:
1.本发明涉及医疗康复助力器械技术领域,具体涉及一种自锁可控柔顺膝关节外骨骼装置。
背景技术:
2.下肢外骨骼机器人是一种穿戴在人体外部的人工外骨骼,可以保护人体和提供额外的动力,能帮助操作者完成很多艰巨的任务。膝关节作为外骨骼的重要组成部分,对于实现外骨骼机器人各项辅助功能有着重要的作用,比如机械外骨骼辅助人体行走时需要膝关节装置能够提供一定扭矩和径向支撑力。
3.膝关节外骨骼装置的震动会使穿戴者感到不适,甚至对穿戴者肢体造成伤害,因此,需要膝关节外骨骼装置具有良好的柔顺性,从而提升使用者的穿戴体验。基于套索驱动的膝关节装置可以有效的隔离驱动元件(如电机、液压缸等)与执行机构,从而提高装置整体的灵活性,容易实现远距离传动。
4.在实际使用情况中,有时需要通过套索来驱动膝关节运动进行助力,有时需要将套索与膝关节的运动进行分离,使穿戴者的肢体可以脱离外骨骼装置的束缚进行自由运动,这就要求膝关节外骨骼装置具有受控运动和自由运动两种模式。当需要实现膝关节的受控运动时,即需要将套索与膝关节的运动相互关联;当需要实现膝关节的自由运动时,又需要将膝关节与套索的运动相分离。目前具有以上两种模式的可控膝关节外骨骼装置均需要提供除套索以外的其他驱动机构(命名为模式切换驱动机构)来实现该功能,在膝关节外骨骼装置上设计模式切换驱动机构不仅会增加整机重量,且影响穿戴舒适性。
5.需要说明的是,上述内容属于发明人的技术认知范畴,并不必然构成现有技术。
技术实现要素:
6.本发明的目的在于解决现有技术所存在的问题,提供一种自锁可控柔顺膝关节外骨骼装置,具有结构设计合理、结构紧凑、重量轻、应用灵活、刚度可变、穿戴舒适、无需额外动力实现自由运动模式、驱动模式及两种模式切换等优点。
7.本发明通过采取以下技术方案实现上述目的:
8.一种自锁可控柔顺膝关节外骨骼装置,包括:
9.连接机构,包括安装轴,所述安装轴一端设有侧板a,另一端设有侧板b,所述侧板a和侧板b分别与大腿连接板连接,所述大腿连接板上设有可变刚度套索传动机构,所述安装轴上设有可控自锁机构,所述可变刚度套索传动机构与所述可控自锁机构连接,所述可控自锁机构上设有小腿连接板,所述小腿连接板与安装轴之间设有角度检测机构;
10.所述可变刚度套索传动机构包括可变刚度单元和套索传动单元,所述可变刚度单元安装在大腿连接板一侧,所述套索传动单元包括两根套索和槽轮,所述槽轮上对称设有两凹槽,所述套索上端安装在可变刚度单元上,下端安装在凹槽内,所述槽轮上设有槽轮板;
11.可控自锁机构,包括间隔设置在安装轴上的轴承a和轴承b,所述轴承a上设有内轮a,所述轴承b上设有内轮b,所述内轮a与内轮b间隔设置,所述内轮b远离内轮a的一侧设有所述槽轮,所述槽轮板上沿圆周方向间隔设有多组螺栓,每组螺栓包括间隔设置的两个螺栓,所述螺栓将槽轮板、槽轮、内轮b和内轮a连接在一起同步旋转,所述螺栓上转动设有自锁顶杆,所述自锁顶杆位于内轮a与内轮b之间,所述自锁顶杆上设有腰型孔,所述内轮a上设有轴承c,所述轴承c上设有惰轮,所述惰轮上沿圆周方向间隔设有多组拨动杆,一组拨动杆对应一组螺栓,同一组中的两个拨动杆间距大于同一组中的两个螺栓间距,所述拨动杆穿过腰型孔安装在惰板上,所述惰轮上设有轴承d,所述内轮b上设有轴承e,所述轴承d和轴承e上设有外轮,所述自锁顶杆在螺栓的驱动下实现与外轮接触自锁或脱离,所述内轮a靠近侧板a的一端设有轴承端盖a,所述外轮靠近侧板a的一端设有轴承端盖b,另一端设有小腿连接板,所述侧板a上设有给惰轮施加压力的压力单元。
12.所述侧板a下端设有轴套a,所述侧板b下端设有轴套b,所述安装轴左端固定在轴套a内,右端固定在轴套b内,所述大腿连接板左侧下端设有侧块a,右侧上端设有上侧块b,右侧下端设有下侧块b,所述侧板a安装在侧块a上,所述侧板b安装在下侧块b上。
13.所述压力单元包括设置在侧板a上的弹簧压板,所述弹簧压板上设有压柱,所述侧板a上设有供压柱通过的通孔a,所述压柱穿过通孔a压在惰轮端面上,所述侧板a上设有螺纹孔,所述弹簧压板上设有安装孔,所述安装孔上设有调节压力大小的调节螺钉,所述调节螺钉安装在螺纹孔上。
14.所述安装轴设计成阶梯轴,所述安装轴中心设有通孔b,所述安装轴直径小的一端安装侧板a,另一端安装侧板b。
15.所述内轮a设计成阶梯状,所述内轮a内壁上设有限位圆环a,所述内轮a一端沿圆周方向间隔设有多个用于安装轴承端盖a的螺纹孔a,另一端沿圆周方向间隔设有多组用于安装螺栓的螺纹孔b。
16.所述内轮b内壁上设有限位圆环b,所述内轮b外壁上设有限位圆环c,所述内轮b上沿圆周方向间隔设有多组用于安装螺栓的螺纹通孔。
17.所述外轮内壁上设有对轴承d进行限位的限位圆环d和对轴承e进行限位的限位圆环e,所述外轮一端侧壁上沿圆周方向间隔设有多个用于安装轴承端盖b的螺纹孔c,另一端设有用于安装小腿连接板多个螺纹孔d。
18.所述小腿连接板上端设置成圆形,所述小腿连接板上端设有圆孔,所述小腿连接板上端沿圆周方向间隔设有多个安装孔a,所述安装孔a上设有用于将小腿连接板紧固在外轮上的紧固螺栓。
19.所述角度检测机构包括设置在安装轴内的角位移传感器,所述小腿连接板上设有辅助测量板,所述辅助测量板上设有传感器法兰,所述角位移传感器的转轴安装在传感器法兰上。
20.所述可变刚度单元包括间隔设置在上侧块b上的两弹簧套筒,所述弹簧套筒内设有弹簧a,所述弹簧套筒内设有压缩弹簧a的套筒滑块,所述上侧块b和下侧块b之间竖向设有两导轨,所述导轨上设有滑动轴承,所述滑动轴承安装在夹头上,所述夹头用于夹紧套索,所述滑动轴承与上侧块b之间的导轨上设有弹簧b和弹簧垫圈,所述下侧块b侧壁上间隔设有两个用于提高槽轮包角的滑轮,所述套索分别固定在套筒滑块和夹头上,所述套索下
端安装在槽轮的凹槽上。
21.所述夹头包括安装有滑动轴承的夹头外壳,所述夹头外壳上套设有钢球架,所述钢球架上设有多个用于夹紧套索的钢球,所述夹头外壳底部设有夹头后壳,所述夹头后壳与钢球架之间设有夹头弹簧。
22.本发明采用上述结构,能够带来如下有益效果:
23.(1)通过设计惰轮、拨动杆、自锁顶杆以及压力单元等部件,实现无需额外驱动,依靠套索驱动即可实现膝关节的驱动模式、自由运动模式以及两种模式的自由切换,使得整个膝关节重量更轻,提高穿戴的舒适性。
24.(2)传统的膝关节采用刚性连接,运动不柔顺,很容易给穿戴者带来抖动、迟滞等不良体验,通过设计变刚度单元能够有效隔离驱动元件带来的抖动,具有良好的缓冲作用,进一步提高穿戴舒适性。
25.(3)由于套索下端固定在槽轮的特定位置,使用滑轮来压紧两根套索,使两根套索间的距离缩小,套索在槽轮上的包角变大,这样一来就可以达到增大膝关节的角度活动范围的目的。
附图说明:
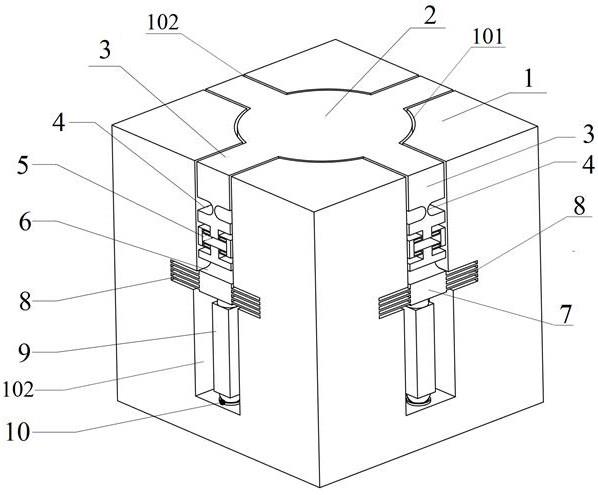
26.图1为本发明膝关节外骨骼装置的结构示意图;
27.图2为本发明膝关节外骨骼装置另一视角的结构示意图;
28.图3为本发明膝关节外骨骼装置的侧视图;
29.图4为图3中的a-a向剖视图;
30.图5为本发明膝关节外骨骼装置的主视图;
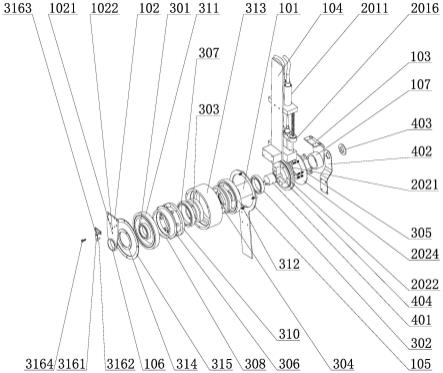
31.图6为本发明膝关节外骨骼装置的爆炸图;
32.图7为本发明连接机构的结构示意图;
33.图8为本发明连接机构的爆炸图;
34.图9为本发明可变刚度套索传动机构的结构示意图;
35.图10为本发明可变刚度套索传动机构另一视角的结构示意图;
36.图11为本发明可变刚度套索传动机构的爆炸图;
37.图12为本发明内轮a、内轮b、槽轮及自锁顶杆的安装示意图;
38.图13为本发明内轮a、内轮b、槽轮及自锁顶杆另一视角的安装示意图;
39.图14为本发明内轮a、内轮b、自锁顶杆及螺栓的安装示意图;
40.图15为本发明内轮a、自锁顶杆和螺栓的安装示意图;
41.图16为本发明内轮b、自锁顶杆、螺栓和槽轮的安装示意图;
42.图17为图16中的结构安装上外轮的结构示意图;
43.图18为本发明惰轮与内轮a及自锁顶杆的安装示意图;
44.图19为本发明内轮a、惰轮、自锁顶杆及螺栓的安装示意图;
45.图20为图19中的结构安装上外轮的结构示意图;
46.图21为本发明内轮a的结构示意图;
47.图22为本发明内轮a另一视角的结构示意图;
48.图23为本发明内轮b的结构示意图;
49.图24为本发明内轮b另一视角的结构示意图;
50.图25为本发明惰轮的结构示意图;
51.图26为本发明惰轮另一视角的结构示意图;
52.图27为本发明外轮的结构示意图;
53.图28为本发明外轮另一视角的结构示意图;
54.图29为本发明小腿连接板的结构示意图;
55.图中,1、连接机构,101、安装轴,1011、通孔b,1012、螺纹孔,102、侧板a,103、侧板b,104、大腿连接板,105、小腿连接板,1051、圆孔,1052、安装孔a,1053、紧固螺栓,106、轴套a,107、轴套b,108、侧块a,109、上侧块b,110、下侧块b,2、可变刚度套索传动机构,201、可变刚度单元,2011、弹簧套筒,2012、弹簧a,2013、套筒滑块,2014、导轨,2015、滑动轴承,2016、夹头,20161、夹头外壳,20162、钢球架,20163、钢球,20164、夹头后壳,20165、夹头弹簧,2017、弹簧b,2018、弹簧垫圈,202、套索传动单元,2021、套索,2022、槽轮,2023、凹槽,2024、槽轮,2025、滑轮,3、可控自锁机构,301、轴承a,302、轴承b,303、内轮a,3031、限位圆环a,3032、螺纹孔a,3033、螺纹孔b,304、内轮b,3041、限位圆环b,3042、限位圆环c,3043、螺纹通孔,305、螺栓,306、自锁顶杆,3061、腰型孔,307、轴承c,308、惰轮,309、拨动杆,310、惰板,311、轴承d,312、轴承e,313、外轮,3131、限位圆环d,3132、限位圆环e,3133、螺纹孔c,3134、螺纹孔d,314、轴承端盖a,315、轴承端盖b,316、压力单元,3161、弹簧压板,3162、压柱,3163、安装孔,3164、调节螺钉,4、角度检测机构,401、角度位移传感器,402、辅助测量板,403、传感器法兰,404、转轴。
具体实施方式:
56.为了更清楚的阐释本发明的整体构思,下面结合说明书附图以示例的方式进行详细说明。
57.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
58.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
59.此外,术语“左侧”、“右侧”、“a”、“b”、“c”、“d”、“e”、“一端”、“另一端”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的位置。
60.在本发明中,除非另有明确的规定和限定,术语“设有”、“设置”、“连接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
61.如图1-29所示,一种自锁可控柔顺膝关节外骨骼装置,包括:
62.连接机构1,包括安装轴101,所述安装轴101一端设有侧板a102,另一端设有侧板b103,所述侧板a102和侧板b103分别与大腿连接板104连接,所述大腿连接板104上设有可变刚度套索传动机构2,所述安装轴101上设有可控自锁机构3,所述可变刚度套索传动机构2与所述可控自锁机构3连接,所述可控自锁机构3上设有小腿连接板105,所述小腿连接板
105与安装轴101之间设有角度检测机构4;
63.所述可变刚度套索传动机构2包括可变刚度单元201和套索传动单元202,所述可变刚度单元201安装在大腿连接板104一侧,所述套索传动单元202包括两根套索2021和槽轮2022,所述槽轮2022上对称设有两凹槽2023,所述套索2021上端安装在可变刚度单元201上,下端安装在凹槽2023内,所述槽轮2022上设有槽轮板2024;
64.可控自锁机构3,包括间隔设置在安装轴101上的轴承a301和轴承b302,所述轴承a301上设有内轮a303,所述轴承b302上设有内轮b304,所述内轮a303与内轮b304间隔设置,所述内轮b304远离内轮a303的一侧设有所述槽轮2022,所述槽轮板2024上沿圆周方向间隔设有多组螺栓,螺栓组可以是两组、三组、四组、五组等,根据实际情况选择,一般优选4组螺栓(即8个螺栓),每组螺栓包括间隔设置的两个螺栓305,所述螺栓305将槽轮板2024、槽轮2022、内轮b304和内轮a303连接在一起同步旋转,所述螺栓305上转动设有自锁顶杆306,所述自锁顶杆306位于内轮a303与内轮b304之间,所述自锁顶杆306上设有腰型孔3061,所述内轮a303上设有轴承c307,所述轴承c307上设有惰轮308,所述惰轮308上沿圆周方向间隔设有多组拨动杆,一组拨动杆对应一组螺栓,同一组中的两个拨动杆309间距大于同一组中的两个螺栓305间距(实现同一组中的两个自锁顶杆夹角为锐角,正反旋转在设定角度内则处于自由运动模式,旋转角度超过设定角度则会自锁进行驱动模式),所述拨动杆309穿过腰型孔3061安装在惰板310上,所述惰轮308上设有轴承d311,所述内轮b304上设有轴承e312,所述轴承d311和轴承e312上设有外轮313,所述自锁顶杆306在螺栓305的驱动下实现与外轮313接触自锁或脱离,所述内轮a303靠近侧板a102的一端设有轴承端盖a314,所述外轮313靠近侧板a102的一端设有轴承端盖b315,另一端设有小腿连接板105,所述侧板a102上设有给惰轮308施加压力的压力单元316。通过设计惰轮308、拨动杆309、自锁顶杆306以及压力单元316等部件,实现无需额外驱动,依靠套索2021驱动即可实现膝关节的驱动模式、自由运动模式以及两种模式的自由切换,使得整个膝关节重量更轻,提高穿戴的舒适性。传统的膝关节采用刚性连接,运动不柔顺,很容易给穿戴者带来抖动、迟滞等不良体验,通过设计变刚度单元201能够有效隔离驱动元件带来的抖动,具有良好的缓冲作用,进一步提高穿戴舒适性。由于套索2021下端固定在槽轮2022的特定位置,使用滑轮2025来压紧两根套索2021,使两根套索2021间的距离缩小,套索2021在槽轮2022上的包角变大,这样一来就可以达到增大膝关节的角度活动范围的目的。
65.所述侧板a102下端设有轴套a106,所述侧板b103下端设有轴套b107,所述安装轴101左端固定在轴套a106内,右端固定在轴套b107内,所述大腿连接板104左侧下端设有侧块a108,右侧上端设有上侧块b109,右侧下端设有下侧块b110,所述侧板a102安装在侧块a108上,所述侧板b103安装在下侧块b110上。通过设计轴套a106和轴套b107确保安装轴101安装牢固可靠,通过设计侧块a108、上侧块b109和下侧块b110,不仅能够实现各部件的精准安装,尤其是便于安装变刚度单元201,而且还提高了整个膝关节的结构强度。
66.所述压力单元316包括设置在侧板a102上的弹簧压板3161,所述弹簧压板3161上设有压柱3162,所述侧板a102上设有供压柱3162通过的通孔a1021,所述压柱3162穿过通孔a1021压在惰轮308端面上,所述侧板a102上设有螺纹孔1022,所述弹簧压板3161上设有安装孔3163,所述安装孔3163上设有调节压力大小的调节螺钉3164,所述调节螺钉3164安装在螺纹孔1022上。压力单元316能够给惰轮308施加摩擦力(该摩擦力能够防止惰轮308随意
旋转),进而确保当自由运动时,惰轮308在压力单元316作用下不会旋转,确保自由运动模式精准可靠;但随着旋转角度增大,自锁顶杆306也会向外轮313内壁靠近,当达到设定角度时自锁顶杆306与外轮313内壁接触实现自锁,进而实现内轮a303、内轮b304、惰轮308和外轮313的同步旋转,即实现驱动模式,在驱动模式运行下套索2021驱动能够克服压力单元316带来的阻力带动惰轮308旋转。
67.所述安装轴101设计成阶梯轴,所述安装轴101中心设有通孔b1011,所述安装轴101直径小的一端安装侧板a102,另一端安装侧板b103。在安装轴101上设计通孔b1011,不仅能够减轻安装轴101的重量,而且还可以实现角位移传感器401的隐藏式安装,使得整体结构更加紧凑,角位移传感器401可以通过螺纹连接的方式安装在通孔b1011内。
68.所述内轮a303设计成阶梯状,所述内轮a303内壁上设有限位圆环a3031,所述内轮a303一端沿圆周方向间隔设有多个用于安装轴承端盖a314的螺纹孔a3032,另一端沿圆周方向间隔设有多组用于安装螺栓305的螺纹孔b3033。实现对轴承a301的限位安装,以及轴承端盖a314和螺栓305的螺纹安装,同时还要便于安装轴承c307和惰轮308。
69.所述内轮b304内壁上设有限位圆环b3041,所述内轮b304外壁上设有限位圆环c3042,所述内轮b304上沿圆周方向间隔设有多组用于安装螺栓305的螺纹通孔3043。对轴承e312进行限位安装,同时实现对螺栓305的螺纹安装。
70.所述外轮313内壁上设有对轴承d311进行限位的限位圆环d3131和对轴承e312进行限位的限位圆环e3132,所述外轮313一端侧壁上沿圆周方向间隔设有多个用于安装轴承端盖b315的螺纹孔c3133,另一端设有用于安装小腿连接板105多个螺纹孔d3134。实现对轴承d311和轴承e312的限位安装,同时便于安装小腿连接板105。
71.所述小腿连接板105上端设置成圆形,所述小腿连接板105上端设有圆孔1051,所述小腿连接板105上端沿圆周方向间隔设有多个安装孔a1052,所述安装孔a1052上设有用于将小腿连接板105紧固在外轮313上的紧固螺栓1053。小腿连接板105采用螺纹连接的方式安装在外轮313侧端面上。
72.所述角度检测机构4包括设置在安装轴101内的角位移传感器401,所述小腿连接板105上设有辅助测量板402,所述辅助测量板402上设有传感器法兰403,所述角位移传感器401的转轴404安装在传感器法兰403上。实现对旋转角度的实时检测,便于掌握膝关节运动状况。
73.所述可变刚度单元201包括间隔设置在上侧块b198上的两弹簧套筒2011,所述弹簧套筒2011内设有弹簧a2012,所述弹簧套筒2011内设有压缩弹簧a2012的套筒滑块2013,所述上侧块b109和下侧块b110之间竖向设有两导轨2014,所述导轨2014上设有滑动轴承2015,所述滑动轴承2015安装在夹头2016上,所述夹头2016用于夹紧套索2021,所述滑动轴承2015与上侧块b109之间的导轨2014上设有弹簧b2017和弹簧垫圈2018,所述下侧块b110侧壁上间隔设有两个用于提高槽轮2022包角的滑轮2025,所述套索2021分别固定在套筒滑块2013和夹头2016上,所述套索2021下端安装在槽轮2022的凹槽2023上。当套索收缩时会压缩弹簧a2012,这样可以隔离一些小幅度高频的抖动,可实现吸震缓冲的作用;在弹簧b2017、夹头2016、导轨2014、滑动轴承2015等组件作用下,当膝关节在转动时弹簧b2017被压缩,因此装置可实现膝关节变刚度的功能,提升装置的穿戴舒适感。
74.所述夹头2016包括安装有滑动轴承2015的夹头外壳20161,所述夹头外壳20161上
套设有钢球架20162,所述钢球架20162上设有多个用于夹紧套索2021的钢球20163,所述夹头外壳20161底部设有夹头后壳20164,所述夹头后壳20164与钢球架20162之间设有夹头弹簧20165。实现沿导轨2014滑动的同时还能夹紧套索2021。
75.本技术的自锁可控柔顺膝关节外骨骼装置的使用说明:
76.使用时,将大腿连接板104与大腿相连,小腿连接板105与小腿相连,将套索2021与电驱动部分连接,这里的电驱动部分(一般包括电源、电机、卷扬机等,人体可以背着电驱动部分)直接采用现有技术即可,电驱动部分不是本发明的重点。当电驱动部分驱动套索2021时,套索2021驱动槽轮2022旋转,槽轮2022旋转通过螺栓305带动内轮a303、内轮b304和其上的自锁顶杆306运转,螺栓305的旋转带动自锁顶杆306运动,同时也会改变自锁顶杆306上端到外轮313内壁的间距,当自锁顶杆306上端与外轮313接触时实现自锁,如槽轮2022继续旋转时自锁顶杆306挤压外轮313,实现外轮313跟随内轮a303和内轮b304一起同步旋转,进而实现驱动模式(也叫助力行走模式),当自锁顶杆306不与外轮313接触时,外轮313不受驱动,外轮313可以自由旋转,即小腿连接板105带动的小腿处于自由运动状态(需要说明的是在自锁顶杆306与外轮313接触前,惰轮308在压力单元316的作用下不会旋转,这样能够确保自由运动的可靠平稳运行,当进行驱动模式又可以克服压力单元316带来的摩擦力使得惰轮308旋转)。
77.上述具体实施方式不能作为对本发明保护范围的限制,对于本技术领域的技术人员来说,对本发明实施方式所做出的任何替代改进或变换均落在本发明的保护范围内。
78.本发明未详述之处,均为本技术领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。