮芯振动槽的出料端和所述轮芯定位夹具;和/或所述打轴单元还包括车轴供料装置和车轴搬料装置,所述车轴供料装置包括车轴振动盘、车轴振动输送槽、第五检测模块和第六检测模块,所述车轴振动盘发生振动将所述车轴传输至所述车轴振动输送槽,所述车轴振动输送槽发生振动将所述车轴从入料端传输至出料端,所述第五检测模块检测所述车轴振动输送槽中是否有料,所述第六检测模块检测所述车轴振动输送槽的出料端是否有料;所述车轴搬料装置包括车轴夹具和车轴搬料动力源,所述车轴夹具设有车轴夹孔;所述车轴搬料动力源驱动所述车轴夹具转动,所述车轴夹孔夹持的车轴的移动路径经过所述车轴振动输送槽的出料端;所述车轴定位装置包括车轴定位抓取部、第一定位动力源和第二定位动力源,所述第一定位动力源和所述第二定位动力源驱动所述车轴定位抓取部移动,所述车轴定位抓取部夹持所述车轴夹孔中的车轴。通过该方案,实现了轮胎、轮芯和车轴的自动供料,进一步实现自动化。
附图说明
15.图1为轮子的结构示意图。
16.图2为实施例中轮子自动装配设备的结构示意图。
17.图3为实施例中轮子自动装配设备的装配台和入轮单元结构示意图。
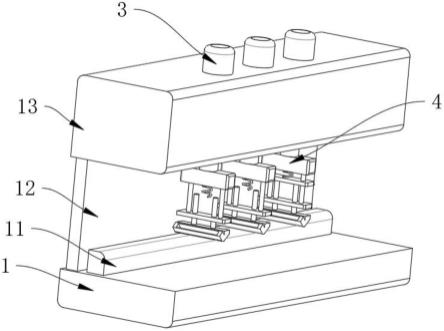
18.图4为实施例中轮子自动装配设备的次品检测单元和打轴单元的结构示意图。
19.图5为实施例中轮子自动装配设备的打轴单元的结构示意图。
20.图6为实施例中轮子自动装配设备的下料单元和清理单元的结构示意图。
21.下面结合附图,对本实用新型的技术方案进行详细的描述。
具体实施方式
22.请参阅图1,其为轮子的结构示意图,轮子配件包括轮胎a、轮芯b和车轴c,轮子配件的装配包括入轮和打轴两道工序,入轮即将轮芯b的o面朝外装入轮胎a的轮芯槽中,打轴即将车轴c装入轮芯b的i面的车轴孔。
23.请参阅图2,其为本实用新型的轮子自动装配设备示意图。该轮子自动装配设备包括装配台10、入轮单元20、次品检测单元30、打轴单元40、下料单元50、清理单元60和电控单元70,其中装配台10可以自动回转以实现装配流水线的传输;入轮单元20将轮子的轮芯装入轮胎中;次品检测单元30检测所述入轮单元20是否将轮芯准确装入轮胎的轮胎槽中,当检测到轮芯未准确装入轮胎时将该轮子移除;打轴单元40将经过所述次品检测单元30检测的轮芯准确装入轮胎的轮子安装车轴;下料单元50将所述入轮单元20或所述打轴单元40安装完成的轮子搬离装配台10;清理单元60将经过所述下料单元50而未被搬离的轮子清除出装配台10;所述电控单元70控制所述装配台10、入轮单元20、次品检测单元30、打轴单元40、下料单元50和清理单元60工作。
24.具体地,请参阅图3,其为实施例中轮子自动装配设备的装配台和入轮单元结构示意图。所述装配台10包括装置台11、配件台12、回转装置13和承力模块14,其中,装置台11用于放置所述入轮单元20、次品检测单元30、打轴单元40、下料单元50、清理单元60中的装配装置。配件台12与所述装置台11平行同轴设置,所述配件台12设有多个沿所述装置台11外围设置的配件工位121,每一配件工位121上设有用于放置配件夹具的配件夹具槽,配件夹
具用于固定配件,可根据不同尺寸的配件更换不同的配件夹具。所述回转装置13使所述配件台12与所述装置台11同轴相对转动,在本实施例中,所述回转装置13为一凸轮分割器,凸轮分割器通过不动法兰连接于所述装置台11轴心使所述装置台11固定;凸轮分割器同时通过动法兰连接于所述配件台12轴心,并通过电控单元70控制一马达驱动所述配件台12相对于所述装置台11同轴转动。在本实施例中,配件台12转动时每一配件工位121将循环经过七个装配工位,为便于说明以下将装配工位分别命名为第一工位、第二工位、第三工位、第四工位、第五工位、第六工位和第七工位。承力模块14包括一轴承和支撑轴承的固定块,所述轴承的轴向与配件台12的转动方向垂直并与配件台12底面接触,以抵住入轮打轴过程中配件台12所承受的压力,在本实施例中,所述承力模块14设置为3个且等间隔设置在配件台12下方。
25.请再次参阅图2和图3,所述入轮单元20包括轮胎供料装置21、轮胎搬料装置22、轮芯供料装置23、轮芯搬料装置24、轮芯定位夹具25、放芯装置26和第一压芯装置27,其中轮胎供料装置21实现轮胎配件的逐个供给;轮胎搬料装置22将所述轮胎供料装置21供给的轮胎逐个传输至所述配件工位121的配件夹具上;所述轮芯供料装置23实现轮芯配件的逐个供给;轮芯搬料装置24将所述轮芯供料装置23供给的轮芯逐个传输至所述轮芯定位夹具25上;放芯装置26将固定于所述轮芯定位夹具25上的轮芯配件放入配件工位121上的轮胎配件中;第一压芯装置27将已放入轮胎的轮芯进一步按压以使轮芯准确装配在轮胎的轮芯槽中。
26.更具体地,所述轮胎供料装置21包括轮胎振动盘211、轮胎振动输送槽212、第一检测模块(图未示)和第二检测模块(图未示),其中,所述轮胎振动盘211是一可振动的带有螺旋轨道的料斗,通过振动使轮胎自动有序排列沿螺旋轨道向上移动至螺旋轨道末端。所述轮胎振动输送槽212包括一输送槽和使输送槽振动的振动机,通过振动使轮胎从输送槽的入料端输送到输送槽的出料端,所述轮胎振动输送槽212的入料端与所述轮胎振动盘211的螺旋轨道末端对接。所述第一检测模块通过感应器检测所述轮胎振动输送槽212中是否有料并发送有无料信息至电控单元70,当检测得无料时电控单元70控制轮胎振动盘211发生振动,从而使轮胎有序传送至轮胎振动输送槽212;当检测得有料时,电控单元70控制所述轮胎振动盘211停止振动。具体实施中,第一检测模块可选设置在所述轮胎振动输送槽212的入料端或中段位置。所述第二检测模块设置在所述轮胎振动输送槽212的出料端,通过感应器检测所述轮胎振动输送槽212的出料端是否有料并发送有无料信息至电控单元70,当检测到轮胎振动输送槽212的出料端无料时,电控单元70控制轮胎振动输送槽212开始振动;当检测到轮胎振动输送槽212的出料端有料时,电控单元70控制轮胎振动输送槽212停止振动。
27.轮胎搬料装置22包括受所述电控单元70控制的轮胎抓取部221、第一搬料动力源222和第二搬料动力源223,其中,所述轮胎抓取部221用于抓取轮胎配件,所述轮胎抓取部221可选用手指气缸。所述第一搬料动力源222驱动所述轮胎抓取部221竖直上下移动,所述第二搬料动力源223驱动所述第一搬料动力源222水平移动,以使轮胎抓取部221在所述轮胎振动输送槽212的出料端上方和第一工位上方之间水平移动,从而当配件工位121位于第一工位时可将轮胎从轮胎振动输送槽212的出料端移动至配件工位121。
28.轮芯供料装置23包括轮芯振动盘231、轮芯检测模块232、吹气装置233、轮芯振动
输送槽234、第三检测模块(图未示)和第四检测模块(图未示),其中,所述轮芯振动盘231是一可振动的带有螺旋轨道的料斗,通过振动使轮芯自动有序排列沿螺旋轨道向上移动至螺旋轨道末端。轮芯振动盘231传送轮芯时轮芯检测模块232检测轮芯朝上的面是否为o面,通过一设置在轮芯振动盘231的螺旋轨道上方的摄像头拍摄处于螺旋轨道上的轮芯,通过视觉识别技术判断摄像头所拍摄的轮芯图像为轮芯i面或o面,当轮芯图像为轮芯i面时将发送信号使所述吹气装置233工作。所述吹气装置233的气孔正对所述轮芯检测模块232检测轮芯的螺旋轨道,当轮芯图像为轮芯i面时,吹气装置233将该轮芯吹离螺旋轨道。轮芯振动输送槽234包括一输送槽和使输送槽振动的振动机,通过振动使轮芯从输送槽的入料端输送到输送槽的出料端,所述轮芯振动输送槽234的入料端与所述轮芯振动盘231的螺旋轨道末端对接。所述第三检测模块通过感应器检测所述轮芯振动输送槽234中是否有料并发送有无料信息至电控单元70,当检测得无料时电控单元70控制轮芯振动盘231发生振动,从而使轮芯有序传送至轮芯振动输送槽234;当检测得有料时,电控单元70控制所述轮芯振动盘231停止振动。具体实施中,第三检测模块可选设置在所述轮芯振动输送槽234的入料端或中段位置。所述第四检测模块设置在所述轮芯振动输送槽234的出料端,通过感应器检测所述轮芯振动输送槽234的出料端是否有料并发送有无料信息至电控单元70,当检测到轮芯振动输送槽234的出料端无料时,电控单元70控制轮芯振动输送槽234开始振动;当检测到轮芯振动输送槽234的出料端有料时,电控单元70控制轮芯振动输送槽234停止振动。
29.轮芯搬料装置24包括受所述电控单元70控制的轮芯抓取部241、第三搬料动力源242和第四搬料动力源243,其中,轮芯抓取部241用于抓取轮芯,轮芯抓取部241可选用手指气缸。第三搬料动力源242驱动所述轮芯抓取部241竖直上下移动,第四搬料动力源243驱动所述第三搬料动力源242水平移动,以使轮芯抓取部241在所述轮芯振动输送槽234的出料端上方和第二工位上方之间水平移动,从而当配件工位121位于第二工位时可将轮芯从轮芯振动输送槽234的出料端移动至配件工位121上方。
30.轮芯定位夹具25固定在所述装置台11上,且正对于第二工位上方的位置,以夹持轮芯抓取部241所传输的轮芯并将该轮芯定位在第二工位上方。在具体实施中,轮芯定位夹具25可选用手指气缸。
31.放芯装置26包括放芯顶杆261和放芯动力源262,其中,放芯顶杆261的端部正对于第二工位;放芯动力源262驱动所述放芯顶杆261在轮芯定位夹具25上方和第二工位上方之间竖直上下移动,放芯顶杆261下移时将轮芯定位夹具25夹持的轮芯压入位于第二工位的配件工位121上的轮胎中。
32.第一压芯装置27包括第一压芯杆271和第一压芯动力源272,其中,第一压芯杆271的端部正对于第三工位;第一压芯动力源272驱动所述第一压芯杆271在第三工位上方竖直上下移动,下移时将位于第三工位的配件工位121上轮胎中的轮芯再次按压以使轮芯准确压入轮胎的轮胎槽中。
33.请参阅图4,其为实施例中轮子自动装配设备的次品检测单元和打轴单元的结构示意图。所述次品检测单元30包括次品检测模块31、轮子抓取部32、轮子抓取动力源34、次品移除滑轨35、次品移除动力源36和次品盒37,其中,次品检测模块31固定于所述装置台11上,检测位于第四工位的配件工位121上置于轮胎中的轮芯的高度,以判断该轮芯是否完全压入轮胎的轮芯槽中并将检测信息发送至电控单元70,在本实施例中,所述次品检测模块
31可选用红外传感器。轮子抓取部32用于抓取轮子,轮子抓取部32可选用手指气缸。轮子抓取动力源34驱动所述轮子抓取部32竖直上下移动,次品移除动力源36驱动所述轮子抓取动力源34在所述次品移除滑轨35上水平移动,以使所述轮子抓取部32在第四工位的上方和次品盒37的上方之间水平移动,从而可将检测为次品的轮子从配件工位121上移动至次品盒37中。
34.请再次参阅图4,以及同时参阅图5,其为实施例中轮子自动装配设备的打轴单元的结构示意图。所述打轴单元40包括轮子反转装置41、第二压芯装置42、车轴供料装置43、车轴搬料装置44、车轴定位装置45、压轴装置46和顶轴装置47,其中,轮子反转装置41使已完成入轮的轮子反转180
°
以使轮芯的i面朝上;第二压芯装置42对所述轮子反转装置41反转后的轮子再次进行压芯,以保证轮芯准确安置在轮胎的轮芯槽中;车轴供料装置43实现车轴的逐个供给;车轴搬料装置44将所述车轴供料装置43供给的车轴逐个搬运至车轴定位装置45;压轴装置46将所述车轴定位装置45上定位的车轴压入轮芯的车轴孔中;顶轴装置47用于防止所述压轴装置46压轴时使车轴穿出轮芯的o面。
35.更具体地,轮子反转装置41包括轮子抓取部32、轮子抓取动力源34和反转动力源411。在本实施例中,轮子反转装置41与所述次品检测单元30共用同一轮子抓取部32和轮子抓取动力源34。所述反转动力源411设置在所述轮子抓取部32和轮子抓取动力源34之间,所述反转动力源411驱动所述轮子抓取部32垂直旋转180
°
。
36.第二压芯装置42包括第二压芯杆421和第二压芯动力源422,其中,第二压芯杆421的端部正对于第四工位。第二压芯动力源422驱动所述第二压芯杆421于第四工位上方竖直上下移动,下移时将位于第四工位的配件工位121上的轮子进行再次压芯。
37.车轴供料装置43包括车轴振动盘431、车轴振动输送槽432、第五检测模块(图未示)和第六检测模块(图未示),其中,所述车轴振动盘431是一可振动的带有螺旋轨道的料斗,通过振动使车轴自动有序排列沿螺旋轨道向上移动至螺旋轨道末端。所述车轴振动输送槽432包括一输送槽和使输送槽振动的振动机,通过振动使车轴从输送槽的入料端输送到输送槽的出料端,所述车轴振动输送槽432的入料端与所述车轴振动盘431的螺旋轨道末端对接。所述第五检测模块通过感应器检测所述车轴振动输送槽432中是否有料并发送有无料信息至电控单元70,当检测得无料时电控单元70控制车轴振动盘431开始振动;当检测得有料时,电控单元70控制所述车轴振动盘431停止振动。具体实施中,第五检测模块可选设置在所述车轴振动输送槽432的入料端或中段位置。第六检测模块设置在所述车轴振动输送槽432的出料端,通过感应器检测所述车轴振动输送槽432的出料端是否有料并发送有无料信息至电控单元70,当检测到车轴振动输送槽432的出料端无料时,电控单元70控制车轴振动输送槽432开始振动;当检测到车轴振动输送槽432的出料端有料时,电控单元70控制车轴振动输送槽432停止振动。
38.车轴搬料装置44包括车轴夹具441和车轴搬料动力源442,其中,车轴夹具441上设有一用于夹持车轴的车轴夹孔;车轴搬料动力源442驱动所述车轴夹具441在所述车轴夹孔对准所述车轴振动输送槽432出料端的方向和所述车轴夹孔竖直朝上的方向之间转动。
39.车轴定位装置45包括车轴定位抓取部451、第一定位动力源452、滑轨453和第二定位动力源454,其中,车轴定位抓取部451用于抓取车轴,在具体实施中可选用手指气缸。第一定位动力源452驱动所述车轴定位抓取部451竖直上下移动,第二定位动力源454驱动所
述第一定位动力源452在所述滑轨453上水平移动,以使所述车轴定位抓取部451在所述车轴夹具441上方和第五工位上方之间水平移动,从而可将车轴从车轴夹具441移动至第五工位并定位于第五工位上方。
40.压轴装置46包括压轴杆461和压轴动力源462,其中,压轴杆461的端部正对于第五工位;压轴动力源462驱动所述压轴杆461于所述车轴定位抓取部451上方竖直上下移动,压轴杆461下移时将车轴定位抓取部451上的车轴压入位于第五工位的配件工位121的轮芯中。
41.顶轴装置47包括顶轴杆471和顶轴动力源472,其中,顶轴杆471的端部正对于所述压轴杆161并设置在配件台12下方;顶轴动力源472驱动所述顶轴杆471竖直上下移动,所述顶轴杆471上移时顶轴杆471的端部穿过配件工位121的配件夹具槽与配件夹具上的轮芯接触。
42.请参阅图6,其为实施例中轮子自动装配设备的下料单元和清理单元的结构示意图。所述下料单元50包括下料抓取部51、第一下料动力源52、第二下料动力源53和下料滑槽54,其中,下料抓取部51用于抓取完成加工的轮子,在具体实施中可选用手指气缸。第一下料动力源52驱动所述下料抓取部51竖直上下移动。第二下料动力源53驱动所述第一下料动力源52水平移动,以使所述下料抓取部51在第六工位的上方和下料滑槽54的上方之间水平移动,从而可将位于第六工位的配件工位121上的轮子移动至下料滑槽54。
43.所述清理单元60包括顶出杆61和顶出动力源62,其中,顶出杆61的端部正对于第七工位并设置在配件台12下方;顶出动力源62驱动所述顶出杆61竖直上下移动,所述顶出杆61上移时穿过位于第七工位的配件工位121的配件夹具槽,从而将该配件工位121上的轮子顶出配件夹具槽。
44.所述电控单元70包括处理模块和操作模块,处理模块控制所述入轮单元20、次品检测单元30、打轴单元40、下料单元50和清理单元60工作;操作模块接收外部操作指令并发送至处理模块。在具体实施中,所述处理模块可以为微型电脑、微型处理器等可以实现电气控制的器件,操作模块可以为电子触摸屏、键盘、电子按钮等可以实现外部指令传输的器件。
45.在具体实施中,所述第一搬料动力源222、第二搬料动力源223、第三搬料动力源242、第四搬料动力源243、放芯动力源262、第一压芯动力源272、轮子抓取动力源34、次品移除动力源36、第二压芯动力源422、第一定位动力源452、第二定位动力源454、压轴动力源462、顶轴动力源472、第一下料动力源52、第二下料动力源53和轮子顶出动力源62可选用直线驱动气缸等可驱动物体直线运动的动力装置;反转动力源411、车轴搬料动力源442可选用旋转气缸等可驱动物体旋转的动力装置。
46.本实用新型对轮子的加工将依序经过入轮单元20执行入轮工序、次品检测单元30执行次品检测工序、打轴单元40执行打轴工序。首先,在入轮工序中,当第二检测模块检测轮胎振动输送槽212的出料端有料并且第一工位停有配件工位121时,电控单元70控制轮胎搬料装置22的第一搬料动力源222和第二搬料动力源223驱动轮胎抓取部221移动至轮胎振动输送槽212的出料端并抓取一轮胎,然后将轮胎移动至位于第一工位的配件工位121上的配件夹具上;紧接着,电控单元70控制回转装置13使该配件工位121转动到第二工位;此时,若轮芯供料装置23的第四检测模块检测得轮芯振动输送槽234的出料端有料时,电控单元
70将控制轮芯搬料装置24的第三搬料动力源242和第四搬料动力源243驱动轮芯抓取部241移动至轮芯振动输送槽234的出料端并抓取一轮芯,然后将该轮芯移动至轮芯定位夹具25上;随后控制轮芯定位夹具25夹持该轮芯,使轮芯定位在第二工位上方;紧接着,电控单元70控制放芯装置26的放芯动力源262驱动放芯顶杆261竖直向下移动,将轮芯定位夹具25夹持的轮芯压入位于第二工位的配件工位121上的轮胎中;然后电控单元70控制该配件工位121转动至第三工位;紧接着,电控单元70控制第一压芯动力源272驱动第一压芯杆271竖直向下移动,将位于第三工位的配件工位121上的轮芯压紧在轮胎中。此时,已完成轮子的入轮工序,接着电控单元70将放置有完成入轮的轮子的配件工位121转动至第四工位。
47.在次品检测工序中,次品检测模块31对位于第四工位的配件工位121上的轮胎中的轮芯位置进行高度检测,当检测得高度不在标准高度范围内时,电控单元70控制轮子抓取动力源34驱动轮子抓取部32移动至该配件工位121并抓取轮子,然后控制次品移除动力源36驱动轮子抓取部32将轮子移动至次品盒37上方并放下;当检测得高度在标准高度范围内时,则进入打轴单元40执行的打轴工序。
48.在打轴工序中,电控单元70控制轮子抓取动力源34驱动轮子抓取部32移动至位于第四工位的配件工位121并抓取轮子,然后控制轮子反转装置41的反转动力源411驱动轮子抓取部32垂直反转180
°
从而使轮子的轮芯i面朝上,随后将轮子放回配件工位121上;紧接着,电控单元70控制第二压芯装置42的第二压芯动力源422驱动第二压芯杆421竖直向下移动,对位于第五工位的配件工位121上的轮胎和轮芯再次压紧;然后电控单元70控制该配件工位121转动至第五工位;与此同时,若车轴供料装置43的第六检测模块检测得车轴振动输送槽432的出料端有料,电控单元70控制车轴搬料装置44的车轴搬料动力源442驱动车轴夹具441使其车轴夹孔转向车轴振动输送槽432出料端,以使车轴插入车轴夹孔,随后再次驱动车轴夹具441使其车轴夹孔中的车轴转向竖直上方;紧接着,电控单元70控制车轴定位装置45的第一定位动力源452和第二定位动力源454驱动车轴定位抓取部451移动至车轴夹具441抓取车轴,然后将车轴移动至第五工位上方和压轴杆461之间;紧接着,电控单元70控制压轴动力源462驱动压轴杆461竖直向下移动,从而将车轴压入位于第五工位的配件工位121上的轮芯的轮芯孔中;在压轴杆461下压的同时,电控单元70控制顶轴装置47的顶轴动力源472驱动顶轴杆向上移动,抵住位于第五工位的配件工位121上的轮芯。此时,已完成轮子的入轴工序,接着电控单元70控制完成入轴的轮子所在的配件工位121转动至第六工位。
49.当配件工位121位于第六工位时,电控单元70控制下料单元50的第一下料动力源52和第二下料动力源53驱动下料抓取部51移动至配件工位121上方并抓取轮子,然后将轮子移动至下料滑槽54上方放下。
50.之后,电控单元70控制位于第六工位的配件工位121转动至第七工位,随后电控单元70控制清理单元60的顶出动力源62驱动顶出杆61竖直向上移动将位于第七工位的配件工位121上的轮子顶出配件工位121,以防止未下料的轮子再次进入其他装配工位而损坏设备。
51.相对于现有技术,本实用新型设置的放芯装置26和第一压芯装置27配合实现了玩具模型的轮子的自动入轮加工;经过次品检测单元30的轮芯高度的检测可筛选出入轮时轮芯未压紧的次品,提高了自动入轮加工的轮子质量;通过轮子反转装置41、车轴定位装置45和压轴装置46的配合实现了轮子的自动打轴加工;设置的第二压芯装置42对反转后的轮子
进行再次压芯,进一步提高了自动打轴加工的轮子的质量;整体上,本实用新型实现了玩具模型的轮子的轮胎、轮芯和车轴配件的全自动装配,提高了轮子加工的效率且加工质量高。
52.本实用新型并不局限于上述实施方式,如果对本实用新型的各种改动或变形不脱离本实用新型的精神和范围,倘若这些改动和变形属于本实用新型的权利要求和等同技术范围之内,则本实用新型也意图包含这些改动和变形。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。