1.本实用新型涉及智能机器人技术领域,更具体地说,本实用新型涉及一种智能送餐机器人用的智能启停机构。
背景技术:
2.随着科技的发展,机械自动化逐步从工业生产进入人们的日常生活中,尤其在餐饮行业,人工进行运输菜品已经逐渐淘汰,已经逐渐使用智能送餐机器人进行运输菜品,智能机器人一次性能运输大量的菜品,非常的方便,且省去了大量的人力来进行运输,但现在智能机器人在工作时有一定缺陷性,例如,现在智能机器人在运输菜品时,都是将菜品放置在载物盘上,且暴露在空气中,有时机器人会因为运输不当,会导致菜品受到污染,且空气中含有大量的细菌,非常的不卫生,其次,一般的智能送餐机器人在对菜品进行运输时,由于会遇到不平坦的路面或者路面过于光滑,会对机器人本身的损坏,缺少对自身较强保护的措施。
技术实现要素:
3.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种智能送餐机器人用的智能启停机构,以解决现在智能机器人在运输菜品时,都是将菜品放置在载物盘上,且暴露在空气中,有时机器人会因为运输不当,会导致菜品受到污染,且空气中含有大量的细菌,非常的不卫生,其次,一般的智能送餐机器人在对菜品进行运输时,由于会遇到不平坦的路面或者路面过于光滑,会对机器人本身的损坏,缺少对自身较强保护的措施的问题。
4.为解决上述技术问题,本实用新型提供如下技术方案:一种智能送餐机器人用的智能启停机构,包括送餐机器人,所述送餐机器人的顶部固定案子有支杆,所述支杆的一侧固定安装有载物箱,所述载物箱的顶部开设有槽口,所述载物箱内腔的底部固定安装有支撑座,所述支撑座的顶部固定安装有电动伸缩杆,所述电动伸缩杆的顶部固定安装有螺纹栓,所述螺纹栓的顶部螺纹安装有手柄,所述手柄的顶部固定安装有载物盘;
5.所述送餐机器人的底部固定安装有减震保护箱,所述减震保护箱的顶部固定安装有海绵板,所述减震保护箱的底部固定安装有限位弹簧,所述限位弹簧的底部固定安装有减震板,所述减震板的底部活动套接有辅助滚轮。
6.其中,所述送餐机器人的左右两侧均固定安装有转动箱,所述转动箱的一侧固定安装有车轮。
7.其中,所述转动箱内腔的一侧固定安装有固定底座,所述固定底座的一侧固定安装有驱动电机,所述驱动电机的上下两侧均固定安装有支撑杆,所述转动箱内壁的上下两侧均固定安装有隔音板,所述驱动电机的一侧活动套接有转杆,所述转杆的一侧固定安装有固定爪。
8.其中,所述送餐机器人的外表面固定安装有操作面板,所述送餐机器人的外表面固定安装有充电孔,所述送餐机器人的外表面固定安装有启动旋钮。
9.其中,所述载物箱的外表面固定安装有观测面罩,其材质为玻璃材料,所述支杆的材质为木质材料。
10.其中,所述车轮的外表面固定套接有条纹棉,所述载物箱的底部固定安装有紧固夹板。
11.其中,所述手柄底部开设有有螺纹凹槽,所述手柄的外表面固定套接有螺纹板。
12.本实用新型的上述技术方案的有益效果如下:
13.上述方案中,现在智能机器人在运输菜品时,都是将菜品放置在载物盘上,且暴露在空气中,有时机器人会因为运输不当,会导致菜品受到污染,且空气中含有大量的细菌,非常的不卫生,此时在设备中增加一个自动托运装置,将菜品放置于载物盘上,当在运输过程中时,电动伸缩杆将载物盘向下收缩至载物箱内,当到达目的地后,电动伸缩杆将载物盘向上伸长至载物箱上,此时顾客可以进行取菜,这样做大大减少了菜品在空气中暴露的时间,非常的卫生;上述方案中,一般的智能送餐机器人在对菜品进行运输时,由于会遇到不平坦的路面,会对机器人本身的损坏,缺少对自身较强保护,此时在设备中增加一个减震保护装置,当机器人在运动过程中遇到不平坦的路面时,减震保护装置的顶部增加一个海绵板,减震保护装置的底部增加一个限位弹簧,并利用辅助滚轮帮助车轮进行运输,这种保护装置使得对机器人的损坏降至最低,大大提高了机器人的使用寿命。
附图说明
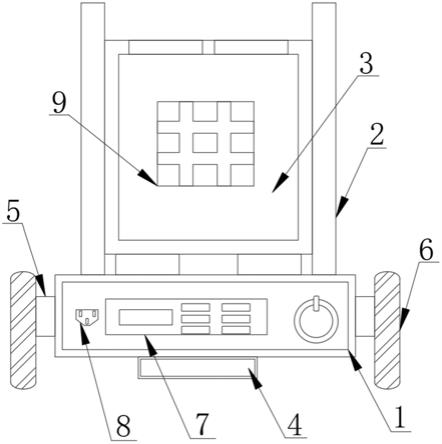
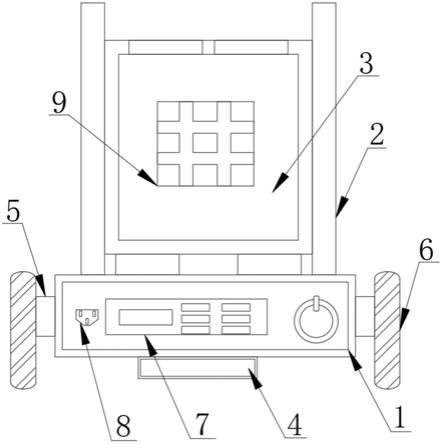
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的载物箱内部结构示意图;
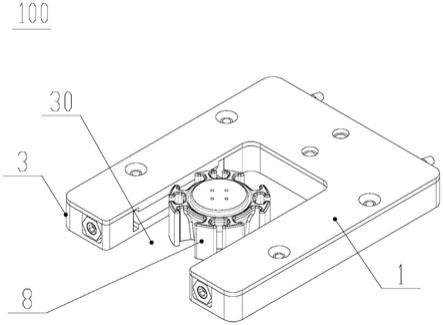
16.图3为本实用新型图1的a处放大结构示意图;
17.图4为本实用新型的减震保护箱整体结构示意图;
18.图5为本实用新型的转动箱内部结构示意图。
19.[附图标记]
[0020]
1、送餐机器人;2、支杆;3、载物箱;4、减震保护箱;5、转动箱;6、车轮;7、操作面板;8、充电孔;9、观测面罩;31、槽口;32、电动伸缩杆;33、支撑座;34、载物盘;35、手柄;36、螺纹栓;41、海绵板;42、辅助滚轮;43、减震板;44、限位弹簧;51、固定底座;52、驱动电机;53、支撑杆;54、隔音板;55、转杆;56、固定爪。
具体实施方式
[0021]
为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0022]
如附图1至附图5本实用新型的实施例提供一种智能送餐机器人用的智能启停机构,包括送餐机器人1,所述送餐机器人1的顶部固定案子有支杆2,所述支杆2的一侧固定安装有载物箱3,所述载物箱3的顶部开设有槽口31,所述载物箱3内腔的底部固定安装有支撑座33,所述支撑座33的顶部固定安装有电动伸缩杆32,所述电动伸缩杆32的顶部固定安装有螺纹栓36,所述螺纹栓36的顶部螺纹安装有手柄35,所述手柄35的顶部固定安装有载物盘34;
[0023]
所述送餐机器人1的底部固定安装有减震保护箱4,所述减震保护箱4的顶部固定
安装有海绵板41,所述减震保护箱4的底部固定安装有限位弹簧44,所述限位弹簧44的底部固定安装有减震板43,所述减震板43的底部活动套接有辅助滚轮42,所述送餐机器人1的左右两侧均固定安装有转动箱5,所述转动箱5的一侧固定安装有车轮6,所述转动箱5内腔的一侧固定安装有固定底座51,所述固定底座51的一侧固定安装有驱动电机52,所述驱动电机52的上下两侧均固定安装有支撑杆53,所述转动箱5内壁的上下两侧均固定安装有隔音板54,所述驱动电机52的一侧活动套接有转杆55,所述转杆55的一侧固定安装有固定爪56,所述送餐机器人1的外表面固定安装有操作面板7,所述送餐机器人1的外表面固定安装有充电孔8,所述送餐机器人1的外表面固定安装有启动旋钮,所述载物箱3的外表面固定安装有观测面罩9,其材质为玻璃材料,所述支杆2的材质为木质材料,所述车轮6的外表面固定套接有条纹棉,所述载物箱3的底部固定安装有紧固夹板,所述手柄35底部开设有有螺纹凹槽,所述手柄35的外表面固定套接有螺纹板。
[0024]
如附图2至附图3,所述送餐机器人1的顶部固定案子有支杆2,所述支杆2的一侧固定安装有载物箱3,所述载物箱3的顶部开设有槽口31,所述载物箱3内腔的底部固定安装有支撑座33,所述支撑座33的顶部固定安装有电动伸缩杆32,所述电动伸缩杆32的顶部固定安装有螺纹栓36,所述螺纹栓36的顶部螺纹安装有手柄35,所述手柄35的顶部固定安装有载物盘34;
[0025]
具体的,当在运输过程中时,电动伸缩杆32将载物盘34向下收缩至载物箱3内,当到达目的地后,电动伸缩杆32将电动伸缩杆32向上伸长至载物箱3上,此时顾客可以进行取菜,这样做大大减少了菜品在空气中暴露的时间,非常的卫生,当菜盘过大时,此时手拿手柄35进行旋转,从而进行更换载物盘34。
[0026]
如附图4至附图5,所述送餐机器人1的底部固定安装有减震保护箱4,所述减震保护箱4的顶部固定安装有海绵板41,所述减震保护箱4的底部固定安装有限位弹簧44,所述限位弹簧44的底部固定安装有减震板43,所述减震板43的底部活动套接有辅助滚轮42,所述送餐机器人1的左右两侧均固定安装有转动箱5,所述转动箱5的一侧固定安装有车轮6,所述转动箱5内腔的一侧固定安装有固定底座51,所述固定底座51的一侧固定安装有驱动电机52,所述驱动电机52的上下两侧均固定安装有支撑杆53,所述转动箱5内壁的上下两侧均固定安装有隔音板54,所述驱动电机52的一侧活动套接有转杆55,所述转杆55的一侧固定安装有固定爪56,所述送餐机器人1的外表面固定安装有操作面板7,所述送餐机器人1的外表面固定安装有充电孔8,所述送餐机器人1的外表面固定安装有启动旋钮,所述载物箱3的外表面固定安装有观测面罩9;
[0027]
具体的,当机器人在运动过程中遇到不平坦的路面时,减震保护箱4开始工作,减震保护箱4的顶部增加一个海绵板41,减震保护箱4的底部增加一个限位弹簧44,并利用辅助滚轮42帮助车轮6进行运输,这种保护装置使得对机器人的损坏降至最低,大大提高了机器人的使用寿命,驱动电机52的转动带动转杆55的转动,转杆55转动带动车轮6向前移动。
[0028]
其中电动伸缩杆32的品牌为五金,且它的型号为xtl100,驱动电机52的品牌为玉豹,且它的型号为yl。
[0029]
本实用新型的工作过程如下:
[0030]
当在运输过程中时,电动伸缩杆32将载物盘34向下收缩至载物箱3内,当到达目的地后,电动伸缩杆32将电动伸缩杆32向上伸长至载物箱3上,此时顾客可以进行取菜,这样
做大大减少了菜品在空气中暴露的时间,非常的卫生,当菜盘过大时,此时手拿手柄35进行旋转,从而进行更换载物盘34,当机器人在运动过程中遇到不平坦的路面时,减震保护箱4开始工作,减震保护箱4的顶部增加一个海绵板41,减震保护箱4的底部增加一个限位弹簧44,当不平坦路面过去后,限位弹簧44伸长至原来的长度,并利用辅助滚轮42帮助车轮6进行运输,这种保护装置使得对机器人的损坏降至最低,大大提高了机器人的使用寿命,驱动电机52的转动带动转杆55的转动,转杆55转动带动车轮6向前移动。
[0031]
上述方案,手柄35、螺纹栓36、电动伸缩杆32的相互配合,当在运输过程中时,电动伸缩杆32将载物盘34向下收缩至载物箱3内,当到达目的地后,电动伸缩杆32将电动伸缩杆32向上伸长至载物箱3上,此时顾客可以进行取菜,这样做大大减少了菜品在空气中暴露的时间,其次,辅助滚轮42、限位弹簧44、海绵板41的相互配合,当机器人在运动过程中遇到不平坦的路面时,减震保护箱4开始工作,减震保护箱4的顶部增加一个海绵板41,减震保护箱4的底部增加一个限位弹簧44,当不平坦路面过去后,限位弹簧44伸长至原来的长度,并利用辅助滚轮42帮助车轮6进行运输,这种保护装置使得对机器人的损坏降至最低,大大提高了机器人的使用寿命。
[0032]
最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
[0033]
其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
[0034]
最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。