1.本发明涉及一种基于自动送丝的自适应排线设备及方法,属于层绕机设备技术领域。
背景技术:
2.丝、线类材料(如焊丝等,以下简称线材)在生产、转运、销售、使用等过程中往往需要缠绕到回转体形状的载具上(如焊丝盘,以下简称载具)。比如,焊丝生产的下一工序即为将焊丝缠绕到工字盘上,这一过程通常在层绕机上进行。层绕机通过对线材的多层有序堆叠,实现高质量的线材的生产。并且,层绕机在旋转载具以层绕线材时,需要控制线材沿载具转轴方向上的运动,以确保缠绕到工字盘上的每一层的焊丝之间紧密排列,从而确保不出现层间的堆叠错误,以保证最终的制品质量,这一过程称为排线。因此,排线对于层绕机的性能、品质十分重要。
3.此外,在层绕机的每个空载具开始绕线时,需要将线材与载具固连,一般的做法是将线材的自由端(或前端)送入载具上的开孔中并在头部折弯以勾住载具,从而当载具旋转时,线材才能够缠绕在载具上,将线材的前端送入载具中的过程称为送丝。
4.进一步,研究人员提出了一些自动化排线的方案,其中一种是在层绕第一层时,通过专用的装置在层绕时给线材施加一个沿载具回转轴向的力,使第一层排线紧密;第二层及以后则通过线材排列时形成的沟槽自动叠加排列;另一种是使即将缠绕到工字盘上的焊丝在层绕时产生一个负角,即通过即将缠绕的线材对已经缠绕的线材在载具回转轴向有一个作用力,使得排布紧密。然而,上述方案由于都没有对层绕状态进行反馈,并且没有考虑线材层绕的实时情况,不具备根据层绕状态进行实时、自适应调整的功能,从而不能保证稳定、可靠、高质量的排线,无法应对如线材直径波动、载具幅宽变化等情况。
5.例如,专利cn210098561u提出了一种具有第一排线总成和第二排线总成的焊丝自动缠绕设备,其中第二排线总成包含一个排线刀片,在层绕第一层时,排线刀片与焊丝盘的中部表面相抵,并且随着焊丝的缠绕作业自一侧至另一侧移动,直至第一层焊丝缠绕完毕,然后排线刀片向外侧旋转离开焊丝盘,焊丝继续缠绕;再由第一排线总成控制焊丝的喂入位置,达到理想的排线效果。
6.然而,这种通过附加装置在层绕第一层时给焊丝施加作用力的设计,由于焊丝直径小且直径波动较大,而每一层的层绕圈数较多,误差积累之下排线刀片可能出现与焊丝脱离或者变形严重以致失效等情况,另外排线刀片与焊丝接触会划伤焊丝表面影响焊丝质量,从而难以保证工作过程中的可靠性和有效性。
7.又如,专利cn210260651u提出了一种焊丝排线负角执行装置,包括排线底座、模组、入线运动托块、l型支座、气缸、校直器、减速机和电机;其中,电机驱动模组上的入线运动托块在沿平行于层绕轴的方向上移动,以提供主要的排线运动;焊丝经入线运动托块上的校直器进行校直;校直器前端设置了l型支座,该l型支座上设置了气缸,气缸可以驱动两个档杆移动;档杆进一步控制焊丝形成负角。该专利的技术方案中缺点在于:以气缸驱动的
档杆的位移量不能与电机驱动的校直器模块的位移量匹配,因此档杆不能精确控制形成的负角的大小,这会造成层绕质量的不稳定、不可控。
8.此外,在自动送丝方面,现有的方案中送丝单元与排线装置都是分开的,且送丝单元主要由气缸驱动,首先夹取线材,然后将线材前送,勾丝完成后送丝单元撤离。这类设计存在可靠性不高、装置结构及控制复杂、制造成本高等问题。例如,专利cn209127800u提出的一种全自动高速层绕机,包括首尾丝机构,其中,首丝部件可以将尾丝剪断的焊丝头穿入料盘内,完成动作后退回。这种设计存在的问题是:由于线材直径小且表面光滑,线材夹持机构夹持其移动时线材会滑动,导致线材不能达成勾住载具的效果,并且,夹持部位与焊丝接触的长度有限,使伸出的焊丝前端的位置不可控,也会导致送丝失败。此外,额外的装置带来控制的复杂和不可靠性,也影响工作流程的连续性。
技术实现要素:
9.为了解决目前存在的上述问题,本发明提供了一种基于自动送丝的自适应排线设备及方法,所述技术方案如下:
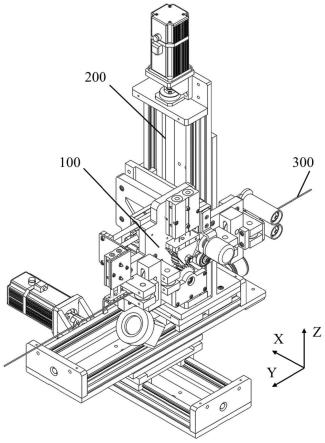
10.根据本发明的技术方案,所述设备包括:三轴移动平台和送丝排线装置,其中,所述送丝排线装置安装在所述三轴移动平台上;线材穿过所述送丝排线装置,并在所述三轴移动平台和所述送丝排线装置的控制下完成自动送丝并在载具上排线;将线材从进入所述送丝排线装置到穿出所述送丝排线装置的方向标记为y轴,将平行于载具回转轴线的方向标记为x轴,并且通过右手定则确定z轴,其中,载具安装在层绕机上,位于所述送丝排线装置的y轴正方向;
11.所述三轴移动平台包括固定平台和三个导轨滑台,其中,三个导轨滑台分别为x轴滑台,y轴滑台和z轴滑台,能够分别沿x、y、z方向移动,并且每个导轨滑台由电机丝杆驱动,z轴滑台安装在y轴滑台上,y轴滑台安装在x轴滑台上,x轴滑台安装在固定平台上;
12.在一种实施方式中,所述送丝排线装置包括基架,导入轮单元,入端轮式导向单元,计长单元,送丝单元,出端轮式导向单元,视觉测量单元和夹式导向单元;其中,所述送丝排线装置通过所述基架安装在所述三轴移动平台上;并且,所述导入轮单元,所述入端轮式导向单元,所述计长单元,所述送丝单元,所述出端轮式导向单元,所述视觉测量单元和所述夹式导向单元均安装在所述基架上,并且,所述导入轮单元,所述入端轮式导向单元,所述计长单元,所述送丝单元,所述出端轮式导向单元,所述视觉测量单元和所述夹式导向单元在所述基架上沿着y轴方向依次设置。
13.根据本发明的设备,当线材进入所述送丝排线装置时,首先穿入所述导入轮单元,再依次经过所述入端轮式导向单元,所述计长单元,所述送丝单元及所述出端轮式导向单元穿出,并且送丝时线材穿过所述夹式导向单元,层绕时线材与所述夹式导向单元分离;其中,所述导入轮单元用于限制线材在z轴方向的移动;所述入端轮式导向单元、所述出端轮式导向单元用于限制线材在x轴、z轴方向的移动;所述计长单元用于对送出线材的长度和层绕在载具上的线材的长度进行测量;所述送丝单元用于将线材沿y轴方向送出;所述夹式导向单元用于控制被送出的线材的自由端的位置,并将线材送入载具。
14.在一种实施方式中,所述基架为t型板,所述导入轮单元包括导入轮支架、上导入轮单元、下导入轮单元,所述上导入轮单元和所述下导入轮单元安装在所述导入轮支架上;
并且所述导入轮支架与所述i-x轴轮式导向模块固定连接。
15.在一种实施方式中,所述入端轮式导向单元包括i-x轴轮式导向模块、i-z轴轮式导向模块、ii-x轴轮式导向模块,i-x轴轮式导向模块和ii-x轴轮式导向模块安装在基架1上,i-z轴轮式导向模块安装在ii-x轴轮式导向模块上;i-x轴轮式导向模块和ii-x轴轮式导向模块的结构相同。
16.在一种实施方式中,所述出端轮式导向单元包括iii-x轴轮式导向模块、ii-z轴轮式导向模块、iv-x轴轮式导向模块,iii-x轴轮式导向模块和iv-x轴轮式导向模块安装在基架1上,ii-z轴轮式导向模块安装在iii-x轴轮式导向模块上;iii-x轴轮式导向模块和iv-x轴轮式导向模块的结构相同;并且所述入端轮式导向单元的结构与所述出端轮式导向单元相同。
17.在一种实施方式中,所述出端轮式导向单元中,所述iv-x轴轮式导向模块包括x导向轮支架、第一x导向轮轴、第二x导向轮轴、第一x导向轮、第二x导向轮;其中,所述第一x导向轮、所述第二x导向轮分别通过所述第一x导向轮轴、所述第二x导向轮轴安装在x导向轮支架上;所述ii-z轴轮式导向模块包括z导向轮支架、第一z导向轮轴、第二z导向轮轴、第一z导向轮、第二z导向轮;其中,所述第一z导向轮、所述第二z导向轮分别通过第一z导向轮轴、所述第二z导向轮轴安装在所述z导向轮支架上;所述ii-z轴轮式导向模块安装在i-x轴轮式导向模块上。
18.在一种实施方式中,所述计长单元包括固定轮、计长轮、计长传感器、计长传感器支架、计长传感器抬压器,其中,所述固定轮安装在所述送丝排线装置的基架上,所述计长轮安装在计长传感器上,计长传感器通过计长传感器支架安装在计长传感器抬压器上,计长传感器抬压器安装在基架上。
19.在一种实施方式中,所述计长传感器抬压器可选用滑台气缸,所述计长传感器可以选用光电式旋转编码器,计长传感器抬压器可将计长传感器及安装在其上的计长轮抬起或压下;当所述计长轮抬起时,线材的移动不会使计长传感器的输出发生变化,当所述计长轮压下时,计长传感器可以测得线材在y轴方向的移动量。
20.在一种实施方式中,所述送丝单元包括主动送丝轮、主动送丝轮悬端轴承、主动送丝轮悬端支架,从动送丝轮、从动送丝轮支架、从动送丝轮抬压器、主动送丝轮驱动电机、主动送丝轮驱动减速器;其中,所述主动送丝轮安装在主动送丝轮驱动减速器的输出轴上,所述主动送丝轮驱动电机安装在主动送丝轮驱动减速器上并驱动其带动主动送丝轮旋转;主动送丝轮驱动减速器的输出轴悬空,通过主动送丝轮悬端轴承安装在主动送丝轮悬端支架上以提供其悬端的支撑;从动送丝轮安装在从动送丝轮支架上,从动送丝轮支架安装在从动送丝轮抬压器上,从动送丝轮抬压器安装在所述送丝排线装置的基架上。
21.在一种实施方式中,所述主动送丝轮和从动送丝轮可选用圆柱齿轮,从动送丝轮抬压器可选用双杆气缸,主动送丝轮驱动电机可选用伺服电机,主动送丝轮驱动减速器可选用行星减速器,主动送丝轮驱动电机驱动主动送丝轮驱动减速器带动主动送丝轮旋转,从动送丝轮抬压器能够抬起或压下从动送丝轮,当所述从动送丝轮压下时,主动送丝轮和从动送丝轮可驱动线材沿y方向送出,实现自动送丝;当所述从动送丝轮抬起时,线材与主动送丝轮和从动送丝轮脱离并沿y轴移动。
22.在一种实施方式中,所述视觉测量单元包括视觉传感器、光源、视觉传感器支架,
光源安装在视觉传感器上,视觉传感器通过视觉传感器支架安装在所述送丝排线装置的基架上;所述夹式导向单元包括y轴伸缩滑台、滑台连接架、z轴伸缩滑台、夹式导向器,夹式导向器安装在z轴伸缩滑台上,z轴伸缩滑台通过滑台连接架安装在y轴伸缩滑台上,y轴伸缩滑台安装在所述送丝排线装置的基架上。
23.在一种实施方式中,视觉传感器可以选用高速工业ccd相机,光源可以选用环形led灯,视觉传感器可以对线材的位置进行测量。
24.在一种实施方式中,y轴伸缩滑台、z轴伸缩滑台可以选用滑台气缸,以分别提供夹式导向器在沿y轴和z轴上的移动。
25.在一种实施方式中,夹式导向器的结构如图7所示,所述夹式导向器可以有金属片折叠成形,具有一定的弹性,其前端设有“y”形开口,“y”形开口上部设有导线槽,如视图v所示,线材可经由该开口在图示箭头方向进入或脱离导线槽,线材在夹式导向器的导线槽内时,线材的前端由入端轮式导向单元、出端轮式导向单元和夹式导向器共同定位,定位精度高,线材脱离夹式导向器时可以避免其沿y轴移动时被夹式导向器划伤表面。
26.在一种实施方式中,夹式导向单元的工作示意如图8、图9、图10、图11所示;线材层绕过程中,如图8所示,y轴伸缩滑台和z轴伸缩滑台处于缩回状态,夹式导向器与线材脱离;当一个载具层绕线材达到既定长度或重量后,层绕停止,线材停止运动,如图9所示,z轴伸缩滑台沿z轴负方向伸出,带动夹式导向器运动并将线材经其上的“y”形开口导入到其上的导线槽内;线材被剪断后,如图10所示,y轴伸缩滑台伸出,带动夹式导向器沿y轴移动,线材在送丝单元的驱动下沿y轴伸出,线材的前端此时由入端轮式导向单元、出端轮式导向单元和夹式导向器共同定位,进行精准送丝;送丝完成且线材前端(自由端)与载具固连后,如图11所示,z轴伸缩滑台首先缩回,然后y轴伸缩滑台缩回,夹式导向单元回到如图8所示的位置,可以进行下一轮的层绕。
27.在一种实施方式中,视觉测量单元的工作原理如图12所示。层绕过程中线材由送丝排线装置的第一x导向轮、第二x导向轮之间牵出,该位置可称为绕出点;线材绕至载具上时,与已绕制的线材接触的点可称为绕入点;通过控制三轴移动平台沿x轴移动,即可控制绕出点相对绕入点的位置。视觉测量单元的视觉传感器可对绕出点和绕入点之间的线材进行成像,在视觉测量单元的光源的照明下,可以获得高对比度的图像,经处理图像如图9中放大区域所示;由于层绕过程中线材受牵拉力,绕出点和绕入点之间的线材呈直线,可以建立视觉传感器获取的图像与绕出点和绕入点的相对位置之间的关联关系,这一关联关系可以称为图像-位置模型。层绕过程中,根据视觉传感器获取的实时图像,通过图像-位置模型的解算,即可确定绕出点和绕入点的实时相对位置,根据实时相对位置,可以控制控制三轴移动平台沿x轴移动,以保证层绕的质量。
28.根据本发明实施例的技术方案,所述设备的自适应排线的原理如下:
29.在使线材在绕出点和绕入点之间为直线的状态下,控制三轴移动平台沿x轴移动,使绕出点相对绕入点的相对位置变化,在不同相对位置条件下对处于绕出点和绕入点之间的线材进行成像,并确保相对位置和图像之间的对应关系,可以获得多组相对位置和图像的数据。由于线材在绕出点和绕入点之间为直线,图像中在不同的y轴位置上x轴的位置信息与绕出点的位置信息成线性关系,通过线性拟合方法就可以建立高精度的图像-位置模型,或者通过其他算法也可以建立图像-位置模型。在层绕过程中,具备高速成像功能的视
觉传感器获得实时图像后,将图像带入模型即可计算出绕出点的相对位置。通过控制三轴移动平台沿x轴移动即可保证层绕过程始终保持在最佳状态。
30.本发明还提供一种基于自动送丝的自适应排线方法,所述方法采用如本发明实施例一所述的设备,所述方法包括如下步骤:
31.步骤一:操作人员确认三轴移动平台的各个滑台处于设定的初始位置,以及送丝排线装置中,计长单元的计长传感器抬压器处于抬起状态,送丝单元的从动送丝轮抬压器处于抬起状态;
32.步骤二:将合格的线材的自由端送入所述送丝排线装置中,并经导入轮单元、入端轮式导向单元、送丝单元、及出端轮式导向单元穿出;
33.步骤三:采用plc控制系统控制送丝单元的从动送丝轮抬压器压下,并确认线材被送丝单元的从动送丝轮和主动送丝轮夹紧,使线材处于从动送丝轮和主动送丝轮的轴向中间位置;
34.步骤四:操作人员牵拉以绷紧线材使其沿y轴为直线的状态下,控制夹式导向单元的z轴伸缩滑台伸出,使线材经夹式导向器的开口进入导线槽;
35.步骤五:按设定的线材自由端与夹式导向器的距离,剪去超出设定距离的线材,并采用plc控制系统控制夹式导向单元的y轴伸缩滑台伸出,控制计长单元的计长传感器抬压器压下,确认线材被计长单元的计长轮和固定轮夹住;
36.步骤六:移动三轴移动平台,使线材穿出所述送丝排线装置的自由端接近并对准载具上的穿线口;
37.步骤七:采用plc控制系统控制送丝单元的主动送丝轮驱动电机旋转,使线材沿y轴送出,并且送出的长度由计长单元精确控制,达到设定值后停止;
38.步骤八:完成线材与载具的固连后,采用plc控制系统控制夹式导向单元的y轴伸缩滑台缩回、z轴伸缩滑台缩回,控制送丝单元的从动送丝轮抬压器抬起;所述夹式导向器、所述从动送丝轮与线材分离,线材在载具上开始层绕;
39.步骤九:当载具层绕完成后,返回所述步骤三,继续下一载具的层绕,或结束层绕。
40.本发明进一步提供一种基于自动送丝的自适应排线方法,所述方法采用如本发明所述的自适应排线设备,所述方法包括如下步骤:
41.步骤一:操作人员确认线材与载具固连,并且所述载具旋转能够带动线材层绕后,采用plc控制系统控制三轴移动平台运动到线材开始层绕的位置,并通过控制三轴移动平台沿x轴移动,使线材与y轴平行,并保持线材的直线状态;
42.步骤二:打开视觉测量单元的光源,控制视觉传感器对处于绕出点和绕入点之间的线材进行成像;
43.步骤三:采用plc控制系统控制三轴移动平台沿x轴移动,使绕出点相对绕入点的相对位置变化,在不同相对位置条件下对处于绕出点和绕入点之间的线材进行成像,并确保图像和相对位置之间的对应关系,获得多组相对位置和图像的数据;
44.步骤四:根据已测得的多组线材相对位置和图像的数据,建立图像-位置模型;
45.步骤五:在线材层绕的过程中,通过视觉传感器获取实时图像,并依据所述图像-位置模型计算绕出点相对绕入点的实时相对位置;
46.步骤六:根据绕出点相对绕入点的实时相对位置,通过控制三轴移动平台沿x轴移
动,调整绕出点相对绕入点的相对位置。
47.本发明的有益效果:
48.采用本发明提出的一种层绕机自动送丝自适应排线设备及方法,可以实现自动送丝和自适应排线,并实现以下有益效果。
49.一、具备排线状态的反馈功能,能够自适应地进行排线;本发明提出的设备包括了基于视觉的测量装置,能够感知当前已层绕的线材的位置,并通过实时调整出端轮式导向单元的位置,能够对层绕过程进行实时调整,确保不出现堆叠、错排等非期望的排线结果。
50.二、能够适应不同的线材直径和载具幅宽;线材直径和载具幅宽的变化会使得各层的层绕圈数发生变化,对于不具备自适应功能的排线设备就会出现线材堆叠、错排等现象;本发明提出的设备和方法通过视觉测量感知,能够实时对排线过程做出调整,从而避免非期望的排线结果。
51.三、能够有效应对线材直径的波动;线材的实际直径和标称直径之间是存在误差的,且这种误差在不同的时刻是不一致的,这就是线材直径的波动,由于线材在每一层上缠绕的圈数较多,误差积累之下会使实际的线材绕入点的位置和理论绕入点的位置产生偏差,对于不具备自适应功能的排线设备,按固定的程式控制排线就会产生线材堆叠、错排等结果;比如,某一段时间内,线材直径偏小0.05mm,这样,在层绕20圈后就会比预计的绕入点位置偏差1mm,再累计若干圈之后,“负角”就会消失,甚至于形成“正角”,绕丝就会乱。而本发明提出的设备和方法根据实时的图像-位置模型,调整绕出点相对绕入点的相对位置,从而能够有效应对线材直径的波动;
52.四、集成化的自动送丝单元具备更高的可靠性、更紧凑的结构和更精益化的效果;本发明根据现有的数学原理建立图像-位置模型,比如线性回归、多项式回归、人工智能等等;并且在模型建立后,将实时获得的图像信息输入模型就可以得到线材绕出点和绕入点之间的相对位置,根据目标的相对位置和实际的相对位置之间的偏差(作为反馈),采用plc控制系统控制三轴平台调整绕出点的实际位置即可实现位置闭环控制,位置闭环控制精准控制送出线材的长度,提高了送丝过程的可靠性;本发明的设备中,由送丝排线装置送出的线材的自由端位置由夹式导向单元和出端轮式导向单元双位控制,送出线材的前端位置变动量小,进一步提高了送丝过程的可靠性;此外,创造性地将自动送丝单元与自适应排线装置集成,减少了设备的复杂程度、降低了制造成本。
附图说明
53.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
54.图1是本发明的自适应排线设备的总体结构示意图;
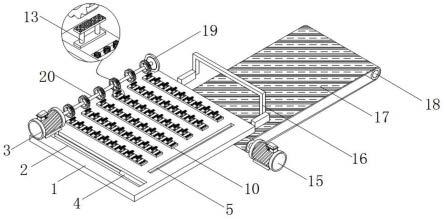
55.图2是本发明的设备中,送丝排线装置的总体结构示意图;
56.图3是本发明的设备中,基架、轮式导向单元和导入轮单元的结构示意图;
57.图4是本发明的设备中,轮式导向单元的结构示意图;
58.图5是本发明的设备中,计长单元和送丝单元的结构示意图;
59.图6是本发明的设备中,夹式导向单元、视觉测量单元和送丝模块驱动电机与减速器的结构示意图;
60.图7是本发明的设备中,夹式导向器的结构示意图;
61.图8是本发明的设备中,夹式导向单元的工作过程示意图;
62.图9是本发明的设备中,夹式导向单元的工作过程示意图;
63.图10是本发明的设备中,夹式导向单元的工作过程示意图;
64.图11是本发明的设备中,夹式导向单元的工作过程示意图;
65.图12是本发明的设备中,视觉测量单元的工作过程示意图;
66.其中,100-送丝排线装置;200-三轴移动平台;300-线材;1-基架;2-导入轮单元;3-入端轮式导向单元;4-计长单元;5-送丝单元;6-出端轮式导向单元;7-视觉测量单元;8夹式导向单元。
具体实施方式
67.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
68.实施例一:
69.本实施例提供一种基于自动送丝的自适应排线设备,该实施例装置的总体结构如附图1所示。
70.参见图1所示,所述设备包括:送丝排线装置100和三轴移动平台200;其中,送丝排线装置100安装在三轴移动平台200上,线材300穿过送丝排线装置100,并在送丝排线装置100的控制下完成自动送丝和排线。
71.为更简单明确地表述本发明提出的设备的结构,如图1所示,将线材从进入送丝排线装置100到穿出送丝排线装置100的方向标记为y轴,将平行于载具回转轴线的方向标记为x轴,并且通过右手定则确定z轴;其中,载具安装在层绕机上,位于所述送丝排线装置的y轴正方向。
72.作为一种举例,三轴移动平台200由三个导轨滑台组成,滑台由电机丝杆驱动,三个导轨滑台分别沿x、y、z方向,z轴滑台安装在y轴滑台上,y轴滑台安装在x轴滑台上,x轴滑台安装在固定平台上。
73.在一种实施方式中,送丝排线装置100的总体结构如图2所示,所述送丝排线装置100包括基架1,导入轮单元2,入端轮式导向单元3,计长单元4,送丝单元5,出端轮式导向单元6,视觉测量单元7和夹式导向单元8;其中,所述基架1为所述送丝排线装置100的基体结构,导入轮单元2,入端轮式导向单元3,计长单元4,送丝单元5,出端轮式导向单元6,视觉测量单元7和夹式导向单元8均安装在基架1上,所述送丝排线装置100通过基架1安装在三轴移动平台200上;并且,所述导入轮单元2,入端轮式导向单元3,计长单元4,送丝单元5,出端轮式导向单元6,视觉测量单元7和夹式导向单元8在基架1上沿着线材300进入所述送丝排线装置100到穿出所述送丝排线装置100的方向(即y轴方向)依次设置。
74.根据本实施例的自适应排线设备,在工作时,所述线材300首先穿入导入轮单元2,再依次经过入端轮式导向单元3,计长单元4,送丝单元5,出端轮式导向单元6穿出,并且,送丝时所述线材300穿过夹式导向单元8,层绕时所述线材300与夹式导向单元8分离;其中,导
入轮单元2用于限制线材300在z轴方向的移动;入端轮式导向单元3、出端轮式导向单元6用于限制线材在x轴、z轴方向的移动;计长单元4用于对送出线材的长度和层绕在载具上的线材的长度进行测量;送丝单元5用于将线材300沿y轴方向送出;夹式导向单元8用于控制被送出的线材300的自由端的位置,并以更高的精确度将线材送入载具。
75.在一种实施方式中,基架1、导入轮单元2、入端轮式导向单元3、和出端轮式导向单元6的结构示意如图3所示。作为一种举例,所述基架1为t型板,所述导入轮单元2包括导入轮支架21、上导入轮单元22、下导入轮单元23,上导入轮单元22和下导入轮单元23安装在导入轮支架21上;并且导入轮支架21与i-x轴轮式导向模块31固定连接。应该指出的是,本举例中导入轮的导入轮轴向沿x轴方向,但是,沿y方向或者xy方向组合的导入轮也应包含在本发明的宗旨内。
76.作为一种举例,如图3所示,入端轮式导向单元3包括i-x轴轮式导向模块31、i-z轴轮式导向模块32、ii-x轴轮式导向模块33,i-x轴轮式导向模块31和ii-x轴轮式导向模块33安装在基架1上,i-z轴轮式导向模块32安装在ii-x轴轮式导向模块33上。应该指出的是,本举例中x入端轮式导向单元3的轴轮式导向模块的数量为2个,并且i-x轴轮式导向模块31和ii-x轴轮式导向模块63的结构相同;i-z轴轮式导向模块的数量为1个,但是不同导向模块的数量和安装方法的实例都应包含在本发明的内涵之中。
77.作为一种举例,如图3所示,出端轮式导向单元6包括iii-x轴轮式导向模块61、ii-z轴轮式导向模块62、iv-x轴轮式导向模块63,iii-x轴轮式导向模块61和iv-x轴轮式导向模块63安装在基架1上,ii-z轴轮式导向模块62安装在iii-x轴轮式导向模块63上。作为一种举例,入端轮式导向单元3的结构与出端轮式导向单元6相同。应该指出的是,本举例中出端轮式导向单元6的x轴轮式导向模块的数量为2个,并且iii-x轴轮式导向模块61和iv-x轴轮式导向模块63的结构相同;z轴轮式导向模块的数量为1个,但是不同导向模块的数量和安装方法的实例都应包含在本发明的内涵之中。
78.在一种实施方式中,iv-x轴轮式导向模块63和ii-z轴轮式导向模块62的结构示意如图4所示。iv-x轴轮式导向模块63包括x导向轮支架631、第一x导向轮轴632、第二x导向轮轴633、第一x导向轮634、第二x导向轮635;其中,第一x导向轮634、第二x导向轮635分别通过第一x导向轮轴632、第二x导向轮轴633安装在x导向轮支架631上。ii-z轴轮式导向模块62包括z导向轮支架621、第一z导向轮轴622、第二z导向轮轴623、第一z导向轮624、第二z导向轮625;其中,第一z导向轮624、第二z导向轮625分别通过第一z导向轮轴622、第二z导向轮轴623安装在z导向轮支架621上。ii-z轴轮式导向模块62安装在i-x轴轮式导向模块63上。
79.在一种实施方式中,计长单元4和送丝单元5的结构示意如图5所示。计长单元4包括固定轮41、计长轮42、计长传感器43、计长传感器支架44、计长传感器抬压器45,其中,固定轮41安装在基架1上,计长轮42安装在计长传感器43上,计长传感器43通过计长传感器支架44安装在计长传感器抬压器45上,计长传感器抬压器45安装在基架1上。
80.作为一种举例,计长传感器抬压器45可以选用滑台气缸,计长传感器43可以选用光电式旋转编码器,计长传感器抬压器45可以将计长传感器43及安装在其上的计长轮42抬起或压下,当计长轮42抬起时,线材300的移动不会使计长传感器43的输出发生变化,当计长轮42压下时,计长传感器43可以测得线材300在y轴方向的移动量。
81.如图5、图6所示,送丝单元5包括主动送丝轮51、主动送丝轮悬端轴承52、主动送丝轮悬端支架53,从动送丝轮54、从动送丝轮支架55、从动送丝轮抬压器56、主动送丝轮驱动电机57、主动送丝轮驱动减速器58。其中,主动送丝轮51安装在主动送丝轮驱动减速器58输出轴上,主动送丝轮驱动电机57安装在主动送丝轮驱动减速器58上并驱动其带动主动送丝轮51旋转;主动送丝轮驱动减速器58的输出轴悬空,故通过主动送丝轮悬端轴承52安装在主动送丝轮悬端支架53上以提供其悬端的支撑;从动送丝轮54安装在从动送丝轮支架55上,从动送丝轮支架55安装在从动送丝轮抬压器56上,从动送丝轮抬压器56安装在基架1上。
82.作为一种举例,主动送丝轮51和从动送丝轮54可以选用圆柱齿轮,从动送丝轮抬压器56可以选用双杆气缸,主动送丝轮驱动电机57可以选用伺服电机,主动送丝轮驱动减速器58可以选用行星减速器,主动送丝轮驱动电机57驱动主动送丝轮驱动减速器58带动主动送丝轮51旋转,从动送丝轮抬压器56能够抬起或压下从动送丝轮54,当从动送丝轮54压下时,主动送丝轮51和从动送丝轮54可以驱动线材300沿y方向送出,实现自动送丝;当从动送丝轮54抬起时,线材300与主动送丝轮51和从动送丝轮54脱离并可沿y轴移动。
83.在一种实施方式中,视觉测量单元7和夹式导向单元8的结构示意如图6所示。视觉测量单元7包括视觉传感器71、光源72、视觉传感器支架73,光源72安装在视觉传感器71上,视觉传感器71通过视觉传感器支架73安装在基架1上。夹式导向单元8包括y轴伸缩滑台81、滑台连接架82、z轴伸缩滑台83、夹式导向器84,夹式导向器84安装在z轴伸缩滑台83上,z轴伸缩滑台83通过滑台连接架82安装在y轴伸缩滑台81上,y轴伸缩滑台81安装在基架1上。
84.作为一种举例,视觉传感器71可以选用高速工业ccd相机,光源72可以选用环形led灯,视觉传感器71可以对线材300的位置进行测量。
85.作为一种举例,y轴伸缩滑台81、z轴伸缩滑台83可以选用滑台气缸,以分别提供夹式导向器84在沿y轴和z轴上的移动。
86.作为一种举例,夹式导向器84的结构如图7所示,夹式导向器84可以有金属片折叠成形,具有一定的弹性,其前端设有“y”形开口,“y”形开口上部设有导线槽,如视图v所示,线材可经由该开口在图示箭头方向进入或脱离导线槽,线材在夹式导向器84的导线槽内时,线材300的前端由入端轮式导向单元3、出端轮式导向单元6和夹式导向器84共同定位,定位精度高,线材300脱离夹式导向器84时可以避免其沿y轴移动时被夹式导向器84划伤表面。
87.作为一种举例,夹式导向单元8的工作过程示意如图8、图9、图10、图11所示。线材层绕过程中,如图8所示,y轴伸缩滑台81和z轴伸缩滑台83处于缩回状态,夹式导向器84与线材300脱离;当一个载具层绕线材达到既定长度或重量后,层绕停止,线材300停止运动,如图9所示,z轴伸缩滑台83沿z轴负方向伸出,带动夹式导向器84运动并将线材300经其上的“y”形开口导入到其上的导线槽内;线材300被剪断后,如图10所示,y轴伸缩滑台81伸出,带动夹式导向器84沿y轴移动,线材300在送丝单元5的驱动下沿y轴伸出,线材300的前端此时由入端轮式导向单元3、出端轮式导向单元6和夹式导向器84共同定位,进行精准送丝;送丝完成且线材300前端(自由端)与载具固连后,如图11所示,z轴伸缩滑台83首先缩回,然后y轴伸缩滑台81缩回,夹式导向单元8回到如图8所示的位置,可以进行下一轮的层绕。
88.在一种实施方式中,视觉测量单元的工作原理如图12所示。层绕过程中线材由送
丝排线装置100的第一x导向轮634、第二x导向轮635之间牵出,该位置可称为绕出点;线材绕至载具上时,与已绕制的线材接触的点可称为绕入点;通过控制三轴移动平台沿x轴移动,即可控制绕出点相对绕入点的位置。视觉测量单元的视觉传感器可对绕出点和绕入点之间的线材进行成像,在视觉测量单元的光源的照明下,可以获得高对比度的图像,经处理图像如图9中放大区域所示;由于层绕过程中线材受牵拉力,绕出点和绕入点之间的线材呈直线,可以建立视觉传感器获取的图像与绕出点和绕入点的相对位置之间的关联关系,这一关联关系可以称为图像-位置模型。层绕过程中,根据视觉传感器获取的实时图像,通过图像-位置模型的解算,即可确定绕出点和绕入点的实时相对位置,根据实时相对位置,可以控制控制三轴移动平台沿x轴移动,以保证层绕的质量。
89.根据本实施例的技术方案,所述设备的自适应排线的原理如下:在使线材在绕出点和绕入点之间为直线的状态下,控制三轴移动平台沿x轴移动,使绕出点相对绕入点的相对位置变化,在不同相对位置条件下对处于绕出点和绕入点之间的线材进行成像,并确保相对位置和图像之间的对应关系,可以获得多组相对位置和图像的数据。由于线材在绕出点和绕入点之间为直线,图像中在不同的y轴位置上x轴的位置信息与绕出点的位置信息成线性关系,通过线性拟合方法就可以建立高精度的图像-位置模型,或者通过其他算法也可以建立图像-位置模型。在层绕过程中,具备高速成像功能的视觉传感器获得实时图像后,将图像带入模型即可计算出绕出点的相对位置。通过控制三轴移动平台沿x轴移动即可保证层绕过程始终保持在最佳状态。
90.实施例二:
91.本发明还提供一种基于自动送丝的自适应排线方法,所述方法采用如本发明实施例一所述的设备,所述方法包括如下步骤:
92.步骤一:操作人员确认三轴移动平台的各个滑台处于设定的初始位置,以及送丝排线装置中,计长单元的计长传感器抬压器处于抬起状态,送丝单元的从动送丝轮抬压器处于抬起状态;
93.步骤二:将合格的线材的自由端送入所述送丝排线装置中,并经导入轮单元、入端轮式导向单元、送丝单元、及出端轮式导向单元穿出;
94.步骤三:采用plc控制系统控制送丝单元的从动送丝轮抬压器压下,并确认线材被送丝单元的从动送丝轮和主动送丝轮夹紧,使线材处于从动送丝轮和主动送丝轮的轴向中间位置;
95.步骤四:操作人员牵拉以绷紧线材使其沿y轴为直线的状态下,控制夹式导向单元的z轴伸缩滑台伸出,使线材经夹式导向器的开口进入导线槽;
96.步骤五:按设定的线材自由端与夹式导向器的距离,剪去超出设定距离的线材,并采用plc控制系统控制夹式导向单元的y轴伸缩滑台伸出,控制计长单元的计长传感器抬压器压下,确认线材被计长单元的计长轮和固定轮夹住;
97.步骤六:移动三轴移动平台,使线材穿出所述送丝排线装置的自由端接近并对准载具上的穿线口;
98.步骤七:采用plc控制系统控制送丝单元的主动送丝轮驱动电机旋转,使线材沿y轴送出,并且送出的长度由计长单元精确控制,达到设定值后停止;
99.步骤八:完成线材与载具的固连后,采用plc控制系统控制夹式导向单元的y轴伸
缩滑台缩回、z轴伸缩滑台缩回,控制送丝单元的从动送丝轮抬压器抬起;所述夹式导向器、所述从动送丝轮与线材分离,线材在载具上开始层绕;
100.步骤九:当载具层绕完成后,返回所述步骤三,继续下一载具的层绕,或结束层绕。
101.实施例三
102.本发明进一步提供一种基于自动送丝的自适应排线方法,所述方法采用如本发明实施例一所述的自适应排线设备,所述方法包括如下步骤:
103.步骤一:操作人员确认线材与载具固连,并且所述载具旋转能够带动线材层绕后,采用plc控制系统控制三轴移动平台运动到线材开始层绕的位置,并通过控制三轴移动平台沿x轴移动,使线材与y轴平行,并保持线材的直线状态;
104.步骤二:打开视觉测量单元的光源,控制视觉传感器对处于绕出点和绕入点之间的线材进行成像;
105.步骤三:控制三轴移动平台沿x轴移动,使绕出点相对绕入点的相对位置变化,在不同相对位置条件下对处于绕出点和绕入点之间的线材进行成像,并确保图像和相对位置之间的对应关系,获得多组相对位置和图像的数据;
106.步骤四:根据已测得的多组线材相对位置和图像的数据,建立图像-位置模型;
107.步骤五:在线材层绕的过程中,通过视觉传感器获取实时图像,并依据所述图像-位置模型计算绕出点相对绕入点的实时相对位置;
108.步骤六:根据绕出点相对绕入点的实时相对位置,通过控制三轴移动平台沿x轴移动,调整绕出点相对绕入点的相对位置,使层绕过程始终保持在最佳状态。
109.根据本实施例,能够根据现有的数学原理建立图像-位置模型,比如线性回归、多项式回归、人工智能等等;并且在模型建立后,将实时获得的图像信息输入模型就可以得到绕出点和绕入点之间的相对位置,根据目标的相对位置和实际的相对位置之间的偏差(作为反馈),控制三轴平台调整绕出点的实际位置即可实现位置闭环控制,位置闭环控制精准控制送出线材的长度,提高了送丝过程的可靠性;本发明的设备中,由送丝排线装置送出的线材的自由端位置由导向夹和出线滚双位控制,送出线材的前端位置变动量小,进一步提高了送丝过程的可靠性。
110.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。