技术特征:
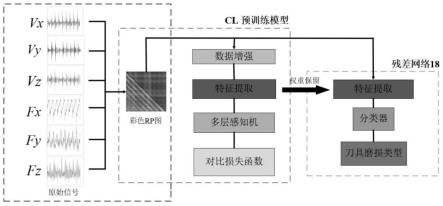
1.一种刀具状态监测方法,其特征在于:包括如下步骤:步骤1、采集刀具加工过程中切削力、振动信号以及对应刀具的磨损状态,获得时间序列样本;所述时间序列样本包括有标签样本和无标签样本,所述有标签样本由刀具加工开始阶段以及结束阶段的切削力、振动信号和刀具磨损状态组成的;所述无标签样本由刀具加工中间阶段的切削力和振动信号组成;步骤2、对时间序列样本进行数据扩维,然后以最小化多尺度排列熵为目标函数,利用智能进化算法进行参数取值并寻优,得到最优重构矩阵;步骤3、对最优重构矩阵进行编码生成灰度距离图;步骤4、将同一样本中的灰度距离图进行对角切割并聚合成彩色距离图;步骤5、将彩色距离图输入到对比学习网络中进行预训练模型的训练,得到特征权重;步骤6、将预训练模型的特征权重调用到resnet18分类模型中并训练,得到训练后的resnet18分类模型;步骤7、利用训练后的resnet18分类模型对刀具状态进行监测识别。2.根据权利要求1所述的刀具状态监测方法,其特征在于:步骤二中,所述数据扩维是先将时间序列样本进行平均化,得到粗粒度时间序列,平均化公式如下:式中:y
i
为粗粒度时间序列,s代表尺度因子,每个粗粒度时间序列的长度等于时间序列样本的长度n除以尺度因子s,x
j
为时间序列样本。3.根据权利要求2所述的刀具状态监测方法,其特征在于:步骤二中,所述最优重构矩阵的获取是将粗粒度时间序列嵌入到嵌入维度为m、时间延迟为t的相空间中,得到相空间的时间状态,如下所示:对y(i)的元素按照实际值升序排列,每个y(i)映射到一个符号数组s(i)=[j1,j2,j3…
j
m
],i=1,2,3
…
k,k≤m!;对于不同符号数组的概率分布为p1,p2,p3…
p
k
,其中[y(i),i=1,2,3
…
k]的概率为k香农熵:对上式进行归一化处理,得到排列熵h=hp(m)/ln(m!);构建最小化多尺度排列熵偏度平方的优化模型:
其中,skew表示所有样本的多尺度排列熵的偏度平方,sk
x
表示x的排列熵偏度,q为样本容量,h
x
表示x的排列熵,h
avg
表示所有q个排列熵的均值;利用智能进化算法求解出使得skew最小的时间序列长度n、尺度因子s、嵌入维度m和时间延迟t,进而构造最优重构矩阵:其中:k=t-(m-1)t。4.根据权利要求3所述的刀具状态监测方法,其特征在于:所述灰度距离图的生成公式如下:rp
i,j
=||y
i-y
j
||;式中:y
i
和y
j
表示最优重构矩阵的i,j个状态,i,j=1,2,
…
k,rp
i,j
表示灰度距离图中坐标的像素值。5.根据权利要求1所述的刀具状态监测方法,其特征在于:所述对比学习网络有数据增强模块、特征提取模块、多层感知机模块和对比损失函数模块组成;所述数据增强模块采用几何变换类的数据增强方法,将彩色距离图生成正样本对和负样本对;所述特征提取模块使用resnet18模型,包括卷积层、四个残差块和平均池层,将输入图像转换为1
×1×
512的特征向量:所述多层感知机模块在将高维向量映射到低维向量,将输入的1
×1×
512的特征向量转换成1
×1×
128的特征向量;所述对比损失函数模块计算余弦相似度:其中:z=[z1;z2]∈r
2n
×
128
,表示矩阵通过列进行合并,z1为正样本对经过特征提取模块和多层感知机模块获得的特征向量;z2为负样本对经过特征提取模块和多层感知机模块获得的特征向量;i,j=1,2,
…
k;再根据余弦相似度计算交叉熵损失:
其中,τ为温度系数τ,τ∈[0,1]分子为正样本对的余弦相似度,分母为所有彩色距离图的余弦相似度之和;最后计算损失函数:6.根据权利要求1所述的刀具状态监测方法,其特征在于:步骤7中,刀具状态进行监测识别是定期周期性采集刀具加工过程中的切削力和振动信,得到待测样本;将待测样本进行扩维、编码和聚合形成待测彩色距离图;将待测彩色距离图输入到训练后的resnet18分类模型中对刀具状态进行分类监测识别。7.根据权利要求1-6任一项所述的刀具状态监测方法的监测装置,其特征在于:包括信号采集模块、图形化模块和状态识别模块;所述信号采集模块采用多个传感器定期采集刀具加工过程的时间序列样本以及待测样本;所述图形化模块将时间序列样本或待测样本进行扩维、编码和聚合形成待测彩色距离图;所述状态识别模块用于将待测彩色距离图输入到训练后的resnet18分类模型中对刀具状态进行分类监测识别。
技术总结
本发明公开了一种刀具状态监测方法及检测装置,包括如下步骤:采集刀具加工过程中切削力、振动信号以及对应刀具的磨损状态,获得时间序列样本;对时间序列样本进行数据扩维,然后以最小化多尺度排列熵为目标函数,利用智能进化算法进行参数取值并寻优,得到最优重构矩阵;对最优重构矩阵进行编码生成灰度距离图;将同一样本中的灰度距离图进行对角切割并聚合成彩色距离图;将彩色距离图输入到对比学习网络中进行预训练模型的训练,得到特征权重;将预训练模型的特征权重调用到Resnet18分类模型中并训练,得到训练后的Resnet18分类模型;利用训练后的Resnet18分类模型对刀具状态进行监测识别。本发明可以实现刀具状态的高精度监测,大大降低了成本。大大降低了成本。大大降低了成本。
技术研发人员:周余庆 王泓澈 孙维方 陈如清 任燕 向家伟
受保护的技术使用者:温州大学
技术研发日:2022.05.06
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。