1.本发明涉及固定到可移动装置上的收放线装置领域,具体涉及一种轻型特种光缆车载式收放线装置的控制方法。
背景技术:
2.轻型特种光缆用于野外、条件严酷恶劣的环境的铺设与光信号传输,并存在经常重复收放使用的情况。轻型特种光缆由于内部具有光纤,其敷设时要求光纤的弯曲半径应至少为光纤外径的15倍,在施工过程中应至少于为20 倍;布放时,缆盘转动应与布放速度同步,光缆出盘处要保持松弛,并保留缓冲的余量,防止光缆的牵拉力超过光缆的允许牵拉力,但是缓冲余量也不宜过多,避免出现缆盘上缠绕的光缆散乱压股,对光缆造成机械损伤,一旦发生会发生光缆破损断裂的情况,现场维修费时费力且需要专用维修工具器材,十分影响工作效率。
3.现有的自动收放缆设备一般都是通过传感器采集运载车辆的速度,根据车辆速度控制缆盘的驱动电机的转速,从而使收放线速度基本与车辆速度保持一致。在一些复杂情况如车辆转弯时或行驶在坑洼路面时,通过传感器测量的车速得出的行驶距离计算值与车辆实际行驶路径长度之间存在误差,当误差累积到一定程度时则会造成布放出的光缆过松或过紧,而不能保持恒定张力。另外,自主收放线装置需要根据地形和使用需求设置在车辆的不同位置,而收放线速度需要与车辆在收放线处的速度相匹配,传感器测得的是车辆固定位置的速度,这样就加剧了光缆收放线速度与车速之间的偏差,像转弯时,如果偏差过大会造成光缆的弯折,对光缆造成难以修复的损伤。
4.特别是在铺设轻型特种光缆时,野外环境地形复杂,车辆运动轨迹也复杂多变,现有技术的光缆收放线装置控制方法对收放线速度的控制不精准,不能灵活适应各种路况和车况,存在过度牵拉和弯折光缆的风险,不能适用于轻型特种光缆在路况复杂情况下的连续敷设。
技术实现要素:
5.本发明所要解决的技术问题是针对现有技术的上述不足,提供一种轻型特种光缆车载式收放线装置的控制方法,能够实现与车辆复杂动作相适应的、精准调节的自主收放线,使光缆不被过度拉伸和弯折。
6.本发明解决上述技术问题的技术方案如下:轻型特种光缆车载式收放线装置的控制方法,其特征在于,所述车载式野战光缆收放线装置包括缠绕单元、张力检测单元、收放单元和控制单元,张力检测单元用于检测缠绕单元与收放单元之间光缆的张力值f;轻型特种光缆车载式收放线装置的控制方法包括以下步骤:获取车辆两个后轮的转速;根据收放单元收放线处在车辆上的位置和两个后轮的转速计算得到收放线处的
移动速度v0;控制收放单元的收放线速度v1,使v1t-v0t=a,其中a为松弛余量,a≥0,t表示时间;获取收放单元的收放线速度v1,同时获取张力值f,根据v1和f控制缠绕单元的收放线速度v2,使张力值f不大于预设值f0。
7.优选的,所述缠绕单元还包括具有排线轮的自动排线装置,轻型特种光缆车载式收放线装置的控制方法还包括:控制排线轮的移动速度与缠绕单元的收放线速度v2相匹配以实现其排线功能。
8.优选的,车辆两个后轮的转速由设置在左后轮的左速度编码器和设置在右后轮的右速度编码器测得。
9.优选的,左速度编码器和右速度编码器电连接至第一控制器,所述移动速度v0由第一控制器计算得到。
10.优选的,所述收放单元由第一伺服电机驱动,第一伺服电机电连接至第一控制器,第一控制器根据移动速度v0控制第一伺服电机的转速从而控制收放线速度v1。
11.优选的,所述张力检测单元包括张力传感器,第二控制器分别与第一控制器和张力传感器电连接,所述缠绕单元由第二伺服电机驱动,第二伺服电机电连接至第二控制器;第二控制器从第一控制器获取收放单元的收放线速度v1,同时获取张力传感器检测到的张力值f,根据v1和f控制缠绕单元的收放线速度v2,使张力值f不大于预设值f0。
12.优选的,所述排线轮由步进电机驱动,步进电机、第二控制器和第一控制器均电连接至plc-触摸屏一体机,plc-触摸屏一体机从第二控制器或第一控制器获取收放线速度v2并调节步进电机的转速v3,使排线轮的移动速度与缠绕单元的收放线速度v2相匹配。
13.本发明的有益效果是:1.本发明通过获取车辆两个后轮的转速,能够得到收放线处的准确移动速度,从而精确控制收放线量,有效保证车辆转弯时光缆不产生弯折、过度牵拉等问题;2.通过获取收放单元的收放线速度v1,同时获取张力值f,根据v1和f控制缠绕单元的收放线速度v2,使张力值f不大于预设值f0。实现收放单元与缠绕单元同步启动,避免了收放线单元瞬间启动对光缆产生的较大拉力;并运用pid算法微调缠绕单元的收放线速度,使光缆的张力力更小,最大程度的保护光缆不受损伤,控制过程智能、精准。
14.3.本发明多个单元的动作相互配合,实现了自主收放线动作与车辆复杂动作相适应,始终使光缆保持适度的松弛状态,保证光缆不受拉伸和弯折损伤。
附图说明
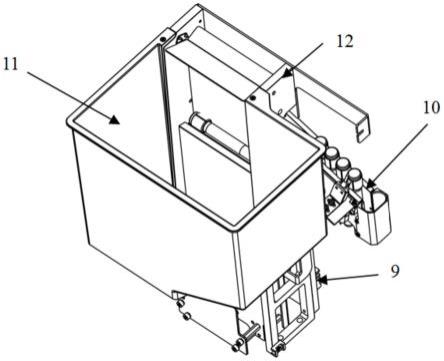
15.图1是本发明一个实施例的结构示意图;图2是本发明另一个实施例的结构示意图;图3是本发明的缠绕单元、张力检测单元和收放单元位置关系及结构示意图;图4是本发明收放单元的结构示意图;图中:1.缠绕单元,2.张力检测单元,3.收放单元,4.左速度编码器,5.右速度编码器,6.第一伺服电机,7.第二伺服电机,8.第一控制器,9.第二控制器,10. plc-触摸屏一体机;30.主动轮,31.从动轮,32.平皮带,33.导向轮。
具体实施方式
16.下面结合附图对本发明的原理和特征进行描述,所举实施例只用于解释本发明,并非用于限定本发明的范围。
17.如图1和图3所示,本实施例的一种轻型特种光缆车载式收放线装置,可灵活搭载在各种车辆上,包括依次设置的缠绕单元1、张力检测单元2、收放单元3,还包括左速度编码器4、右速度编码器5和速度闭环伺服控制系统;所述缠绕单元1包括支架、缆盘和第二伺服电机7,缆盘转动连接在支架上,第二伺服电机7连接至缆盘用于驱动缆盘转动;优选的,所述支架包括固定架和活动架,活动架与固定架之间的间距能够调节,缆盘连接在固定架和活动架之间,这样通过移动活动架调节活动架与固定架之间的距离,可以实现不同长度缆盘的固定和拆卸。本实施例中,所述缠绕单元1还包括往复排线器,所述往复排线器包括步进电机、滚珠丝杠和排线轮总成,排线轮总成设置在滚珠丝杠的螺母上,步进电机用于驱动滚珠丝杠转动,步进电机的转速与第二伺服电机7的转速相配合,以实现自动排线的功能。步进电机用于驱动排线轮总成在滚珠丝杆上做往复运动。当然,还可以采用本领域技术人员熟知的其他结构的往复排线器,比如光杆排线器等进行自动排线。缠绕单元1可以固定不同型号的缆盘,第二伺服电机7正转或反转带动缆盘对光缆进行收卷或者放卷。
18.本实施例中所述张力检测单元2包括张力轮和张力传感器,张力传感器设置在张力轮上。张力轮一般可以高低错落的设置三个,将光缆绕接在张力轮上,张力传感器用于检测张力轮上光缆的张力。
19.所述收放单元3包括主动轮30、至少两个从动轮31、绕接在从动轮31上的平皮带32和第一伺服电机6,主动轮30与平皮带32相互靠近,二者之间用于放置光缆并对光缆产生一定的压紧力以带动光缆移动,第一伺服电机6连接至主动轮30用于驱动主动轮30正转或反转;本实施例中如图4所示,所述收放单元3包括三个呈三角形位置分部于主动轮30左下方的从动轮31,主动轮30通过同步带连接第一伺服电机6,从动轮31通过平皮带32实现与主动轮30之间的联动,还包括若干导向轮33。为防护光缆及增大光缆与传动带摩擦力,主动轮30经特殊加工表面注聚氨酯材料,硬度-a。主动轮30设计凹槽,可使光缆平稳运行,不会滑出轮外,保证顺利收放。
20.使用时,光缆设置在缆盘上,其自由端经过排线轮、绕接在张力轮上,然后经过收放单元3左上方的导向轮33,进入平皮带32与主动轮30之间,经度转向后,再经过收放单元3后下方的另一个导向轮33后放出车外。
21.所述左速度编码器4同轴的连接在车的左后轮上,与左后轮旋转的角度完全一致。右速度编码器5同轴的连接在车的右后轮上,与右后轮旋转的角度完全一致。
22.所述速度闭环伺服控制系统包括电连接在一起的第二控制器9和第一控制器8,第二控制器9还分别与第二伺服电机7和张力传感器电连接,第一控制器8还分别与左速度编码器4、右速度编码器5、第一伺服电机6电连接。往复排线器的步进电机与第二控制器9电连接。
23.根据公式f=t/r可看出其中f为光缆张力,t为缆盘收卷转矩,r为缆盘的收卷半径,随着收放光缆的同时,缆盘上光缆的卷叠的厚度也会发生变化,造成收放卷半径变化,如果能根据卷径变化调整缆盘收卷转矩,即可实现光缆张力恒定。第二伺服电机7可以直接接收
张力传感器信号,读取精度可达.%,采用全闭环转矩模式,通过内部pid算法,精确计算第二伺服电机7输出转矩,从而保证光缆在卷盘上卷绕时,即使卷绕半径变化而自动进行转矩调整,保证光缆张力恒定,大程度上保护光缆,尤其是单芯光缆,多芯光缆等不能有弯折,受外力容易出现故障的光缆等。
24.在作业车辆行进过程中左右后轮在转向过程中,并不能做到完全同步,尤其是转弯过程中,例如,向左转弯的时候,左后轮转过的角度很小,右后轮转弯半径大。第一控制器8可以同时接收左右后轮的转速信号,由于缆盘的出线位置并不是一定完全安装在左右后轮的几何中心的延长线上,那么实际的收放线速度与左右后轮的轮子的转速、出线位置在车体的安装位置等都有关系。将左后轮和右后轮同时装入编码器,一并连接第一控制器8,第一控制器8具有内部编程功能,可以根据各种传动方式进行速度的配比,可以实现与车体完全同步的收放线速度,支持作业车辆的转弯、倒车等各项功能。
25.本实施例使用时,左速度编码器4、右速度编码器5分别检测左车轮转速和右车轮的转速,并将转速数据传送给第一控制器8;第一控制器8接收来自左速度编码器4和右速度编码器5的转速数据,并进行分析处理得到车辆向车辆外收放线处的移动速度v,并根据v控制第一伺服电机6的转速v,使vt-vt=a,a为松弛余量,a≥,t表示时间,同时将数据v传递给第二控制器9;第二控制器9接收第一控制器8传递的数据v,同时接收张力传感器的张力值f,然后根据v、f和预设的张力值f,控制第二伺服电机7的转速v,使张力值f趋近于预设值f。第二控制器9调节步进电机的转速v,使v与v相匹配。
26.在如图2所示的另一个实施例中,与上述结构不同的是,所述速度闭环伺服控制系统还包括plc-触摸屏一体机10,第二控制器9和第一控制器8通过通讯和plc-触摸屏一体机10连接,上述往复排线器的步进电机电连接至plc-触摸屏一体机10。第二控制器9将数据v传递给plc-触摸屏一体机10,plc-触摸屏一体机10根据数据v进行换算后调节步进电机的转速v,使所述第二伺服电机7控制缆盘每旋转一圈,步进电机带动排线轮位移光缆直径距离,实现所述往复排线器均匀的把光缆缠绕至缆盘上。所述plc-触摸屏一体机10还可用于设置、显示第二伺服电机7和第一伺服电机6的各种参数。
27.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。