1.本发明涉及自动化技术领域,具体为一种管件打磨用末端执行器及机械臂。
背景技术:
2.机器人末端执行器是指任何一个连接在机器人边缘具有一定功能的工具。末端执行器包括机器人工具快换装置,机器人碰撞传感器,机器人旋转连接器,机器人压力工具,机器人打磨工具或机器人喷涂枪等等。
3.在管件打磨中,存在两种打磨方式,第一种为工件固定,打磨工具转动,大多适用于对管件内壁的打磨,打磨头尺寸与管件内壁适配,打磨头自转时,对工件内壁进行打磨;第二种为工件转动,打磨工具固定,一般适用于对管件外壁的打磨,打磨头与管件外壁相切,随着管件的转动,打磨头对管件外壁进行打磨,当然,也有部分改进设计,采用不同的打磨头对管件外壁进行打磨,如公告号为cn214869171u的中国专利公开的一种金属管件表面打磨装置,包括打磨筒和夹紧固定机构,夹紧固定机构用于夹持金属管件,夹持固定机构与一电机连接,在电机驱动下,金属管件可进行自转,打磨筒固定在电动伸缩柱上,随着电动伸缩柱的伸缩可沿着金属管件的轴向往复移动,随着金属转件的转动,打磨筒对金属管件的外壁进行打磨。
4.现有的打磨方式均只能对管件的外壁或内壁进行打磨,不能同时适用管件内壁和外壁的打磨,对于需内外壁打磨的管件,需要在两台设备上分工序打磨,且在打磨不同尺寸的管件时,打磨工具的型号还需要不断更换,存在设备成本高、生产效率低的问题。
技术实现要素:
5.针对现有的打磨工具存在成本高且生产效率低的问题,本发明的第一目的是提供一种适用性广且能够提高生产效率的管件打磨用末端执行器。
6.为了解决上述技术问题,本发明提供如下技术方案:一种管件打磨用末端执行器,包括安装盘、转动设置于安装盘上的打磨部以及固定于安装盘上的第一电机,打磨部包括由第一电机驱动进行自转的转动座、于转动座远离安装盘的一侧凹陷的导槽以及沿着导槽导向移动的导块,在导块远离安装盘的一侧固定有延伸出转动座的打磨头,导块的移动受控于一驱动机构,驱动机构包括于导槽内穿过导块且两端与导槽两端转动连接的丝杆,导块上固定有与丝杆配合的螺母,在安装盘上固定有用于驱动丝杆转动的第二电机,在转动座靠近第二电机的一端设置有可驱使丝杆在锁止和转动之间切换的切换机构,切换机构包括于丝杆靠近第二电机的一端弹性伸缩设置的伸缩块,在转动座靠近第二电机的一端凹陷有限位槽,于伸缩块靠近转动座的一端凸设有在伸缩块回缩时可插入限位槽内的限位块,在限位槽和限位块之间设置有驱使伸缩块伸缩的电磁吸附机构,第二电机的电机轴端部固定的非圆插块,伸缩块靠近第二电机的一端凹陷的在伸缩块伸出时供非圆插块插入的非圆插槽。
7.根据上述方案,本末端执行器包括安装盘以及转动在其上的打磨部,打磨部包括
打磨头,打磨头固定在导块上,导块随着丝杆的转动能够沿着丝杆的轴向往复移动,实现打磨头与转动座转动中心之间间距的调节,当转动座转动时,打磨头绕转动座的转动中心周转对管件的内环壁或外环壁进行打磨,当需要对不同管径管件的内壁和外壁进行打磨时,只需利用第二电机驱动丝杆转动来调节打磨头与转动座转动中心之间的间距即可,当打磨头打磨管件时,需要确保丝杆处于静止的状态,才能保证打磨精度,而本方明中的切换机构就能实现丝杆在转动或锁止之间的切换,切换机构包括伸缩块和电磁吸附机构,电磁吸附机构随着磁性的有无实现对伸缩块的吸附或解吸,电磁吸附机构存在磁性时,伸缩块处于回缩状态且伸缩块上的限位块与限位槽插接配合,丝杆锁止于转动座上;电磁吸附机构无磁时,伸缩块自动弹出与第二电机轴弹性抵接或直接插接配合,若为弹性抵接状态时,随着第二电机的转动,第二电机的电机轴端部的非圆插块能够自动插入非圆插槽内,驱使丝杆随着第二电机的转动而转动,结构十分巧妙,该末端执行器无需更换打磨头就能够对不同管径的管件的内外壁先后进行连续打磨,适用性得到显著提升的同时,降低了设备造价,显著提高了生产效率。
8.进一步的,电磁吸附机构包括于限位槽内固定设置的电磁铁,伸缩块的伸出受控于一弹性件,限位块由可被磁体吸附的材质制成。
9.根据上述方案,电磁铁得电时,限位块受到电磁铁的吸附被吸入限位槽内,此时,伸缩块脱离第二电机的电机轴,限位块与限位槽的插接配合将丝杆锁止在转动座上,此时,打磨头无法沿着丝杆的轴向发生移动;电磁铁失电时,伸缩块在弹性件作用下处于伸出状态,限位块随伸缩块运动脱离限位槽,伸缩块伸出后与第二电机轴上的非圆插块插接配合,丝杆随着第二电机的电机轴的转动同步转动,实现打磨头沿丝杆轴向位置的变化。
10.进一步的,在丝杆靠近第二电机的一端凹陷有非圆滑槽,伸缩块包括可全部缩入非圆滑槽或局部伸出非圆滑槽的伸缩杆以及于伸缩杆远离丝杆的一端垂直固定的配合块,限位块固定于配合块靠近丝杆的一端。
11.根据上述方案,伸缩块只能沿着非圆滑槽的长度方向移动而无法发生转动,当配合块与转动座锁止后,丝杆无法相对配合块发生转动,丝杆相对转动座静止。
12.进一步的,弹性件为一弹簧,弹簧可设置于非圆滑槽内或套接于伸缩杆上,当弹簧设置于非圆滑槽内时,弹簧的两端分别与非圆滑槽底部和伸缩杆端部连接或弹性抵接;当弹簧套接于伸缩杆上时,弹簧的两端分别与转动座端部和配合块靠近转动座的一端弹性抵接。
13.根据上述方案,弹簧设置在非圆滑槽内或套接在伸缩杆上均能够实现配合块的弹性复位。
14.进一步的,限位槽与限位块一一对应且均绕丝杆的转动中心周向均匀间隔设置有若干个,至少一个限位槽底部固定有电磁铁。
15.根据上述方案,限位槽和限位块设置多个后,能够提高锁止精度。
16.进一步的,在转动座远离安装盘的一侧于导槽开口处沿导块移动方向设置有指示打磨头位置的指示刻度。
17.根据上述方案,指示刻度能够便有人为对焦或观察。
18.进一步的,导块设置有两块且可同步靠近或远离,每块导块上固定有一打磨头,两打磨头大小一致且平行设置,丝杆为双向丝杆,两导块分别位于双向丝杆旋向相反的两段
螺纹段上,双向丝杆的两螺纹段连接处对应指示刻度的“0”刻度。
19.根据上述方案,采用双向丝杆后,能够实现两个打磨头同步靠近或远离,在打磨管件时,能够提高打磨的均匀性和打磨效率。
20.进一步的,打磨头可拆卸设置于导块上,在导块远离安装盘的一端凸设有非圆插接段,在打磨头靠近导块的一端凹陷有可供非圆插接段插入的配合槽,在打磨头靠近导块的一端外壁上设置有穿过打磨头与非圆插接段固定的锁紧螺钉。
21.根据上述方案,打磨头可拆卸设置后,便于安装或更换,由于导块上非圆插接段的设置,能够中心定位打磨头并增加两者连接的强度。
22.进一步的,在转动座和安装盘之间设置有导向承重机构,导向承重机构包括于安装盘靠近转动座的一端以第一电机的电机轴为中心凹陷的导向环槽以及于转动座靠近安装盘的一端凸设的至少一个插入导向环槽的导向块。
23.根据上述方案,转动座通过导向块与安装盘上的导向环槽导向配合,确保转动座在转动中心不偏移的同时提高转动座与安装盘之间连接的牢固性。
24.本发明的第二目的是提供一种机械臂,其端部连接有上述的管件用末端执行器。
25.与现有技术相比,本发明所达到的有益效果是:
26.1、本末端执行器包括安装盘以及转动在其上的打磨部,打磨部包括打磨头,打磨头固定在导块上,导块随着丝杆的转动能够沿着丝杆的轴向往复移动,实现打磨头与转动座转动中心之间间距的调节,当转动座转动时,打磨头绕转动座的转动中心周转对管件的内环壁或外环壁进行打磨,当需要对不同管径管件的内壁和外壁进行打磨时,只需利用第二电机驱动丝杆转动来调节打磨头与转动座转动中心之间的间距即可,当打磨头打磨管件时,需要确保丝杆处于静止的状态,才能保证打磨精度,而本方明中的切换机构就能实现丝杆在转动或锁止之间的切换,切换机构包括伸缩块和电磁吸附机构,电磁吸附机构随着磁性的有无实现对伸缩块的吸附或解吸,电磁吸附机构存在磁性时,伸缩块处于回缩状态且伸缩块上的限位块与限位槽插接配合,丝杆锁止于转动座上;电磁吸附机构无磁时,伸缩块自动弹出与第二电机轴弹性抵接或直接插接配合,若为弹性抵接状态时,随着第二电机的转动,第二电机的电机轴端部的非圆插块能够自动插入到插槽内,驱使丝杆随着第二电机的转动而转动,结构十分巧妙,该末端执行器无需更换打磨头就能够对不同管径的管件的内外壁先后进行连续打磨,适用性得到显著提升的同时,降低了设备造价,显著提高了生产效率。
27.2、采用双向丝杆,在双向丝杆的两根螺纹段上分别设置导块,导块上各固定有一样的打磨头,打磨时,两个打磨头同时第一电机的转动中心周转,在打磨管件时,能够提高打磨的均匀性和打磨效率。
附图说明
28.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
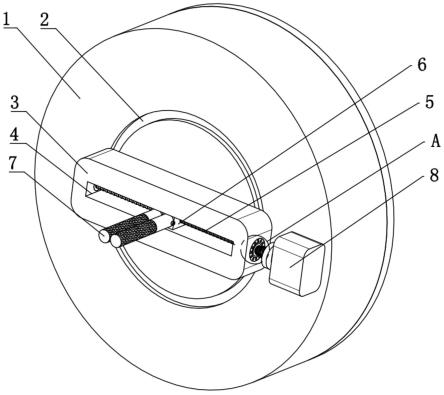
29.图1是本实施例的一种管件打磨用末端执行器的轴测图;
30.图2是图1的a的放大图;
31.图3是本实施例的一种管件打磨用末端执行器的主视图;
32.图4是图3的a-a的剖视图;
33.图5是图4的b的放大图;
34.图6是本实施例的一种管件打磨用末端执行器打磨管件内壁时的剖视图;
35.图7是本实施例的一种管件打磨用末端执行器打磨管件外壁时的剖视图。
36.图中:1、安装盘;2、导向环槽;3、转动座;301、转轴;302、导向块;4、导槽;5、丝杆;501、非圆滑槽;6、导块;7、打磨头;8、第二电机;9、伸缩块;901、伸缩杆;902、配合块;9021、非圆插槽;10、限位槽;11、限位块;12、弹簧;13、指示刻度;14、非圆插接段;15、锁紧螺钉;16、第一电机;17、安装块;18、非圆插块;19、电磁铁。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
38.实施例
39.一种具备管件打磨用末端执行器的机械臂,包括设置于机械臂端部的末端执行器,末端执行器参照图1-图5所示,包括安装盘1,安装盘1一侧凸设有一与机械臂铰接或固定连接的安装块17,安装盘1远离安装块17的一端设置有一打磨部,安装盘1内部中空且固定设置有第一电机16,打磨部包括转动座3,转动座3靠近安装盘1的一侧中心凸设有插入安装盘1内部且与第一电机16的电机轴端部固定连接的转轴301,转轴301和安装盘1之间通过轴承转动连接,转轴301与轴承内圈固定连接,安装盘1与轴承外圈固定连接,在转动座3远离安装盘1的一侧凹陷有一导槽4,导槽4的横截面非圆形,本实施例中,采用的为矩形,在导槽4内导向移动有一导块6,导块6的横截面为矩形,在导块6远离安装盘1的一侧固定有延伸出转动座3的打磨头7,本实施例的打磨头7采用的为柱状打磨头7,导块6的移动受控于一驱动机构,驱动机构包括于导槽4内穿过导块6且两端与导槽两端转动连接的丝杆5,导块6上固定有与丝杆5配合的螺母,丝杆5的转动受控于第二电机8。
40.转动座3在打磨时转动较快,将第二电机8设置在转动座3上随着转动座转动,设置难度大且对第二电机8伤害较大,故,本实施例中,将第二电机8固定在安装盘1上,并在转动座3靠近第二电机8的一端设置可驱使丝杆5在锁止和转动之间切换的切换机构,结合图2、图4和图5所示,切换机构能够实现与第二电机8电机轴之间的连接或断开,具体结构如下:包括于丝杆5靠近第二电机8的一端凹陷的非圆滑槽501以及伸缩块9,伸缩块9包括可全部缩入非圆滑槽501内或局部伸出非圆滑槽501外的伸缩杆901以及于伸缩杆901远离丝杆5的一端垂直固定的配合块902,伸缩杆901的横截面为非圆形,本实施例中采用的为矩形,伸缩杆901远离配合块902的一端设置有限位其滑出非圆滑槽501的限位凸块,配合块902和转动座3相对的一侧之间设置有插接限位机构,插接限位机构包括嵌设在转动座3上以丝杆5为中心的固定环以及于固定环上以丝杆5为中心周向均匀间隔设置的限位槽10,在配合块902靠近转动座3的一侧凸设有与限位槽10一一对应的限位块11,限位块11与限位槽10的插接或脱离受控于一电磁吸附机构。
41.电磁吸附机构包括于至少一个限位槽10内固定设置的电磁铁19,本实施例中,参照图5所示,电磁铁19包括主体以及于主体上凸设的插入至每个限位槽10内的吸附凸起,这样,只需一块电磁铁19即可,当然,每个吸附凸起独立设置也行,只需在控制时,将所有的吸
附凸起串联或并联在一个电路内即可,限位块11由可被磁体吸附的材质制成,本实施例中,限位块11由铁制成,伸缩块9在电磁铁19失电后的复位受控于一弹性件,该弹性件可采用弹簧12,弹簧12至少存在两种设置方式,一种是内置于非圆滑槽501内且两端分别与非圆滑槽501底部和限位凸块弹性抵接或固定连接;另一种是套接在伸缩杆901外且两端分别与配合块902靠近转动座3的一端和转动座3端部弹性抵接配合,本实施例采用的为后者。
42.在配合块902远离丝杆5的一端中心凹陷有非圆插槽9021,第二电机8的电机轴朝向丝杆5且端部固定有可插入非圆插槽9021内的非圆插块18,当电磁铁19失电时,伸缩块9伸出可驱使非圆插块18插入非圆插槽9021内,此时,丝杆5随着第二电机8的转动而转动;当电磁铁19得电时,伸缩块9回缩脱离第二电机8且伸缩块9上的限位块11插入转动座3上的限位槽10内,丝杆5锁止在转动座3上,电磁铁19的得电或失电受控于一控制电路,控制电路包括串联设置的电磁铁19和控制开关。
43.在转动座3远离安装盘1的一侧于导槽4开口处沿导块6移动方向设置有指示打磨头7位置的指示刻度13,参照图3所示,本实施例中,为了提高打磨效率,丝杆5采用的为双向丝杆5,双向丝杆包括两段旋向相反的螺纹段,两螺纹段上分别设置有一导块6,导块6上均设置有与螺纹段配合的螺母,每个导块6远离安装盘1的一侧均固定有一打磨头7,双向丝杆5的两螺纹段的连接处对应指示刻度13的“0”刻度,随着双向丝杆5的转动,两导块6可同时靠近或远离“0”刻度。
44.为了便于打磨头7的更换,打磨头7可拆卸设置于导块6上,参照图4所示,在导块6远离安装盘1的一端凸设有非圆插接段14,在打磨头7靠近导块6的一端凹陷有可供非圆插接段14插入的配合槽,在打磨头7山设置有与配合槽连通的通孔,在非圆插接段14上设置有螺纹孔,在打磨头7靠近导块6的一端外壁上设置有穿过通孔与螺纹孔紧配的锁紧螺钉15,非圆插接段14的横截面为正方形且设置在导块6中心,上述连接方式既方便打磨头7的更换,又能够保证打磨头7与导块6的连接强度。
45.为了保证转动座3的转动精度以及其与安装座之间连接的安全性,在转动座3和安装盘1之间设置有导向承重机构,结合图1和图4所示,导向承重机构包括于安装盘1靠近转动座3的一端以第一电机16的电机轴为中心凹陷的导向环槽2以及于转动座3靠近安装盘1的一端凸设的至少一个插入导向环槽2的导向块302,本实施中,导向块302设置有两块且对称设置于转轴301的两侧。
46.上述的第一电机16、第二电机8均为伺服电机或步进电机,在机械臂上设置有控制器和触控屏,控制器为plc,第一电机16、第二电机8、控制开关和触控屏均与控制器连接,通过触控屏可编辑程序,第一电机16、第二电机8的启闭和转速以及控制开关的启闭均由控制器现有的逻辑编程实现,在此不再赘述。
47.当目标管件固定在夹具上后,两个打磨头7之间的间距根据实际打磨部位(外壁和/或内壁)进行调整,以一个外径3cm、内径2.5cm且需要内外壁均打磨的管件为例,参照图6-图7所示,具体操作步骤如下:
48.1、第一电机16处于关闭状态,电磁铁19处于失电状态,伸缩块9伸出且与第二电机8端部的非圆插块18插接配合,第二电机8转动调整两个打磨头7相对的一侧之间的间距大于3cm后,机械臂移动至两个打磨头7套接在管件外壁后,反向转动第二电机8驱使打磨头7相对的一侧之间的间距调整至3cm,此时,打磨头7与管件外壁相切;
49.2、第二电机8关闭,电磁铁19得电,伸缩块9回缩驱使其上的限位块11与转动座3上的限位块11插接配合,两个打磨头7锁紧在转动座3上;
50.3、第一电机16启动,转动座3随第一电机16转动,两个打磨头7沿着管件外壁周转对管件外壁进行打磨;
51.4、管件外壁打磨完毕后,第一电机16关闭,电磁铁19再次失电,伸缩块9伸出与第二电机8端部的非圆插块18插接配合,若两者未实现插接,可驱动第二电机8转动直至其与伸缩块9插接配合,第二电机8转动至两打磨头7相对的一侧之间的间距再次大于3cm后,机械臂移动驱使打磨头7脱离管件;
52.5、第二电机8反向转动至两打磨头7相背的一侧之间的间距小于2.5cm后,机械臂移动驱使打磨头7插入到管件内壁,第二电机8正转至两打磨头7相背的一侧的间距为2.5cm,确保两个打磨头7同时与管件内壁相切;
53.6、第二电机8关闭,电磁铁19得电,伸缩块9回缩驱使其上的限位块11与转动座3上的限位块11插接配合,两个打磨头7锁紧在转动座3上;
54.7、第一电机16启动,转动座3随第一电机16转动,两个打磨头7沿着管件外壁周转对管件内壁进行打磨;
55.8、管件内壁打磨完毕后,第一电机16关闭,电磁铁19再次失电,伸缩块9伸出与第二电机8端部插接配合,第二电机转8动驱使两打磨头相背的一侧的间距小于2.5cm后,机械臂移动驱使打磨头7脱离管件;
56.以上就完成了一个管件外壁和内壁的连续自动打磨,若管件只需外壁或内壁打磨,可通过改变程序就能利用本机械臂进行操作,故,本管件打磨用末端执行器在适用性上得到了显著提升,并且由于可对管件的内外壁进行连续打磨,生产效率得到显著提升,本打磨工具结构巧妙但不繁琐,易于生产,且设备成本相交现有的一台单一功能设备而言相差不多,故,设备成本实际上有了明显的下降。
57.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。