1.本发明涉及汽车电子控制技术领域,尤其是涉及一种主动自适应眼球及脸部追踪定位自动电子后视镜系统。
背景技术:
2.随着科学技术的发展,汽车的普及率越来越高,为了观察车身后方的情况,常规的汽车左右两侧均安装有后视镜,从而便于驾驶员观察汽车的正后方。
3.目前,由于汽车的工况不同且汽车的外后视镜存在一定的视野盲区,驾驶员通常采用手动调节外后视镜的角度或者采用360全景系统,来观察特定区域的场景。
4.在实现本技术过程中,发明人发现该技术中至少存在如下问题:传统的采用手动调节外后视镜的角度,需要需要频繁手动调节后视镜的角度,因此不利于驾驶安全;若采用360全景系统,虽然可以看到车身,但由于使用了鱼眼镜头,在车尾距离摄像头较远处存在虚化模糊的现象,因此不利于驾驶安全。对此,有待进一步改进。
技术实现要素:
5.为了提高驾驶安全性,本技术提供一种主动自适应眼球及脸部追踪定位自动电子后视镜系统。
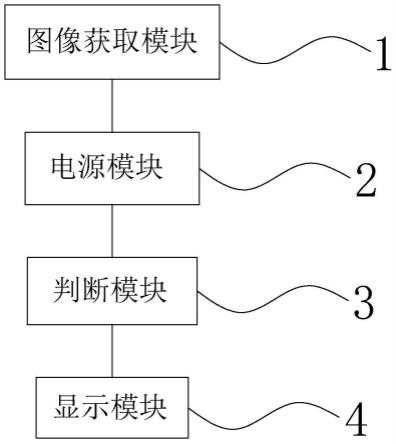
6.本技术提供的一种主动自适应眼球及脸部追踪定位自动电子后视镜系统采用如下的技术方案:一种主动自适应眼球及脸部追踪定位自动电子后视镜系统,包括图像获取模块:用于通过视野模组获取目标区域图像,所述视野模组包括用于获取车身前方区域图像的前摄像头、用于获取车身后方区域图像的后摄像头,以及用于获取驾驶员目光状态信息的监控摄像头,所述前摄像头和后摄像头均安装在车辆后视镜支架上,且前摄像头与车头之间的距离相较于后摄像头与车头之间的距离短,所述监控摄像头位于汽车的驾驶舱内;电源模块:与所述图像获取模块电连接,用于为图像获取模块供电;判断模块:与所述图像获取模块电连接,用于获取汽车工况状态信息,并结合驾驶员目光状态信息以选择目标区域图像;显示模块:与所述判断模块电连接,用于接收判断模块传输的目标区域图像,并在显示屏上显示目标区域图像。
7.通过采用上述技术方案,判断模块能够选择目标区域图像,使驾驶员不需频繁手动调节后视镜的角度,并且解决汽车盲区的问题,符合驾驶需求,从而提高驾驶安全性。
8.可选的,所述汽车工况状态信息包括车辆运行方向信息和车辆运行速度信息,所述车辆运行方向信息包括用于表示车辆向前运行的前进信息和用于表示车辆向后运行的后退信息,所述车辆运行速度信息包括用于表示车辆运行时速不超过30km/h的低速信息和用于表示车辆运行时速超过30km/h的高速信息;若判断模块判断车辆运行方向信息为前进信息、车辆运行速度信息为低速信息时,显示屏显示前摄像头获取的车身前方区域图像;若
判断模块判断车辆运行方向信息为前进信息、车辆运行速度信息为高速信息时,判断模块通过拼接车身前方区域图像和车身后方区域图像生成综合区域图像,显示屏显示综合区域图像;若判断模块判断车辆运行方向信息为后退信息、车辆运行速度信息为低速信息时,显示屏显示后摄像头获取的车身后方区域图像。
9.通过采用上述技术方案,显示屏能够在不同的场景显示所需的区域图像,便于驾驶员观察所需的区域图像,从而提高驾驶安全性。
10.可选的,所述车辆运行方向信息还包括转向信息,所述转向信息包括执行转向信息和不执行转向信息;若转向信息为执行转向信息时,显示模块对目标区域图像进行放大显示处理;若转向信息为不执行转向信息时,显示模块不对目标区域图像进行放大显示处理。
11.通过采用上述技术方案,在转向信息为执行转向信息时,对目标区域图像进行放大显示处理,便于驾驶员更加清楚的看到标区域图像,从而进一步提高驾驶安全性。
12.可选的,所述驾驶员目光状态信息包括用于表示驾驶员目光向左的视线左切换信息、用于表示驾驶员目光向右的视线右切换信息和用于表示驾驶员目光不变换的维持信息;若判断模块判断驾驶员目光状态信息为视线左切换信息且车辆运行方向信息为执行转向信息时,显示模块显示车身左前方区域图像;若判断模块判断驾驶员目光状态信息为视线右切换信息且车辆运行方向信息为执行转向信息时,显示模块显示车身右前方区域图像;若判断模块判断驾驶员目光状态信息为视线左切换信息且车辆运行方向信息为后退信息时,显示模块显示车身左后方区域图像;若判断模块判断驾驶员目光状态信息为视线右切换信息且车辆运行方向信息为后退信息时,显示模块显示车身右后方区域图像;若判断模块判断驾驶员目光状态信息为视线左切换信息且车辆运行速度信息为高速信息时,显示模块显示车身左方区域图像;若判断模块判断驾驶员目光状态信息为视线右切换信息且车辆运行速度信息为高速信息时,显示模块显示车身右方区域图像。
13.通过采用上述技术方案,判断模块能够通过驾驶员目光状态信息使显示模块显示对应的区域图像,从而实现智能切换驾驶员需要看到的场景,提高驾驶安全性。
14.可选的,所述视野模组还包括一个前摄像头和后摄像头共用的pcba控制板,所述前摄像头和后摄像头均包括光电ic和isp,所述光电ic和isp均与pcba控制板电连接。
15.通过采用上述技术方案,前摄像头和后摄像头共用的pcba控制板能够整体的尺寸体积,从而实现设备的小型化。
16.可选的,所述前摄像头和后摄像头所采用的光电ic的型号均为sc1330t。
17.通过采用上述技术方案,型号为sc1330t的光电ic能够支持复杂的片上操作,从而提高前摄像头和后摄像头的实用性。
18.可选的,所述前摄像头和后摄像头所采用的isp的型号均为fh8323。
19.通过采用上述技术方案,型号为fh8323的isp能够实现画面的高性能图像处理,从而进一步提高前摄像头和后摄像头的实用性。
20.综上所述,本技术包括以下至少一种有益技术效果:1.判断模块能够选择目标区域图像,使驾驶员不需频繁手动调节后视镜的角度,并且解决汽车盲区的问题,符合驾驶需求,从而提高驾驶安全性;2.型号为fh8323的isp能够实现画面的高性能图像处理,从而进一步提高前摄像
头和后摄像头的实用性。
附图说明
21.图1是本技术实施例用于体现后视镜支架的剖视图。
22.图2是本技术实施例中用于体现前摄像头的放大图。
23.图3是本技术实施例中电子后视镜系统的方框示意图。
24.图4是本技术实施例中用于体现视野模组的功能框图。
25.图5是本技术实施例中用于体现视频驱动器的示意图。
26.图6是本技术实施例中用于体现视频驱动器的示意图。
27.图7是本技术实施例中用于体现cn3-1318772-2芯片的示意图。
28.图8是本技术实施例中用于体现车身周边空间区域分割的示意图。
29.附图标记说明:1、图像获取模块;2、电源模块;3、判断模块;4、显示模块;5、后视镜支架;6、前摄像头;7、后摄像头。
具体实施方式
30.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图1-8以及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
31.本技术实施例公开一种主动自适应眼球及脸部追踪定位自动电子后视镜系统。
32.如图1、图2和图3所示,电子后视镜系统包括图像获取模块1,图像获取模块1能够通过视野模组获取目标区域图像,在本实施例中,视野模组包括两个前摄像头6和两个后摄像头7,两个前摄像头6分别安装在不同的车辆后视镜支架5上,前摄像头6能够获取车身前方区域图像;两个后摄像头7分别安装在不同的车辆后视镜支架5上,后摄像头7能够获取车身后方区域图像;同时,前摄像头6与车头之间的距离相较于后摄像头7与车头之间的距离短;视野模组还包括监控摄像头,监控摄像头主动追踪定位驾驶员头部、脸部及眼球方位以获取驾驶员目光状态信息,在本实施例中,监控摄像头安装在汽车驾驶舱的中控台上表面的中间位置处。
33.如图4所示,视野模组还包括pcba控制板,pcba控制板被位于同一个后视镜支架5上的前摄像头6和后摄像头7共用,其中,前摄像头6和后摄像头7均包括光电ic和isp,光电ic和isp均与pcba控制板电连接,在本实施例中,前摄像头6和后摄像头7所采用的isp的型号均为fh8323;前摄像头6和后摄像头7所采用的光电ic的型号均为sc1330t,其中,型号为sc1330t的光电ic的具体参数如表1所示,在其他实施例中,光电ic的型号还可以是sc200ai。
34.表1
在图4中的gpu能够处理图像信息,cpu能够处理逻辑信息,在gpu与cpu之间进行通信时,实现信息的交互。
35.前摄像头6获取目标区域图像的原理如图5所示,在图5中,采用到型号为sgm9154的视频驱动器u2;而后摄像头7获取目标区域图像的原理如图6所示,在图6中,采用到型号为sgm9154的视频驱动器u3。
36.如图3和图7所示,电子后视镜系统还包括电源模块2,电源模块2与图像获取模块1电连接,电源模块2能够为图像获取模块1供电,在本实施例中,电源模块2采用型号为cn3-1318772-2芯片;由图3可知,电源模块2能够将12v的电源转换为多种不同的电压,譬如3.3v、2.8v、1.8v,从而实现给光电ic、flash、图像处理芯片供电。
37.如图3所示,电子后视镜系统还包括判断模块3和显示模块4,显示模块4与判断模
块3电连接,显示模块4接收判断模块3传输的目标区域图像,并在显示屏上显示目标区域图像,而判断模块3与图像获取模块1电连接,判断模块3能够获取汽车工况状态信息,并通过汽车工况状态信息和驾驶员目光状态信息来选择目标区域图像,其中,汽车工况状态信息包括车辆运行方向信息和车辆运行速度信息,车辆运行方向信息包括前进信息和后退信息,前进信息表示车辆向前运行,后退信息表示车辆向后运行,而车辆运行速度信息包括低速信息和高速信息,低速信息表示车辆运行时速不超过30km/h,高速信息表示车辆运行时速超过30km/h;如图8所示,以车身左侧的空间作为示意,车身右侧的周边空间同理;把车身左侧的空间分割为10个部分,分别是第一区域、第二区域、第三区域、第四区域、第五区域、第六区域、第七区域、第八区域、第九区域以及第十区域;为了便于驾驶员在低速前进时观察前保险杠和前轮,譬如从停车位驶出的场景,当判断模块3判断车辆运行方向信息为前进信息、车辆运行速度信息为低速信息时,显示屏显示前摄像头6获取的车身前方区域图像,即第一区域、第二区域以及第三区域;为了便于驾驶员在高速行使状态时观察左右相邻车道,当判断模块3判断车辆运行方向信息为前进信息、车辆运行速度信息为高速信息时,判断模块3通过拼接车身前方区域图像和车身后方区域图像生成综合区域图像,显示屏显示综合区域图像,即第三区域、第五区域、第六区域、第七区域、第八区域、第九区域以及第十区域;为了便于驾驶员在低速倒车时观察后保险杠和后轮,譬如停车,当判断模块3判断车辆运行方向信息为后退信息、车辆运行速度信息为低速信息时,显示屏显示后摄像头7获取的车身后方区域图像,即第五区域、第六区域以及第七区域。
38.在本实施例中,can信号包括方向盘转角状态,车辆运行方向信息还包括转向信息,转向信息能够根据方向盘转角状态获得,其中,转向信息包括执行转向信息和不执行转向信息;当判断模块3判断转向信息为执行转向信息时,显示模块4对目标区域图像进行放大显示处理,从而更好的解决盲区的问题,提高驾驶安全性;若判断模块3判断转向信息为不执行转向信息时,显示模块4不对目标区域图像进行放大显示处理在本实施例中,驾驶员目光状态信息包括视线左切换信息、视线右切换信息和维持信息,视线左切换信息表示驾驶员目光向左,视线右切换信息表示驾驶员目光向右,维持信息表示驾驶员目光不变换;当判断模块3判断驾驶员目光状态信息为视线左切换信息且车辆运行方向信息为执行转向信息时,显示模块4显示车身左前方区域图像,即第一区域、第二区域以及第三区域;当判断模块3判断驾驶员目光状态信息为视线右切换信息且车辆运行方向信息为执行转向信息时,显示模块4显示车身右前方区域图像;若判断模块3判断驾驶员目光状态信息为视线左切换信息且车辆运行方向信息为后退信息时,显示模块4显示车身左后方区域图像,即第五区域、第六区域以及第七区域;当判断模块3判断驾驶员目光状态信息为视线右切换信息且车辆运行方向信息为后退信息时,显示模块4显示车身右后方区域图像;若判断模块3判断驾驶员目光状态信息为视线左切换信息且车辆运行速度信息为高速信息时,显示模块4显示车身左方区域图像,即第三区域、第五区域、第六区域、第七区域、第八区域、第九区域以及第十区域;若判断模块3判断驾驶员目光状态信息为视线右切换信息且车辆运行速度信息为高速信息时,显示模块4显示车身右方区域图像,从而实现智能切换驾驶员需要看到的场景。
39.本技术实施例一种主动自适应眼球及脸部追踪定位自动电子后视镜系统的实施原理为:电子后视镜系统包括图像获取模块1,图像获取模块能够通过视野模组获取目标区
域图像;电子后视镜系统还包括判断模块3和显示模块4,显示模块4与判断模块3电连接,显示模块4接收判断模块3传输的目标区域图像,并在显示屏上显示目标区域图像,而判断模块3与图像获取模块1电连接,判断模块3能够获取汽车工况状态信息,并通过汽车工况状态信息和驾驶员目光状态信息来选择目标区域图像。
40.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。