1.本发明涉及一种基于柱坐标进行搅拌摩擦焊的方法及装置,属于搅拌摩擦焊接技术领域。
背景技术:
2.搅拌摩擦焊接技术,是利用高速旋转的焊具(搅拌头)与工件摩擦产生热量,使被焊接材料局部温度升高而软化,实现大变形量剪切变形;在焊具的搅拌作用下被焊接工件界面被卷入金属内部,而新生成的界面在焊具的压力下及范德瓦尔力作用下焊合形成焊接组织。
3.搅拌摩擦焊接焊接接头质量高,力学性能好。搅拌摩擦焊接的工艺参数包括搅拌头的转动速度,焊接的行进速度,焊接时搅拌头的轴向下压力,以及搅拌头旋转轴与焊接面法向的夹角(倾角)。
4.搅拌头2一般采用轴肩端面及搅拌针端面朝焊接前进方向a,即搅拌头2的自旋转轴线与待焊接的板材(工件3)的法向具有一个夹角α,该夹角α为2~4度时焊接效果最好,如图1所示。如果没有倾角,搅拌摩擦焊接时发热量会降低,焊接质量和焊接效果会变差。
5.由于焊接倾角的存在,同时被焊接件是固定在夹具上的,因此在焊接焊缝为闭合曲线的焊件时,当前进方向在焊接平面上发生改变时,必须采用5轴联动动力系统调整搅拌头与焊接平面的取向才能完成焊接。5轴联动动力系统成本较高。
技术实现要素:
6.为了克服现有技术中存在的问题,本发明提供一种基于柱坐标进行搅拌摩擦焊的方法及装置,采用三轴联动系统即可完成闭合曲线焊接轨迹的搅拌摩擦焊接,降低了成本的同时也有利于简化焊接程序的编写。具体技术方案如下。
7.一种基于柱坐标采用三轴联动进行搅拌摩擦焊的方法,其特征在于,包括以下步骤:
8.建立柱坐标系,搅拌头和载物平台的关系由r,θ,z三个参数决定,其中r,θ是垂直于z轴的平面内的极坐标,载物平台所在的平面平行于极坐标平面;
9.采用柱坐标系r,θ,z进行数控编程以控制搅拌头相对于载物平台的运动轨迹。
10.进一步地,当焊接轨迹是一个闭合曲线时,极坐标系的原点位于封闭曲线的内部。这样可以保证θ旋转360
°
即可完成闭合曲线轨迹的焊接。
11.优选地,所述搅拌头的轴向与所述载物平台所在的平面的夹角保持固定且不为90
°
。
12.基于同一发明构思,本发明还提供一种搅拌摩擦焊接装置,其包括载物平台和搅拌头,其特征在于,还包括有三轴联动系统,所述三轴联动系统能够实现所述搅拌头相对于所述载物平台具有三种相对运动,分别是:沿着z轴方向的运动,沿着r轴方向的运动,以及所述载物平台在其所在平面内的旋转运动,旋转角度为θ;所述z轴垂直于所述载物平台所
在的平面,所述r轴垂直于所述z轴。
13.优选地,所述搅拌头能够沿着z轴方向的运动,所述载物平台能够进行所述旋转运动以及沿着r轴方向的运动。
14.优选地,所述搅拌头能够沿着z轴方向以及r轴方向的运动,所述载物平台能够进行所述旋转运动。
15.优选地,所述搅拌头能够进行z轴方向以及r轴方向的运动,并且所述搅拌头能够绕着所述z轴旋转。本领域技术人员知晓搅拌头本身也会发生自旋转运动,因此搅拌头能够绕着z轴旋转是指搅拌头的自旋转驱动系统及固定系统连同搅拌头一起绕着z轴旋转。
16.优选地,所述搅拌头能够进行r轴方向的运动,并且所述搅拌头能够绕着所述z轴旋转,所述载物平台能够沿着z轴方向运动。
17.优选地,所述搅拌头的轴向与所述载物平台所在的平面的夹角保持固定且不为90
°
。保持搅拌头的轴向和载物平台所在的平面的夹角固定,非常适合焊接轨迹没有起伏完全位于同一平面内的情况,比如平面内的圆形焊接轨迹,这种情况下,焊接效率极高,且稳定性好。
18.进一步地,所述搅拌摩擦焊接装置的搅拌头还能够绕着r’轴旋转,所述r’轴平行于或者垂直于所述r轴。这里的搅拌头绕着r’轴旋转是指搅拌头的自旋转驱动系统及固定系统连同搅拌头一起绕着r’轴旋转(一定范围内摆动)。当焊接曲线在z轴方向发生抬升或者降低时(焊接曲线相对于r-θ平面具有起伏),搅拌头可通过绕r’轴转动以保持焊接倾角,搅拌头沿着z轴的升降实现搅拌头与焊接曲线的贴合。此种情况下,该搅拌摩擦焊接装置成为四轴联动系统。
19.柱坐标系是指高向上位置采用直线坐标系(z轴)来进行表述,而与高向(z轴)垂直的平面上的位置由极坐标进行描述。这种坐标可以由r,θ,z三个参数表达空间所有位置点。同时,a(r,θ,z)=a’(r,θ 2nπ,z),n为整数。
20.其中升降的z轴的功能主要是搅拌头插入焊缝进行起焊,以及焊接完成的抽针过程。旋转角度θ和r轴方向的运动,达到了通过极坐标构成搅拌摩擦焊接曲线的目的。
21.本发明的优势在于:在不改变搅拌头自身取向的情况下,沿封闭曲线前进的搅拌头的端面总是朝向焊接曲线轨迹的,以实现起点与终点的重合。
附图说明
22.图1是搅拌摩擦焊接原理示意图
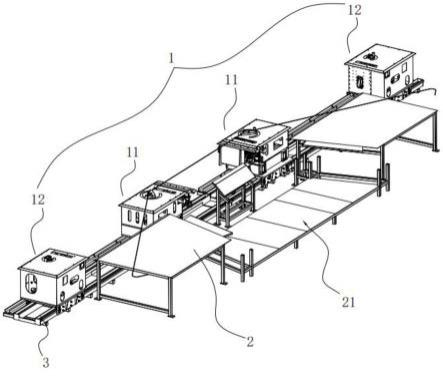
23.图2是本发明的搅拌摩擦焊接装置的示意图(一种视角下);
24.图3是本发明的搅拌摩擦焊接装置的示意图(另一种视角下);
25.图4是示例1中现有技术焊接方法的示意图;
26.图5是示例1中本发明焊接方法的示意图;
27.图6是示例2中现有技术焊接方法的示意图;
28.图7是示例2中本发明焊接方法的示意图;
29.图8是为搅拌头增加r’旋转轴的示意图。
30.图中:1-载物平台、2-搅拌头、3-工件。
具体实施方式
31.下面结合附图对本发明作进一步详细描述。
32.如图2-3所示,搅拌摩擦焊接装置,其包括载物平台1、搅拌头2以及三轴联动系统,三轴联动系统能够实现搅拌头2相对于载物平台1具有三种相对运动,分别是:沿着z轴方向的运动,沿着r轴方向的运动,以及载物平台在其所在平面内的旋转运动;z轴垂直于载物平台所在的平面,r轴垂直于z轴。
33.具体的,搅拌头2能够沿着z轴方向的进行升降运动,载物平台能够进行旋转运动以及沿着r轴方向的前后运动。
34.当然本领域技术人员可以理解的是,三轴联动系统的实现方式有多种,还包括以下方式:搅拌头2能够沿着z轴方向以及r轴方向的运动,载物平台1能够进行旋转运动;或者搅拌头能够进行z轴方向以及r轴方向的运动,并且搅拌头能够绕着所述z轴旋转;或者搅拌头能够进行r轴方向的运动,并且搅拌头能够绕着z轴旋转,载物平台能够沿着z轴方向运动。
35.对于焊接轨迹位于同一平面内的情况,优选搅拌头的轴向与载物平台所在的平面的夹角保持固定且不为90
°
,这种情况下,能够提升焊接效率,且稳定性好。
36.如图8所示,为了更好地适应具有起伏的焊接轨迹,搅拌摩擦焊接装置的搅拌头还能够绕着r’轴旋转,即为搅拌头增加一个旋转轴,r’轴平行于或者垂直于所述r轴。这里的搅拌头绕着r’轴旋转是指搅拌头的自旋转驱动系统及固定系统连同搅拌头一起绕着r’轴旋转。当焊接曲线在z轴方向发生抬升或者降低时(焊接曲线相对于r-θ平面具有起伏),搅拌头可通过绕r’轴转动以保持焊接倾角,搅拌头沿着z轴的升降实现搅拌头与焊接曲线的贴合。此种情况下,该搅拌摩擦焊接装置成为四轴联动系统。
37.基于柱坐标采用三轴联动进行搅拌摩擦焊的方法,主要包括以下步骤:
38.建立柱坐标系,搅拌头和载物平台的关系由r,θ,z三个参数决定,其中r,θ是垂直于z轴的平面内的极坐标,载物平台所在的平面平行于极坐标平面;搅拌头的轴向与载物平台所在的平面的夹角保持固定且不为90
°
;采用柱坐标系r,θ,z进行数控编程以控制搅拌头相对于载物平台的运动轨迹;当焊接轨迹是一个闭合曲线时,极坐标系的原点位于封闭曲线的内部,这样可以保证θ旋转360
°
即可完成闭合曲线轨迹的焊接。
39.下面将通过两个示例来说明本发明的搅拌摩擦焊方法的优势。
40.示例1:对圆形焊接轨迹的焊接。
41.如图4所示,采用笛卡尔坐标系对于圆形焊接缝进行编程,其路径由普通三轴笛卡尔坐标可以描述为,x2 y2=r2。由于载物平台(工件)本身没有旋转运动,搅拌头在x-y平面内移动时,需要不断地调整搅拌头的取向(方位),如图4所示,搅拌头在圆形轨迹的三个不同位置就有三种不同的取向,而要实现搅拌头方位的不断变化,搅拌头需要具有两个自由度,也就是要实现这种圆形轨迹的焊接,需要用到五轴联动系统。
42.如图5所示,如果采用本发明的柱坐标系r,θ,z进行数控编程,其圆形轨迹方程可描述为r(r,θ)=r,焊接过程中,图5中的搅拌摩擦焊接装置的搅拌头取向保持不变,只需要载物平台(工件)进行旋转即可(如图4所示),从而实现平面内圆形闭合曲线的带倾角焊接。
43.示例2:对方形焊接轨迹的焊接。
44.如图6所示,采用笛卡尔坐标系对于方形焊接缝进行编程,与示例1相同,由于载物
平台(工件)本身没有旋转运动,搅拌头在x-y平面内移动时,方形轨迹的不同边需要调整搅拌头的取向(方位),如图6所示,搅拌头在方形轨迹的三个边就有三种不同的取向,而要实现搅拌头方位的不断变化,搅拌头需要具有两个自由度,也就是要实现这种方形轨迹的焊接,需要用到五轴联动系统。
45.如图7所示,如果采用本发明的柱坐标系r,θ,z进行数控编程,其方程可描述为
46.r=∣a/cosθ∣(θ∈(0,π/4)),
47.r=∣a/sinθ∣(θ∈(π/4-3π/4)),
48.r=∣a/cosθ∣(θ∈(3π/4-5π/4)),
49.r=∣a/sinθ∣(θ∈(5π/4-7π/4)),
50.r=∣a/cosθ∣(θ∈(7π/4-2π))。
51.如图7所示,焊接过程中,图2中的搅拌摩擦焊接装置的搅拌头取向保持不变,只需要载物平台(工件)进行旋转以及沿着r轴移动即可,从而实现平面内方形闭合曲线的带倾角焊接。
52.虽然上面两个示例限于圆形和方形闭合轨迹,但是本发明的焊接装置及方法也适用于其他类型的闭合轨迹的焊接,当然可以适用于非闭合轨迹的焊接。
53.上面结合附图对本发明的实施例进行了描述,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是局限性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。