1.本实用新型属于自动化生产领域,尤其涉及一种导轨系统及机械手臂装置。
背景技术:
2.柔性送料器主要用作不规则微型精密零件的供料、排列和上料工作,广泛应用于汽车零部件、3c电子、航天军工、5g/芯片半导体、医疗等精密制造行业。由于行业的广泛性,所供物料也各不相同,因此,柔性送料器通常协同机械手臂装置以拾取送料盘上的物料。
3.机械手臂装置通常需要在x轴、y轴、z轴方向移动,将拾取的物料移动到目标位置。现有的机械手臂装置要实现x轴、y轴、z轴方向上移动,往往存在结构复杂、制造成本高的问题。
4.有鉴于此,需要提出一种新的导轨系统,能够实现多个方向上移动,且具有结构简单、制造成本低的优势。
技术实现要素:
5.本实用新型的目的在于提供一种导轨系统及机械手臂装置,导轨系统能够实现工作端在多个方向上移动,同时具有驱动结构简单,制造成本低的优势。
6.为解决上述问题,本实用新型技术方案提供了一种导轨系统,所述导轨系统包括:导轨单元,所述导轨单元包括导轨座和设置于所述导轨座内部的直线型齿条;第一滑块单元和第二滑块单元,所述第一滑块单元和所述第二滑块单元均包括滑动座和设置于所述滑动座上的主齿轮,所述主齿轮均与所述齿条啮合,且所述主齿轮均沿着所述齿条移动使得所述滑动座均与所述导轨座滑动连接;以及第一连杆和第二连杆,所述第一连杆的第一端枢转连接于所述第一滑块单元的所述滑动座,所述第二连杆的第一端枢转连接于所述第二滑块单元的所述滑动座;其中,所述第一连杆的第二端与所述第二连杆的第二端枢转连接形成工作端;所述主齿轮沿着所述齿条移动使得所述第一滑块单元和所述第二滑块单元相互靠近或者远离,带动所述工作端到达目标位置。
7.作为可选的技术方案,所述第一滑块单元和所述第二滑块单元均包括动力装置,所述动力装置均设置于对应的所述滑动座的内腔中,所述动力装置均具有输出轴,所述输出轴输出所述动力装置的驱动力以使对应的所述主齿轮转动并沿着所述齿条移动。
8.作为可选的技术方案,所述动力装置均还包括辅助齿轮,所述辅助齿轮包括相互啮合的主动齿轮和第一从动齿轮,所述主动齿轮连接于所述输出轴;所述主齿轮均包括第一主齿轮,所述第一从动齿轮和所述第一主齿轮同轴设置;其中,所述输出轴驱动所述主动齿轮转动并使得所述第一从动齿轮转动,进而带动所述第一主齿轮转动。
9.作为可选的技术方案,所述辅助齿轮还包括第一波形弹片;所述第一从动齿轮包括第一轮盘,所述第一轮盘上设有第一凹陷;所述第一波形弹片设置于所述第一凹陷中并弹性抵靠所述第一凹陷的内侧壁。
10.作为可选的技术方案,所述辅助齿轮还包括第二从动齿轮,所述第二从动齿轮与
所述主动齿轮啮合;所述主齿轮均还包括第二主齿轮,所述第二主齿轮和所述第二从动齿轮同轴设置;其中,所述主动齿轮转动并使得所述第二从动齿轮转动,进而带动所述第二主齿轮转动。
11.作为可选的技术方案,所述辅助齿轮还包括第二波形弹片;所述第二从动齿轮包括第二轮盘,所述第二轮盘上设有第二凹陷;所述第二波形弹片设置于所述第二凹陷中并弹性抵靠所述第二凹陷的内侧壁。
12.作为可选的技术方案,所述导轨单元还包括条形凸部,所述条形凸部设置于所述导轨座内部,且所述条形凸部和所述齿条相对且平行设置;所述滑动座均还包括滑槽;所述条形凸部插入所述滑槽中,所述滑槽均沿着所述条形凸部滑动。
13.作为可选的技术方案,所述主齿轮均设置于所述条形凸部和所述齿条之间,所述输出轴均垂直于所述齿条和所述条形凸部。
14.作为可选的技术方案,所述导轨座包括底板和设置于所述底板周边的侧板,所述底板和所述侧板共同限定出滑动空间,所述滑动座均容置于所述滑动空间中;其中,所述导轨座还包括防尘罩和支架,所述防尘罩遮盖于所述滑动空间的一侧且与所述底板相对,所述支架设置于所述底板远离所述防尘罩的一侧。
15.本实用新型还提供一种机械手臂装置,包括如上所述的导轨系统。
16.与现有技术相比,导轨单元采用直线型齿条结构,滑块单元采用齿轮结构,齿轮沿着齿条移动,以使得与滑块单元枢转连接的第一连杆和第二连杆的工作端的位置变化,实现导轨系统在多个方向上的位置调节。其中,齿条和齿轮的配合有助于实现导轨系统的制作成本降低。
17.以下结合附图和具体实施例对本实用新型进行详细描述,但不作为对本实用新型的限定。
附图说明
18.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
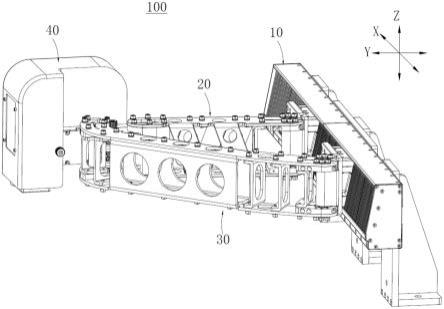
19.图1为本实用新型一实施例中的导轨系统的示意图。
20.图2为图1中导轨系统另一视角的示意图。
21.图3为图1中导轨系统的分解示意图。
22.图4为图1中导轨系统隐藏部分结构的示意图。
23.图5为图4中虚线处的放大示意图。
24.图6为图3中第一滑块单元或第二滑块单元的示意图。
25.图7为图6中第一滑块单元或第二滑块单元的分解示意图。
26.图8为图6中第一滑块单元或第二滑块单元的剖面示意图。
27.图9为图1中导轨系统的连杆和拾取单元的示意图。
28.图10为图9中连杆和拾取单元的分解示意图。
29.图11为拾取部的示意图。
30.图12为图11中拾取单元于一视角的剖面示意图。
31.图13为图11中拾取单元于另一视角的剖面示意图。
32.图14为图11中拾取单元移除外壳后于一视角的示意图。
33.图15为图11中拾取单元移除外壳后于另一视角的示意图
34.图16为图1中导轨系统的工作端的工作区间的示意图。
具体实施方式
35.为了使本实用新型的目的、技术方案及优点更加清楚明白,下面结合实施例及附图,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
36.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
37.如图1至图10所示,本实用新型提供一种导轨系统100,其包括导轨单元10、第一滑块单元14、第二滑块单元14’、第一连杆20和第二连杆30,导轨单元10包括导轨座11和设置于导轨座11内部的直线型齿条12;第一滑块单元14和第二滑块单元14’分别包括滑动座140和设置滑动座140上的主齿轮142,主齿轮142均与齿条12啮合,且主齿轮142均沿着齿条12移动使得滑动座140与导轨座11滑动连接;第一连杆20的第一端211枢转连接于第一滑块单元14的滑动座140,第二连杆30的第一端枢转连接于第二滑块单元14’的滑动座140;其中,第一连杆20的第二端和第二连杆30的第二端枢转连接形成工作端101;主齿轮142沿着齿条12移动使得第一滑块单元14和第二滑块单元14’相互靠近或者远离,带动工作端101到达目标位置。
38.本实施例中,第一滑块单元14和第二滑块单元14’具有相同的驱动机构,均是利用主齿轮142在齿条12上移动,实现第一滑块单元14和第二滑块单元14’在x轴方向上的移动;由于第一滑块单元14和第一连杆20枢转连接,第二滑块单元14’和第二连杆30枢转连接,因此,第一滑块单元14和第二滑块单元14’在x轴方向上的移动,包括相互靠近或者相互远离,带动第一连杆20的第二端和第二连杆30的第二端枢转连接形成的工作端101在x轴和y轴平面上的位置改变。其中,工作端101在y轴方向上的位置改变可视作,工作端101靠近或者远离导轨单元10。
39.如图16所示,第一连杆20的第一端和第二连杆30的第一端分别在第一滑块单元14和第二滑块单元14’的带动下从导轨单元10的一端向另一端移动的过程中,第一连杆20的第二端和第二连杆30的第二端之间的夹角α越小,工作端101移动覆盖的工作区域s的面积越大;第一连杆20的第二端和第二连杆30的第二端之间的夹角α越大,工作端101移动覆盖的工作区域s的面积越小。
40.另外,导轨系统100中,工作端101设有拾取单元40,拾取单元40用于实现导轨系统100在z轴方向上的移动和旋转操作。
41.在本实用新型一实施例中,可将多个导轨座11沿着x轴方向拼接设置,形成更长的导轨单元,适应不同的应用场景。其中,多个导轨座11拼接设置时,其上的第一滑块单元14、
第二滑块单元14’、第一连杆20和第二连杆30构成一个整体可依据实际需求设置。
42.如图3、图5至图8所示,第一滑块单元14和第二滑块单元14’的结构相同,以下以第一滑块单元14为例详细说明其具体结构。
43.如图5至图8所示,第一滑块单元14包括滑动座140和动力装置141,滑动座140包括连接表面1401、内腔1403和滑槽1402,连接表面1401和滑槽1402相对设置,且位于内腔1403的前侧和后侧(以y轴方向为参照);动力装置141容置于内腔1403中。
44.动力装置141具有输出轴1411,输出轴1411用以输出动力装置141的驱动力使得主齿轮142转动并沿着齿条12移动。其中,主齿轮142沿着齿条12移动使得滑动座140在导轨座11内滑动。
45.本实施例中,动力装置141的输出轴1411输出的驱动力通过辅助齿轮143传递至主动齿轮1431上,但不以此为限。在本实用新型的其他实施例中,动力装置的输出轴的端部设置主齿轮,主齿轮直接被输出轴驱动,并沿着齿条移动。
46.辅助齿轮143包括主动齿轮1431和第一从动齿轮1432,主动齿轮1431设置于输出轴1411的端部,主动齿轮1431啮合第一从动齿轮1432,第一从动齿轮1432和主齿轮142同轴设置。其中,输出轴1411输出的驱动力经主动齿轮1431和第一从动齿轮1432减速处理后传导至主齿轮142上,可使得第一滑块单元14的滑动过程更加精准可控。
47.较佳的,第一滑动单元14中主齿轮142的数量为两个,例如为第一主齿轮142和第二主齿轮142,其中,第一主齿轮142和第一从动齿轮1432同轴设置。双主齿轮142的结构,使得滑块单元的整体结构配置较为对称,可获得更流畅的滑动效果。
48.而,辅助齿轮143还包括第二从动齿轮1433,第二从动齿轮1433啮合主动齿轮1431,第二从动齿轮1433和第一从动齿轮1432分别位于主齿轮142的两侧,其中,第二从动齿轮1433和第二主齿轮142同轴设置。
49.上述同轴设置是指,第一主齿轮142和第一从动齿轮1432的同轴转动;第二主齿轮142和第二从动齿轮1433同轴转动。
50.在一较佳的实施方式中,主动齿轮1431、第一从动齿轮1432和第二从动齿轮1433分别为圆柱齿轮;第一主齿轮142和第二主齿轮142分别为摆线齿轮。齿条12例如是直齿齿条。
51.其中,直齿齿条和摆线齿轮均为常见的传动结构,容易加工制作,因此导轨系统100的制作成本降低。另外,摆线齿轮具有传动稳定、传动精度高的优势,有助于使得工作端101移动精度提升。
52.需要说明的是,第一滑块单元14和第二滑块单元14’结构相同,控制第一滑块单元14内的输出轴1411的转动方向和第二滑块单元14’内的输出轴1411’的转动方向相反,使得第一滑块单元14的滑动方向和第二滑块单元14’的滑动方向相反,实现第一滑块单元14和第二滑块单元14’的相互靠近或者远离。
53.另外,控制第一滑块单元14内的输出轴1411的转动方向和第二滑块单元14’内的输出轴1411’的转动方向相同,使得第一滑块单元14的滑动方向和第二滑块单元14’的滑动方向相同,实现第一滑块单元14和第二滑块单元14’在导轨座11上向相同的方向移动。
54.如图8所示,还包括设置弹性件,弹性件提供弹性力迫使第一从动齿轮1432、第二从动齿轮1433分别和主动齿轮1431紧密啮合,消除因主动齿轮1431转动而与第一从动齿轮
1432、第二从动齿轮1433产生的间隙。
55.具体来讲,第一从动齿轮1432包括第一轮盘1434,第一轮盘1434上设有第一凹陷,第一波形弹片144设置于第一凹陷中,第一波形弹片144提供弹性力作用于内侧壁,消除主动齿轮1431转动时,其与第一从动齿轮1432之间的间隙。
56.较佳的,第一凹部的内侧壁的形状与第一波形弹片144的形状相互适配,例如均是波浪形状。
57.第二从动齿轮1433包括第二轮盘1435,第二轮盘1435上设有第二凹陷,第二波形弹片145设置于第二凹陷中,第二波形弹片145提供弹性力作用于第二凹陷的内侧壁,消除主动齿轮1431转动时,其与第二从动齿轮1433之间的间隙。
58.较佳的,第二凹部的内侧壁的形状与第二波形弹片145的形状相互适配,例如均是波浪形状。
59.如图5、图6和图7所示,滑动座140还包括端盖1404,端盖1404包括开孔1405,其中,第一主齿轮142和第二主齿轮142分别自对应的开孔1405中穿出,得以与齿条12相互啮合。
60.如图3至图5所示,导轨座11提供滑动空间111,滑动座140容置于滑动空间111中。导轨座11包括底板112和设置于底板112周边的侧板113,底板112和侧板113共同限定出滑动空间111。
61.齿条12设置于侧板113的一侧边;条形凸部13设置于侧板113相对的另一侧边;其中,齿条12和条形凸部13分别平行于导轨座11的长度方向延伸。
62.如图5和图7所示,动力装置141的输出轴1411垂直于齿条12,主齿轮142被限制于齿条12和条形凸部13之间。
63.进一步,滑动座140上的滑槽1402和条形凸部13相互结合,滑动座140在导轨座11的滑动空间111中滑动时,滑槽1402沿着条形凸部13移动,提升滑动座140的滑动稳定性和顺畅程度。
64.本实施例中,滑槽1402还包括配合凸块a;条形凸部13还包括配合凹槽b;其中,配合凸块a插入配合凹槽b中提升滑槽1402和条形凸部13结合的稳定程度。
65.如图1至图3所示,导轨单元10还包括防尘罩15和支架16,其中,防尘罩15覆盖于滑动空间111的一侧,且与底板112相对;支架16设置于底板112的外侧,即,支架16设置于底板112远离防尘罩15的一侧。另外,支架16与底板112采用锁附连接。
66.其中,防尘罩15设置于滑动空间111和底板112相对的一侧,使得导轨系统100能够应用于无尘车间或者洁净度需求高的生产车间。
67.如图1、图2、图3、图9和图10所示,第一连杆20的第一端和第一滑块单元14枢转连接;第二连杆30的第一端和第二滑块单元14’枢转连接。
68.具体来讲,第一连杆20包括第一区段21、第二区段22和第一枢转单元23,第一区段21包括相对的第一端211和第二端212;第一端211与第一枢转单元23枢转连接,例如,第一端211设置第一枢转孔2111,第一枢转单元23设置第一枢转轴231,第一枢转轴231插入第一枢转孔2111中,第一枢转孔2111绕着第一枢转轴231转动,使得第一区段21相对第一枢转单元23转动。其中,第一区段21的第一端211可视作第一连杆20的第一端。
69.第一枢转单元23还包括第一固定座232,第一固定座232例如通过螺丝锁付固定于第一滑块单元14的滑动座140的连接表面1401上。其中,第一固定座232和第一枢转轴231固
定连接,较佳的,第一枢转轴231设置于第一固定座232的一侧边处。
70.本实施例中,第一枢转轴231沿着z轴方向设置,与第一滑块单元14中的动力装置141的输出轴1411平行,即,第一枢转轴231的轴向方向和输出轴1411的轴向方向相同。其中,第一区段21的第一端211于z轴方向枢转,使得第一连杆20的第二端和第二连杆30的第二端枢转连接形成的工作端101在x轴、y轴平面上的位置发生改变。
71.如图10所示,第二区段22和第一区段21的第二端212固定连接,第二区段22远离第二端212的端部设置第二枢转轴221,第二枢转轴221用于和第二连杆30枢转连接形成工作端101。其中,第二区段22远离第二端212的端部可视作第一连杆20的第二端。
72.第二区段22朝向拾取单元40突出,且第二区段22的宽度(x轴方向)朝向拾取单元40逐渐收窄,大致呈锥形结构。其中,第二区段22还包括竖向侧壁(未图示),竖向侧壁与拾取单元40的外壳410的安装表面411贴合,并通过锁附方式固定连接。
73.另外,第一连杆20的第一区段21例如是采用金属材料制作,为金属连杆结构,而第二区段22例如是选自塑料材料制作,为塑料连杆结构,其中,相互独立的第一区段21和第二区段22有助于降低第一连杆20的制作成本。
74.继续参照图10,第一区段21为直线型结构,其包括相对设置的上侧板体213和下侧板体214,上侧板体213朝向下侧板体214突出l型连接结构215,下侧板体214朝向上侧板体213突出另一l型连接结构216,通过l型连接结构215、216使得上侧板体213和下侧板体214锁附固定。其中,上侧板体213、下侧板体214之间限定出的空间可用于布置导轨系统100的电气走线(未图示)。这种拼接形成的中空结构的第一区段21同样有助于降低第一连杆20制作难度。
75.第一区段21在第一端211处还有垫片24,垫片24的数量为两个,分别固定于上侧板体213的下侧表面以及下侧板体214的上侧表面上;垫片24上设有贯孔,贯孔与第一枢转孔2111相对应,用于提高第一区段21相对第一枢转单元23的枢转稳定性。
76.第二连杆30的两端分别朝向第一连杆20突出,使得第二连杆30为c型结构。具体来讲,第二连杆30包括中间区段31和连接于中间区段31相对两端的第三区段32和第四区段34,中间区段31为直线型结构;第三区段32和第四区段34分别为弧形结构使得第二连杆30大致为c型结构。
77.在一较佳的实施方式中,中间区段31、第三区段32和第四区段34一体成型构成上述第二连杆30。
78.与第一连杆20相似的,第二连杆30也包括相对设置的上侧板体301和下侧板体302,上侧板体301对应于中间区段31的部分具有朝向下侧板体302突出的l型连接结构303,下侧板体302对应于中间区段31的部分具有朝向上侧板体301突出的l型连接结构304,通过l型连接结构303、304使得上侧板体301和下侧板体302各自对应于中间区段31的部分锁附固定。
79.另外,上侧板体301和下侧板体302之间还设置多个支撑件36,支撑件36为u型结构,u型结构两个侧边分别连接上侧板体301和下侧板体302各自对应于第三区段32部分,以及,上侧板体301和下侧板体302各自对应于第四区段34部分。
80.另外u型结构的底部采用镂空设计,其与上侧板体301和下侧板体302限定的空间连通,便于电气走线在第二连杆30内的布置。
81.第二连杆30的第三区段32朝向第一连杆20的第二区段22弯曲的端部设有第二枢转孔321,第二枢转轴221插入第二枢转孔321中,形成工作端101。其中,第三区段32朝向第一连杆20的第二区段22弯曲的端部可视作第二连杆30的第二端。
82.本实施例中,第二枢转轴221和第二枢转孔321之间相对转动,以使第一连杆20的第二端和第二连杆30的第二端之间的夹角α的角度变大或者变小。
83.如图10所示,第二连杆30还包括第二枢转单元33,第二枢转单元33和第四区段34的端部341枢转连接;例如,第四区段34的端部341设置第三枢转孔3411;第二枢转单元33设置第三枢转轴331,第三枢转轴331插入第三枢转孔3411中,第三枢转孔3411绕着第三枢转轴331转动,使得第四区段34相对第二枢转单元33转动。其中,第四区段34的端部341可视作第二连杆30的第一端。
84.相似的,第二枢转单元33还包括第二固定座332,第二固定座332例如通过螺丝锁付固定于第二滑块单元14’的滑动座140的连接表面1401上。其中,第二固定座332和第三枢转轴331固定连接,较佳的,第三枢转轴331设置于第二固定座332的一侧边处。
85.本实施例中,第三枢转轴331沿着z轴方向延伸,与第二滑块单元14’的动力装置141的输出轴1411’、第一枢转轴231以及第二枢转轴221分别平行。其中,第四区段34的端部341于z轴方向枢转,使得第一连杆20的第二端和第二连杆30的第二端枢转连接形成的工作端101在x轴、y轴平面上的位置发生改变。
86.结合图1至图10,第一滑块单元14沿着导轨单元10的导轨座11滑动,第一连杆20的第一端相对第一枢转轴231枢转,第一连杆20的第二端的第二枢转轴221相对第二连杆30的第二端的第二枢转孔321转动;和/或,第二滑块单元14’沿着导轨单元10的导轨座11滑动,第二连杆30的第一端相对第三枢转轴331枢转,第二连杆30的第二端的第二枢转孔321相对第一连杆20的第二端的第二枢转轴221转动;使得第一连杆20的第二端和第二连杆30的第二端之间的夹角α的角度变大或者变小,进而工作端101在x轴、y轴平面上的位置发生改变,实现工作端101在x轴、y轴方向上的位置变化。
87.导轨系统100中,第一连杆20和第二连杆30装配后,大致呈“人”字结构。其中,第一连杆20的长度小于第二连杆30的长度,且第二连杆30的两端弯曲呈弧形,使得第一连杆20和第二连杆30枢转连接形成的工作端101的工作区域s的面积更大。另外,第二连杆30的两端弯曲呈弧形还可以避免枢转过程中,较长的第二连杆30和较短的第一连杆20发生干涉,导致工作端101的工作区域s的面积变小。
88.如图1至图13所示,第一连杆20的第二端和第二连杆30的第二端枢转连接形成的工作端101处设置拾取单元40,拾取单元40通过外壳410的安装表面411与第一连杆20的第二区段22的竖向侧壁固定连接。
89.如图11至图13所示,拾取单元40包括外壳410、拾取端420、驱动机构430、制动装置440和齿条450,外壳410包括收纳腔412,收纳腔412的一侧设有开口413;拾取端420、驱动机构430、制动装置440和齿条450分别收纳于收纳腔412中,拾取端420部分自开口413中伸出;驱动机构430包括驱动电机431和连接于驱动电机431的动力轴4311上的驱动齿轮432;制动装置440设置于驱动齿轮432的另一侧,且连接于驱动电机431的动力轴4311;齿条450沿着z轴方向延伸与驱动齿轮432啮合连接,齿条450与拾取端420固定连接。
90.本实施例中,驱动电机431驱动动力轴4311转动,带动驱动齿轮432转动,使得齿条
450在z轴方向上移动,带动拾取端420在z轴方向上移动,拾取端420从开口413中伸出拾取供料,并于供料结束后反向移动收纳于收纳腔412中。
91.在一较佳的实施方式中,拾取端420还可以包括转接结构,转接结构与其他的拾取装置装配,以适应不同供料场景。
92.在一较佳的实施方式中,驱动齿轮432例如是摆线齿轮;齿条450例如是直条形齿条。
93.如图13、图14和图15所示,拾取单元40还包括安装基座460,安装基座460上一体式排布有驱动机构430和制动装置440,驱动机构430的驱动电机431和驱动齿轮432排布于安装基座460相对的两侧,其中,安装基座460包括贯孔,驱动电机431的动力轴4311穿过贯孔与驱动齿轮432连接。制动装置440和驱动齿轮432位于安装基座460的同一侧,且动力轴4311和制动装置440相连接。
94.本实施例中,驱动齿轮432位于安装基座460和制动装置440之间。
95.制动装置440包括抱刹结构(未图示),抱刹结构抱紧动力轴4311时,动力轴4311不再转动,进而驱动齿轮432被制动,此时,齿条450在z轴方向不发生移动。其中,抱刹结构可采用现有的电磁抱刹结构,即,驱动电机通电时,电磁抱刹结构通电吸合,随着驱动电机的输出轴转动;驱动电机断电时,电磁抱刹结构断电,抱刹通过弹簧的作用抱住输出轴,输出轴停止转动,使得齿轮和齿条被制动。
96.本实施例中,在安装基座460上排布驱动机构430和制动装置440,使其形成一个装配体,再通过装配体与拾取端420、齿条450进行装配,能够有效提升拾取单元40的组装效率,降低组装难度。
97.如图14和图15所示,齿条450朝向安装基座460一侧设有第一滑动部451,例如,滑块;安装基座460设有第二滑动部461,例如,滑槽;其中,第一滑动部451在第二滑动部461中滑动,两者滑动连接,增加齿条450移动的稳定性,避免晃动。
98.如图14和图15所示,拾取端420的外周设置底座421,拾取端420的旋转轴422,可转动的嵌设于底座421的开孔中;旋转轴422露出底座421的端部设置卡口423,卡口423内插设凸块(未图示)。对应于凸块,传感器424包括缺口425。其中,旋转轴422转动带动凸块朝向缺口425移动,传感器424感测到进入缺口425中的凸块,进而识别旋转轴422的旋转角度。
99.另外,齿条450还包括连接部452,连接部452和第一滑动部451排布于齿条450相对的两侧,连接部452与底座421固定连接,即,齿条450和拾取端420固定连接,一并移动。较佳的,连接部452和底座421可以是一体式结构。
100.在本实用新型的其他实施方式中,拾取端的底座和齿条的连接部构成一体式底座组件,底座组件上一体式排布齿条和拾取端,构成另一个装配体。整合不同的结构形成模块化的装配体,可增加拾取单元中各个元器件的组装便利性。
101.本实用新型还提供一种机械手臂装置,其包括上述的导轨系统100。
102.本实用新型提供的导轨系统和机械手臂装置,导轨单元采用直线型齿条结构,滑块单元采用齿轮结构,齿轮沿着齿条移动,以使得与滑块单元枢转连接的第一连杆和第二连杆的工作端的位置变化,实现导轨系统在多个方向上的位置调节。其中,齿条和齿轮的配合有助于实现导轨系统的制作成本降低。
103.本实用新型已由上述相关实施例加以描述,然而上述实施例仅为实施本实用新型
的范例。此外,上面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。必需指出的是,本实用新型还可有其他多种实施例,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。