1.本发明涉及医疗垃圾桶技术领域,尤其涉及基于物联网与多模态传感技术的智能垃圾桶及其使用方法。
背景技术:
2.众多公共场所(如医院)每天都会产生大量垃圾,其中医院由于其服务性质,产生的垃圾带有病原体、残留药物和化学试剂等污染物,需要妥善回收与处理。
3.但是当前广泛使用的垃圾桶都非常原始:使用时需要手动打开垃圾桶盖,造成了使用者与医疗废弃物的接触;垃圾桶中的垃圾量无法实时监控,其清理与垃圾回收需要清洁人员每日检查,管理不便;对于垃圾桶内的有害物质含量,也无法进行实时监测,危害公共场所人群和清洁人员身体健康。
4.近年来,智能化垃圾桶的概念已被提出,即盖子可以通过接近传感实现自动开关;江苏省人民医院的王艳艳团队基于双光电传感器以及机电装置对垃圾桶的自动开盖过程进行了优化(发明专利cn109911467a)。但这些改进仍然处在一个较初级的程度,存在着诸如无法监控垃圾桶盖是否被恶意打开、无法管理垃圾种类、无法预测桶内垃圾需要回收处理的时间等问题。
技术实现要素:
5.本发明的目的在于提出基于物联网与多模态传感技术的智能垃圾桶及其使用方法,以解决存在着无法监控垃圾桶盖是否被恶意打开、无法管理垃圾种类、无法预测桶内垃圾需要回收处理的时间的技术问题。
6.为达此目的,本发明采用以下技术方案:基于物联网与多模态传感技术的智能垃圾桶,包括:内桶、外壳、垃圾桶盖、控制核心、物联网模块、称重模块、测距模块、打印机、指纹识别模块、自动开盖模块、sd卡模块和触摸显示屏模块;所述内桶用于盛放垃圾;所述外壳套设于所述内桶的外周;所述垃圾桶盖铰接在所述外壳,所述垃圾桶盖用于封盖所述外壳的开口;所述控制核心设置在外壳的桶壁上,用于控制多个模块的工作;所述物联网模块用于连接物联网平台与控制核心,提供嵌入式系统与物联网平台的通讯通道,所述嵌入式系统用于通过物联网平台所提供的api接口完成与云端服务器的数据交互,物联网平台通过相应的api接口下发数据读、写指令;所述称重模块与所述控制核心和物联网模块电连接,所述称重模块设置在所述内桶的底部,用于监控内桶内垃圾的重量;所述测距模块与所述控制核心和物联网模块电连接,所述测距模块安装在垃圾桶盖的中间位置,用于向桶内测距,以监控内桶内的垃圾体积;所述打印机与所述控制核心和物联网模块电连接,所述打印机用于打印用户投放垃圾以及清洁人员清理垃圾的凭条;所述指纹识别模块与所述控制核心和物联网模块电连接,所述指纹识别模块设置在所述外壳的外壁,用于比对开盖时操作人员的身份信息;所述自动开盖模块与所述控制核心和物联网模块电连接,所述自动开盖模块安装于外壳与垃圾桶盖之间的连接轴处,用于根据控制核心的控制自动开关垃圾桶
盖;所述sd卡模块与所述控制核心和物联网模块电连接,用于存储待显示的数据与保存所述嵌入式系统的运行日记;所述触摸显示屏模块与所述控制核心和物联网模块电连接,所述的触摸显示屏模块用于显示嵌入式系统的实时状态与所检测的物理量,同时提供视频播放、二维码显示以及触摸控制的人机交互功能。
7.作为一种可选的实施例,在本发明第一方面中,所述称重模块为设有应变式压力传感器作为称重支架,配合24位ad转换模块hx711芯片实现垃圾重量的测量,所述称重支架安装于所述外壳内侧的底部,所述内桶放置在所述称重支架上,内桶重量完全作用在称重支架上;应变式压力传感器包括四个阵列排布的应变片,其中两个应变片受形变而阻值变小,另外两个应变片受拉形变而阻值变大;四个应变片在电路连接上构成全桥电路,在其中一对角结点输入激励电压,在另一对角结点会输出相应电压值,且电压值大小与支架承载压力大小成正比;hx711芯片与称重支架中全桥电路之间共四根导线连接,每根导线连接到全桥电路的一个结点;其中两根导线施加电压激励;两根输出测量有效电压值,被hx711芯片采集并进行模数转化;hx711芯片与控制核心的主控芯片之间共两根信号线连接,包含同步时钟线pd_sck和数据线dout,两根信号线连接到主控芯片上任意两个独立的数字io引脚,hx711芯片与主控芯片之间采用hx711芯片私有的数字协议通信。
8.作为一种可选的实施例,在本发明第一方面中,测距模块选用tof10120激光测距模块,其测量面朝桶内安装,测距模块与控制核心的主控芯片之间采用标准的iic协议通信,测距模块与控制核心的主控芯片之间共2根信号线连接,包含同步时钟线scl与数据线sda。
9.作为一种可选的实施例,在本发明第一方面中,所述控制核心还包括锂电池、电源电路、防反接电路、防浪涌电流电路、晶振电路、falsh模块和纽扣电池;所述锂电池为7.4v可充电的锂电池,用于为控制核心提供电能;所述电源电路基于同步降压转换器,以电源效率大于90%地将输入的电源转为嵌入式系统所需的电压;所述防反接电路采用pmos管,用于防止控制核心因电池反接误操作而造成的损毁;所述防浪涌电路基于瞬态抑制二极管(tvs),用于为潜在的静电放电风险(esd)提供有效保护;所述晶振电路包括25mhz的系统晶振和32.768khz的实时钟(rtc)晶振,所述25mhz的系统晶振用于为嵌入式系统提供工作所需的基准时钟;所述32.768khz的实时钟(rtc)晶振用于在掉电时保存系统的时间信息与关键数据;所述纽扣电池用于在嵌入式系统掉电或进入低功耗模式时为实时钟、关键数据存储提供电能;所述的flash模块用于存储汉字字库,为触摸显示屏模块提供汉字显示的功能。
10.作为一种可选的实施例,在本发明第一方面中,锂电池通过一个分压电路连接至主控芯片的adc引脚,用于对电池电量进行实时监测。
11.作为一种可选的实施例,在本发明第一方面中,所述外壳设有电磁屏蔽罩,所述电磁屏蔽罩围蔽所述控制核心和物联网模块,所述物联网模块的天线伸出至所述电磁屏蔽罩的外侧。
12.作为一种可选的实施例,在本发明第一方面中,每一个模块都有一个与之对应的led工作状态指示灯,在模块正常工作时,于其对应的led工作状态指示灯亮起;当模块不工作时,led工作状态指示灯熄灭。
13.在本发明第二方面公开了基于物联网与多模态传感技术的智能垃圾桶的使用方
法,应用在本发明第一方面公开的基于物联网与多模态传感技术的智能垃圾桶,包括如下步骤:
14.s0、嵌入式系统上电前,完成flash字库文件的烧写,同时往sd卡写入需要在显示屏上展示的内容,并对相关人员的身份信息进行登记,暂存于控制核心的flash模块中;
15.s1、嵌入式系统上电,控制核心的主控芯片完成打印机、称重模块、测距模块、触摸显示屏模块、指纹识别模块、自动开盖模块以及sd卡模块的初始化;
16.s2、嵌入式系统主动配置物联网模块;首先进行上电检查,确定物联网模块开机成功;而后进行信号质量检查,确定模组ps域的附着状态;接着订阅对象与资源,而后将模组登陆到物理网平台;若在规定时间内无法成功登陆,则通过拉低复位引脚重启模组,再执行s2流程,直至模组成功登陆;
17.s3、由于nb-iot模组登陆成功后有存活时间限制,超过这个时间范围物联网平台将强制将模组下线。为此,嵌入式系统每隔一段时间发送更新存活时间指令以更新模块的存活时间,保证模组处在实时在线状态;
18.s4、所有模块初始化完成后,系统进入正常工作模式;触摸显示屏模块的显示屏显示相关数据与上次投入垃圾的相关参数;
19.s5、当需要往垃圾桶中投入垃圾时,指纹识别模块读取操作人员的指纹进行身份验证;通过验证后触摸显示屏模块自动调出二维码界面,所述二维码用于供操作人员扫描及填写医疗垃圾产生的科室与垃圾的种类信息,物理网平台将垃圾的种类信息自动比对数据库内的数据,若比对成功,则利用物联网模组向嵌入式系统下放许可指令;
20.s6、当嵌入式系统收到物理网平台下发的许可指令,则控制核心控制自动开盖模块的步进电机正转,将垃圾桶盖打开;嵌入式系统将称重模块和测距模块对当前内桶内的垃圾特征进行测量,同时通过物理网平台上传本次投入医疗废物的重量、医疗废物体积信息以及操作人员信息,并调用打印机打印本次投入的医疗废物重量、医疗废物体积以及操作人员的信息;
21.s7、完成垃圾投放操作后,触摸显示屏接收关闭操作,自动开盖模块的步进电机反转,将垃圾桶盖关闭并上锁;
22.s8、系统将重复步骤s4~s8。
23.作为一种可选的实施例,在本发明第二方面中,所述步骤s7中,触摸显示屏接收关闭操作前,还包括如下步骤:依据投入垃圾的质量/体积比对投入医疗废物的种类进行判断;若判定投入的垃圾种类与此垃圾桶收集的医疗废物种类相一致,则触摸显示屏接收关闭操作;若判定投入的垃圾种类与此垃圾桶收集的医疗废物种类不一致,则触摸显示屏填出确认窗口供操作人员进行确认。
24.作为一种可选的实施例,在本发明第二方面中,步骤s6中,当称重模块检测到内桶重超过设定阈值和/或测距模块检测到目前的废物体积超过设定阈值,则嵌入式系统通向物联网平台发送满桶警报,物联网平台将满桶警报推送至对应的操作人员的移动端上。
25.与现有技术相比,本发明实施例具有以下有益效果:
26.集成多种传感器技术,实现了对垃圾桶存储状态(垃圾重量、体积)的双维度监控,相比传统垃圾桶更有利于实现垃圾处理系统的主动监管;集成化的电路设计使得系统具有相当的独立性,可以单独的垃圾桶系统出售,而无需复杂的传感器组网调试过程即可正常
使用;
27.补充了与用户的交互媒介,使用显示屏播放宣传与说明视频规范了医疗废弃物投放时的封装流程,一方面降低了因不正确封装造成的泄露风险,另一方面降低了智能垃圾桶的学习使用门槛。此外,使用嵌入式打印机打印凭条与标签,可将医疗废物的种类与信息精确到每一个封装;通过与物联网平台记录的相互印证来避免出现运输过程中可能出现的医疗废物丢失、恶意盗窃的情况,提高了医疗废弃物管理与处理的效率;
28.采用扫码填报式的垃圾投放方式,用户需要填写垃圾种类与数量等简明信息后才得以开盖投放,使得投入桶中的垃圾可追踪、可溯源;
29.加入了结合云端控制与垃圾桶状态信息的自动翻盖系统,一方面减少了用户与垃圾桶之间的物理接触、减少疾病传播途径;另一方面也减少了垃圾桶满之后继续被投放垃圾的情况,减少了垃圾溢出,保证垃圾桶盖得以正常闭合,从而减少垃圾有毒有害气体、病原体等外泄,同时也方便清洁人员回收;
30.采用多重认证技术(指纹识别、物联网软件认证等)来确保垃圾投放人员的身份,未通过认证将会锁死垃圾桶盖,防止医疗废弃物被恶意取出,或不规范操作而造成的泄漏情况。
31.使用了大量的电路创新设计,保证智能垃圾桶功能正常、鲁棒性高、使用寿命长。针对电路结构的地平面阻抗、信号线等做了仿真优化,使得系统具有较好的抗噪声干扰能力,同时对误操作具有很强的鲁棒性。
32.数据通讯基于nb-iot平台,由三大运营商直接管辖,在有手机信号的地方即可入网,无需复杂的组网过程与高昂的组网费用,有利于降低系统成本,应用在偏远地区的医院中。
附图说明
33.图1是本发明其中一个实施例的电路整体结构示意图;
34.图2是本发明其中一个实施例的不同输入电压下的电池效率示意图;
35.图3是本发明其中一个实施例的电源-地平面组抗优化结果示意图;
36.图4是完成布线优化后的实际布线图;
37.图5是未完成布线优化时的sdram信号线间串扰情况;
38.图6是完成布线优化后的sdram信号线间串扰情况;
39.图7是完成布线优化后的sdram信号线眼图;
40.图8是本发明其中一个实施例的boot引脚设置电路示意图;
41.图9是本发明其中一个实施例的m5310-a初始化流程示意图;
42.图10是本发明其中一个实施例的嵌入式系统工作流程示意图;
43.图11是本发明其中一个实施例的防反接电路示意图;
44.图12是本发明其中一个实施例的控制核心3d仿真图;
45.图13是本发明其中一个gui界面示意图。
具体实施方式
46.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终
相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
47.在本发明的描述中,需要理解的是,术语“纵向”、“横向”“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征,用于区别描述特征,无顺序之分,无轻重之分。
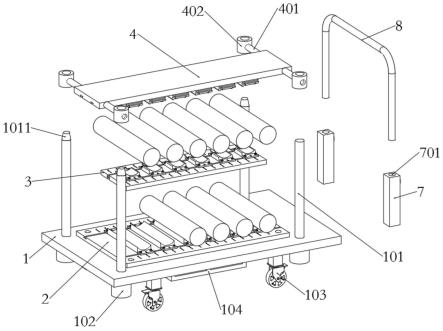
48.下面结合图1至图13,描述本发明实施例的基于物联网与多模态传感技术的智能垃圾桶,硬件设备包括内桶、外壳、垃圾桶盖、控制核心、物联网模块、称重模块、测距模块、打印机、指纹识别模块、自动开盖模块、sd卡模块和触摸显示屏模块。
49.所述内桶即智能垃圾桶中直接盛放垃圾的内部桶体,其与垃圾直接接触、承载垃圾重量,并且方便从垃圾桶中取出来做垃圾倾倒与清洁工作;
50.所述外壳套设于所述内桶的外周;即智能垃圾桶的外部壳体,主要用来保护智能垃圾桶的传感模块与电子元件,同时提供良好的垃圾桶视觉观感、方便垃圾桶的搬运与管理。
51.所述垃圾桶盖铰接在所述外壳,所述垃圾桶盖用于封盖所述外壳的开口;
52.所述控制核心设置在外壳的桶壁上,用于控制多个模块的工作;所述控制核心包括主控芯片和电路控制核心板,所述主控芯片具有嵌入式系统。具体地,在本实施例中,选用stm32f429iit6作为主控芯片,是一种具有位的cpu核心,集成了浮点运算单元(fpu)、自适应实时加速器(art),工作时钟频率达180mhz,并支持dsp指令;同时,除片上内存flash外,该芯片还允许芯片外挂载sdram、nor/nand内存等ram设备,以扩展存储器的可用内存。其集成了lcd-tft控制器,具有完全可编程分辨率(总宽度高达4096像素,总高度高达2048行,像素时钟可达83mhz),及用于增强图形内容创建功能的chrom加速器(dma2d);同时支持外接用于睡眠、停止和待机模式rtc供电的后备电源,并具有20
×
32位备份寄存器与可选的4kb备份sram,可用于在掉电时存储嵌入式系统关键的运行数据。该芯片还提供了数据流的通道dma,支持fifo和突发传输,能够满足本嵌入式系统显示图像时的高数据传输速率要求。
53.所述电路控制核心板包括锂电池、电源电路、防反接电路、基于瞬态抑制二极管(tvs)的防浪涌电流电路、晶振电路、falsh模块和纽扣电池;
54.优选地,所述电源电路基于同步降压转换器,以电源效率大于90%地将输入的电源转为嵌入式系统所需的电压;从供电角度考虑,本系统采用锂电池的方式来供电,使嵌入式系统不受市电220v插座位置限制,能够摆放在任何需要的位置。本实施例选用7.4v可充电锂电池供电,并采用同步降压转换器芯片tps561201实现7.4v到5v(系统工作电压)的转换。相比于低压差线性稳压器(ldo),电源效率能够从ldo的《70%提升到90%,能够大大提高系统的工作时长,同时降低电源芯片的发热现象,减小火灾风险。
55.优选地,所述防反接电路采用pmos管,用于防止控制核心因电池反接误操作而造成的损毁;如图11所示,当电源正常接入时,由于pmos管存在寄生二极管,源极电压vs为vcc-0.7v,栅极电压vg=0v,此时栅-源电压vgs绝对值大于阈值电压vth,pmos管导通,电流
从mos管流过,导致漏极d与源极s压降减小,防反接电路不起作用;而当电源反接时,源极电压vs为-0.7v,栅极电压vg=vcc,无法满足导通条件,pmos管闭合,无电流流过电路,防反接电路开始发挥作用。位于栅极的电阻r1能够避免出现栅极电流过大的情况,进而保护pmos管;而漏极d与地之间加入电容c1,在对输入电压进行滤波的同时,也延缓了上电时vo电压上升的速度,起到了“冷启动”的效果,防止电池接入瞬间过冲电流对系统造成的损害,进而保护了后续的电路。
56.优选地,所述防浪涌电路基于瞬态抑制二极管(tvs),用于为潜在的静电放电风险(esd)提供有效保护;在电路控制核心板制造或者运输途中,电路控制核心板有可能因为摩擦而积累电荷,造成esd现象。esd现象将在上电瞬间流经核心板的电源-地平面,对连接在电源-地平面上的器件造成一个极大的冲击,造成相关芯片损毁。tvs管能够在两端受瞬间的高能量冲击时,自动将自身的阻抗迅速降低,在将两端间的电压箝位在一个预定的数值上的同时,吸收瞬态的大电流,从而确保连接在电源-地平面上的电路元件不会瞬态高能量的冲击而损坏。
57.优选地,所述晶振电路包括25mhz的系统晶振和32.768khz的实时钟(rtc)晶振,所述25mhz的系统晶振用于为嵌入式系统提供工作所需的基准时钟;所述32.768khz的实时钟(rtc)晶振用于在掉电时保存系统的时间信息与关键数据。所述纽扣电池用于在系统掉电或进入低功耗模式时为实时钟、关键数据存储提供电源。所述的flash模块用于存储汉字字库,为触摸显示屏模块提供汉字显示的功能。
58.作为一种优选的实施例,由于本智能垃圾桶涉及sdram、lcd与180mhz工作频率的主控芯片,每一个高速模块在工作时都会产生与工作频段相关的瞬时电流,该瞬时电流流经电源-地平面间的阻抗将导致电源-地平面间压差产生变化。若该电压变化过大,将导致嵌入式系统发生异常,甚至崩溃。当器件的工作频率超过10mhz后,信号完整性问题需要在布线时被认真地分析。过长的布线、信号线上过多的阻抗突变,及相邻信号线间过多的串扰都将导致接收端接收到的信号发生严重畸变,造成误码现象。因此,在全工作频段(100khz~180mhz)内都呈现良好低阻抗(《0.5ω)的电源-地平面将是系统正常工作的重要前提。在完成器件的布线后,对电源-地平面之间的阻抗进行优化,通过采用不同容值的电容组合,最终使得电源-地平面的阻抗在全工作频段(100khz~180mhz)内都小于0.5ω,保证系统的正常工作。电源-地平面阻抗优化结果如图3所示。在本实施例中,对sdram与lcd屏幕高速模块的布线在信号线长度、阻抗方面做了相应的优化:将sdram的信号线长度偏差控制在50mil以内,保证相邻层信号线垂直通过,并保证每根信号线上的过孔小于2个。同时,在信号线间隙保证具有足够的铺铜(连接至地)以提供高频信号的回流路径,并保证不同信号线的阻抗一致,最终将相关信号时延、信号线间的串扰控制在可接受的范围内。sdram的相关优化结果如图4~图7所示,图4为完成优化后的核心板布线情况,图5为优化前的sdram信号线间串扰电压大小(最大值约为27mv),图6为布线优化后的sdram信号线间串扰电压大小(最大值约为6mv,线间串扰降低了4倍以上),图7为优化完成后的sdram信号线眼图情况,可以看到信号过冲下冲幅度均小于0.5v,能够保证电路的正常工作;且信号线间最大的延时为0.2ns,远小于sdram的工作主频,保证了系统的正常工作。而后sdram模块连接至主控芯片的fmc接口上,用于实现系统运行ram的扩充,为lcd屏提供大容量的显存空间,为图形化交互界面(gui)的正常运作提供内存空间。
59.所述物联网模块用于连接物联网平台与控制核心,提供嵌入式系统与物联网平台的通讯通道,所述嵌入式系统用于通过物联网平台所提供的api接口完成与云端服务器的数据交互,物联网平台通过相应的api接口下发数据读、写指令;具体地,物联网模块选用已批量生产的nb-iot模组m5310-a(中移物联网有限公司生产),连接至主控芯片的异步串行接收/发送器(usart)外设上,采用usart协议与主控芯片进行通讯。
60.所述称重模块与所述控制核心和物联网模块电连接,所述称重模块设置在所述内桶的底部,用于监控内桶内垃圾的重量;具体地,所述称重模块选用应变式压力传感器作为称重支架,配合24位ad转换模块hx711芯片实现垃圾重量的测量,所述称重支架安装于所述外壳内侧的底部,所述内桶放置在所述称重支架上,内桶重量完全作用在称重支架上;应变式压力传感器包括四个阵列排布的应变片,在称重支架的架体制作时,应变片浇筑在称重支架的架体内,以构成称重支架,其中两个应变片受压形变而阻值变小,另外两个应变片受拉形变而阻值变大;四个应变片在电路连接上构成全桥电路,在其中一对角结点输入激励电压,在另一对角结点会输出相应电压值,且电压值大小与支架承载压力大小成正比;hx711芯片与称重支架中全桥电路之间共四根导线连接,每根导线连接到全桥电路的一个结点;其中两根导线施加电压激励,两根输出测量有效电压值,被hx711芯片采集并进行模数转化;hx711芯片与控制核心的主控芯片之间共两根信号线连接,包含同步时钟线pd_sck和数据线dout,两根信号线连接到主控芯片上任意两个独立的数字io引脚,hx711芯片与主控芯片之间采用hx711芯片私有的数字协议通信。
61.所述测距模块与所述控制核心和物联网模块电连接,所述测距模块安装在垃圾桶盖的中间位置,用于向桶内测距,以监控内桶内的垃圾体积;具体地,内桶多为圆柱形,即在任意高度处内桶的横截面积相同;或圆台形,即内桶截面面积下小上大,且面积变化率恒定。则可以在内桶内垃圾上表面到测距模块的距离h的基础上通过简单的公式计算得到垃圾桶的剩余容量,具体公式依据内桶的形状尺寸而定。由此实现对垃圾桶内垃圾体积的实时监控,提供满桶预警。具体地,测距模块选用tof10120模块,具有体积小,可靠性高等优点。其连接至主控芯片的交互集成电路(i2c)接口上,通过i2c协议与主控芯片进行通讯。
62.所述打印机与控制核心和物联网模块电连接,所述打印机用于打印用户投放垃圾以及清洁人员清理垃圾的凭条;具体地,打印机选用的是优库5820热敏打印机,其被连接至主控芯片的usart外设上,采用usart协议与主控芯片进行通讯。
63.所述指纹识别模块与控制核心和物联网模块电连接,所述指纹识别模块设置在所述外壳的外壁,用于比对开盖时操作人员的身份信息;具体地,指纹识别模块为as608芯片,连接至主控芯片的异步接收/发送器(uart)外设,采用uart协议与主控芯片进行通讯。并提供wak引脚用于唤醒处于低功耗状态下的嵌入式系统。
64.所述自动开盖模块与控制核心和物联网模块电连接,所述自动开盖模块安装于外壳与垃圾桶盖之间的连接轴处,用于根据控制核心的控制自动开关垃圾桶盖;具体地,自动开盖模块包括步进电机,并由7.4v锂电池直接供电,同时其控制线(信号线)连接至主控芯片的定时器外设上。通过定时器外设产生的可调占空比pwm波来控制步进电机的转角方向,进而实现开盖、关盖的过程。
65.所述sd卡模块与控制核心和物联网模块电连接,用于存储待显示的数据与保存嵌入式系统的运行日记;
66.所述触摸显示屏模块与控制核心和物联网模块所述的触摸显示屏模块用于显示嵌入式系统的实时状态与所检测的物理量,同时提供视频播放、二维码显示以及触摸控制的人机交互功能。优选地,触摸显示屏模块选择体积更小,容量更大的tf卡,以方便进行存储空间扩充及播放更多的内容。其连接至主控芯片的sdio接口上,通过主控芯片自带的sdio外设来管理sd卡的读写操作。
67.优选的,每一个模块都有一个与之对应的led工作状态指示灯,在其正常工作时指示灯将被点亮,当其不工作时led灯处于关闭状态。实现提醒维修人员哪里出现故障,方便维修。
68.优选的,锂电池通过一个分压电路连接至主控芯片的adc引脚,利用模拟看门狗(awdg)对电池的电量进行实时检测,以避免电池因过放电、过充电而导致的火灾发生。具体地,在电池正负极两端连接分压电路,并将其接到主控芯片的adc引脚。在程序上,配置模拟看门狗中断,并设定高、低电量报警阈值。adc外设能够不经过cpu,自动检测实时电池电量,并在外设中完成阈值比较。该方法能够在不占用cpu资源的情况下(即不影响系统正常工作),自动完成电池电量的检测。当电池剩余电压不足7v时,adc外设将产生模拟看门狗中断,嵌入式系统在接收到该中断后,首先通过m5310-a模块上报onenet平台低电量警报,并将关键运行数据(医疗废物信息,m5310-a联网情况等)存入4kb备份sram,而后系统将自动掉电进入低功耗模式,以减缓电池耗电速度,保护电池。同时,onenet平台将给相关操作人员手机推送信息,提醒相关人员及时更换锂电池。
69.优选的,嵌入式系统的启动地址由boot引脚指定,boot引脚设置电路如图8所示。在重启主控芯片后系统时钟(sysclk)的第4个上升沿到达时,boot引脚的电平将被锁存,主控芯片据此来设定程序的启动地址。通过设定上电瞬间主控芯片boot引脚的电平高低,可以选择主控芯片从flash、系统存储器,片上sram中启动。在这里,我们选择从flash中启动,故将两个boot引脚连接至地,同时通过一个电阻接至芯片主供电轨(vcc),与引脚内的寄生电容、外部滤波电容c构成一个rc网络,进一步提高在强噪声环境下系统启动的可靠性。boot引脚设置电路如图8所示,不同boot配置下启动地址如表1所示。
70.表1
71.boot1boot0启动地址x0用户flash01系统存储器11内置sram
72.当需要对嵌入式系统进行调试时,可通过调节boot引脚的电平,来从主控芯片存储器不同地址启动,实现对主控芯片的配置(如修改运行代码等)。
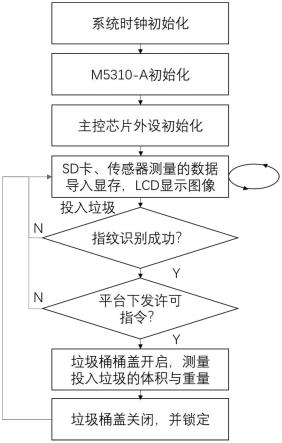
73.在本发明中,嵌入式系统为了更好地进行多个进程的任务管理,使用了实时操作系统(rtos)用于将cpu分配给多个任务。参照图9和图10所示,本实施例将说明系统上电后的嵌入式系统软件工作流程。系统上电后,程序由基地址(0x08000000,位于flash中)处启动,并依次进行如下步骤:
74.第一步,先进行系统时钟配置,选择外部石英晶振hse为时钟源,首先经过15分频,进入主锁相环(main pll),并配置倍频系数为216,再进行时钟2分频,使得系统时钟为180mhz,并进行相应分频后给ahb总线、apb1总线、apb2总线提供时钟信息。这样,主控芯片
所有的外设都得到了相应的时钟源。
75.第二步,初始化与m5310-a模块通讯的usart外设。依次向m5310-a模组发送指令,检查模组是否上电开机成功,接着判断信号质量,并判定模组登陆情况。若模组已登录上onenet平台,则注销模组,再进行下一步操作。接下来,设置模组侧设备注册码,并订阅object资源与resource资源,最后登陆模组。在完成任一操作后,m5310-a模组都会返回ok指令;若某条指令无法完成,则会返回error指令。在操作系统指定的延时时间(10秒)内,若模组一直返回error指令,则认为m5310-a模组故障。这时主控芯片拉低m5310-a芯片的rst引脚100ms以复位该模块,并通过软件自重启;而后重复第一步至第二步,直至完成m5310-a模组初始化过程。m5310-a初始化流程如图10所示。
76.第三步,依次配置通用io口(用于控制led与称重模块),ltdc外设,fmc控制器、实时钟外设、sdio外设、dma2d加速器、spi1外设、adc外设、连接热敏打印机的usart外设、连接指纹识别其的i2c外设,并配置dma与中断,开启实时操作系统等环节。任何一步的初始化过程出现异常都都将返回错误信息,该信息将在全部外设初始化完成后通过m5310-a模块上报onenet平台,提醒设备操作人员及时检查对应模块是否存在故障。设备完成自检后,将进入主gui界面,如图13所示:具有当前废物重量、体积测量,与相关功能的按键。
77.第四步,sd卡中存储的视频(如医疗垃圾如何打包)通过dma通道导入sdram中预先开辟的显存空间,ltdc外设控制lcd屏进行快速刷新,实现视频播放功能。显示屏不间断播放操作指南和宣传视频,用户靠近垃圾桶后可以自主学习智能垃圾桶使用方法与垃圾分类、垃圾管理相关知识;
78.第五步,所有模块初始化完成后,系统进入正常工作模式。可通过主gui界面上的按钮切换工作模式,例如:显示相应的视频(如医疗废弃物密封方法视频)与垃圾的相关参数(重量,体积等)。在实时操作系统的管理下,cpu在不同任务中来回切换,实现了最大化的利用效率。
79.第六步,在操作人员往垃圾桶中投入垃圾前,可通过主gui界面上的按钮切换工作模式,首先利用指纹识别模块进行身份验证。当指纹识别模块捕捉到有效的指纹输入时,暂停视频播放,同时调出认证二维码界面。而后操作人员通过手机扫描二维码,物联网平台下放视频暂停指令。触摸屏上显示垃圾投放报表,用户可以在手机或触摸显示屏上填写医疗废弃物产生的科室与种类等信息。在操作人员填写相应信息后,onenet平台将自动比对数据库内的数据,比对成功将通过m5310-a模组向嵌入式系统下放开盖许可指令。
80.第七步,当且仅当嵌入式系统收到onenet平台下发的许可指令,在满足垃圾桶剩余容量充足、当前垃圾总重量距最大可承载重量满足一定差值且无额外限制开盖的指令情况下,解锁开盖模块,操作人员将该纸条贴在待投入的垃圾袋上。随后,主控芯片开启pwm输出,控制步进电机模块,正转开启垃圾桶的盖子,操作人员往垃圾桶内投入医疗废物。主控芯片将控制称重模块、测距模块对当前桶内垃圾特征进行测量,同时通过nb-iot平台上传本次投入医疗废物的重量与体积。完成后,系统将打印投入医疗废物的科室、时间,及本次投入垃圾的体积与质量,由操作人员将其贴于垃圾上,同时做好垃圾投入的相关记录。
81.第八步,优选的,系统将依据投入垃圾的质量/体积比对投入医疗废物的种类进行粗略判断。若系统判定投入的垃圾种类与此垃圾桶应收集的医疗废物种类不一致(如将针头误投至普通垃圾袋中,将可能扎破垃圾袋,造成医疗废物泄漏),要求操作人员进行确认。
82.第九步,操作人员完成垃圾投放操作后,在触摸显示屏上进行关闭操作。此时步进电机反转,将垃圾桶盖子关闭并上锁,以防止垃圾桶被意外打开,造成医疗废物污染,给医护人员带来安全隐患。
83.作为一种优选方案,本发明提供了许可操作人员信息更新的方法。当需要更新操作许可人员时,首先在触摸显示屏模块上输入管理员认证信息进入管理员模式。而后录入待更新的操作许可人员身份信息(指纹)至sd卡的指纹库文件中。在另一方面,该待更新的操作许可人员信息也需要在后台输入至onenet平台上。物联网平台下放解锁指令、嵌入式系统指纹认证的双重认证方式能够有效降低恶意获取垃圾桶开盖许可的可能性。
84.作为一种优选方案,本发明在嵌入式系统中加入了一个倒计时1小时的定时器。其中,每次操作(触碰触摸屏、投入垃圾等)都将复位定时器的倒计时时长。在无用户进行操作后的一小时内,系统将自动进入低功耗模式。在系统进入低功耗模式前,关键的数据(医疗废物信息,m5310-a联网情况等)被写入4kb备份sram中,使得相关数据在掉电后不会丢失。系统进入低功耗模式后,系统时钟停振,所有外设的时钟都被关闭,以尽可能减少系统的功耗。系统进入低功耗模式后,触碰触摸显示屏将使得触摸屏发出一个中断信号。主控芯片接收到中断信号后将退出低功耗模式,重新给外设提供时钟,重新配置m5310-a模块登录onenet平台,并将存储在4kb备份sram中的数据读出。
85.作为一种优选方案,本发明在嵌入式系统中设计了满桶报警逻辑。当嵌入式系统通过称重模块检测到桶重已经超过设定阈值,或通过激光测距模块检测到目前的废物体积已经超过设定阈值,则嵌入式系统将主动通过m5310-a模块向onenet平台发送满桶警报。onenet平台接收到满桶警报后,将推送到相关操作人员手机上,提醒其及时对该垃圾桶进行清空。
86.作为一种优选方案,本发明投放医疗废物(如针头)时,操作人员先通过扫描二维码、录入科室信息、身份校验,解锁垃圾桶盖子。在操作人员投入垃圾后,嵌入式系统将对本次投入垃圾的重量,体积进行测量,依据投入垃圾的质量/体积比对投入医疗废物的种类进行判断;若判定投入的垃圾种类与此垃圾桶收集的医疗废物种类相一致,则触摸显示屏接收关闭操作,由操作人员在打印机上打印凭条,并将凭条贴至投入垃圾上,做好相关记录。若判定投入的垃圾种类与此垃圾桶收集的医疗废物种类不一致,则触摸显示屏填出确认窗口供操作人员进行确认。如此以避免医疗物品误投入。确认后,则触摸显示屏接收关闭操作,由操作人员在打印机上打印凭条,并将凭条贴至投入垃圾上,做好相关记录。
87.当垃圾桶满桶时,管理人员将会收到满桶信息,联系垃圾转运人员对垃圾桶进行清理。转运人员在转运时将比对垃圾桶实际重量与平台记录的数值,并参考操作人员的操作记录,检查是否出现异常情况(医疗废物丢失或恶意投放等)。随后,根据桶内垃圾的种类、重量、体积等信息,将其转运至相关的处理场所进行集中处理。在垃圾桶清空后,由相关人员对垃圾桶进行消杀作业,避免交叉感染。
88.作为一种优选方案,本发明允许onenet平台主动下发读指令,读取桶内的垃圾信息。嵌入式系统收到onenet平台的读指令后,将控制称重模块,激光测距模块读取当前桶内的垃圾信息,与此时联网的信息一起上报给onenet平台。
89.根据本发明实施例的基于物联网与多模态传感技术的智能垃圾桶及其使用方法的其他构成等以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
90.在本说明书的描述中,参考术语“实施例”、“示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
91.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。