1.本发明属于仿生机器人技术领域,具体涉及一种螃蟹机器人的行走机构。
背景技术:
2.现有仿螃蟹步行机构,如申请号为201510044620x,发明名称为一种仿螃蟹步行机构的发明专利,该方案采用单曲轴驱动连杆机构实现螃蟹的横向行走,但该机构中六个仿生腿都连接在同一个曲轴上,其中位于两端的四个仿生腿与位于中间的两个仿生腿之间的相位角差为180
°
,这使得机构行进速度较慢,运动稳定性差,与螃蟹实际运动规律不相符;另外,该机构的动力只有一个电机通过齿轮传动驱动曲轴转动,使得机构动力有限,整体平衡性差,抗干扰能力弱。
技术实现要素:
3.本发明的目的是克服现有技术存在的机构动力有限、抗干扰能力弱、行进速度慢、运动稳定性差等问题,而提供一种螃蟹机器人的行走机构。
4.为了解决上述技术问题,本发明采用如下方案实现:
5.一种螃蟹机器人的行走机构,包括机架,机架的中心安装有主动驱动组件,主动驱动组件两侧的机架上各安装有一个从动驱动组件,机架的两端即从动驱动组件远离主动驱动组件的一侧,各设置有一个大腿安装轴和支撑杆安装轴,支撑杆安装轴位于大腿安装轴的正下方;螃蟹机器人行走机构共有六个仿生腿,每侧有三个,两侧的三个仿生腿相对机架的中心轴对称设置,单侧的三个仿生腿固定连接在从动驱动组件上,主动驱动组件带动两个从动驱动组件相对机架向机器人的同一侧转动,三个仿生腿随从动驱动组件转动的相位差为120
°
。
6.具体地,本发明从动驱动组件包括两个大齿轮和由四个曲柄构成的曲轴,单个曲柄具有三个连接端,三个连接端之间的相位差为120
°
,相邻两个曲柄的相同连接端之间通过连杆固定连接,四个曲柄之间的三个连杆之间的相位差为120
°
,位于曲轴两端的两个曲柄分别与一个大齿轮固定连接。实现机器人换步行走,实现越障功能。
7.具体地,因为螃蟹步行足与连杆机构有运动的相似性,基于螃蟹步行足的运动轨迹分析,仿生腿采用一组单自由度连杆机构。本发明每个仿生腿均包括传动杆、支撑杆、小腿和大腿,大腿的一端与小腿一端转动连接,大腿的另一端转动连接在机架的大腿安装轴上,传动杆的一端转动连接在靠近小腿长度方向的中心位置处,传动杆的另一端固定连接在曲轴上,支撑杆的一端转动连接在靠近传动杆长度方向的中心位置处,支撑杆的另一端转动连接在机架的支撑杆安装轴上。
8.可通过优化计算,得到仿生腿每个关节的合适的杆长,最终得到比较平稳的速度以及比较可靠的运动弧度。
9.具体地,本发明主动驱动组件包括电机、涡轮、蜗杆及涡轮蜗杆安装架,涡轮蜗杆安装架固定连接在机架的主动驱动组件安装位上,电机固定安装于机架顶端,电机的输出
轴竖直向下设置;蜗杆竖向转动连接在涡轮蜗杆安装架,蜗杆的上端固连在电机的输出轴上,蜗杆的下端转动连接在涡轮蜗杆安装架底端,涡轮与蜗杆啮合传动,且安装涡轮的转轴上同轴连接有两个小齿轮,两个小齿轮分别位于涡轮的两侧,且每个小齿轮位于同一端的两个从动驱动组件的大齿轮之间,并与两个大齿轮啮合。
10.蜗轮蜗杆可以提供较大的传动比,以满足步行机构大扭矩的需求,电机通过蜗轮蜗杆将动力传递给齿轮轴,齿轮轴通过小齿轮将动力输出给大齿轮,大齿轮驱动曲轴带动各仿生腿运动,电机正转时可带动机器人向一侧横向行走,改变电机转向时,机器人向另一侧横向行走,模仿了螃蟹的横向行走特征。
11.优选地,为了提供足够可靠的动力,主动驱动组件包括两个电机和两个蜗杆,两个蜗杆竖向转动连接在涡轮蜗杆安装架上,两个蜗杆的顶端分别与一个电机的输出轴固定连接,涡轮啮合连接于两个蜗杆之间,两个电机均固定安装于机架顶端,这样的传动方式可以减少单根蜗杆承受的载荷。
12.具体地,两个电机同步带动两个蜗杆同步转动,共同带动涡轮转动,涡轮带动两个小齿轮同步转动,并分别驱动两个从动驱动组件的大齿轮转动,从而带动螃蟹机器人的两个从动驱动组件向同一个方向转动,两侧的驱动传动杆使小腿在大腿的配合下向该方向移动,使两侧共三组仿生腿按120
°
相位差依次移动,同一时刻只有两支腿触地提供支撑。
13.与现有技术相比,本发明具有如下有益效果:
14.本发明设计了两个从动驱动组件,包括两个曲轴,每个曲轴上各安装三条仿生腿,三条仿生腿的转动相位差为120
°
,由主动驱动组件驱动两个曲轴向相同方向转动,使两侧共三组仿生腿按120
°
相位差依次移动,同一时间螃蟹机器人行走机构至少有一组仿生腿支撑于地面,三组仿生腿交替运动,使单一仿生腿在同一周期内更多次触地,提供更多进给量,从而提高机器人行进速度,并且单侧三条仿生腿的运动衔接更加紧密,减少了机器人竖直方向上的颠簸,提高其运行的稳定性,符合螃蟹实际运动规律;本发明主动驱动组件包括两个电机,两个电机通过涡轮蜗杆机构共同驱动两个从动驱动组件同步转动,使机构动力很足,行进速度快,整体平衡性好,抗干扰能力强。
附图说明
15.图1为从动组件的结构示意图;
16.图2为曲轴的结构示意图;、
17.图3为单条仿生腿在曲轴上的安装结构示意图;
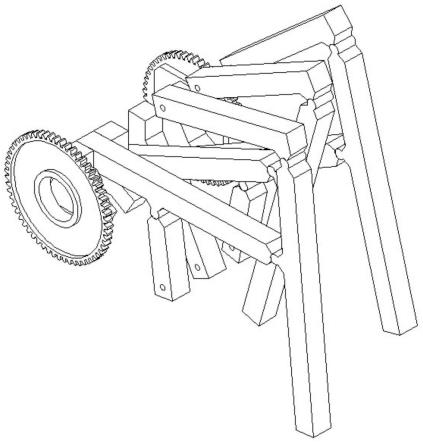
18.图4为螃蟹机器人单侧三条仿生腿在曲轴上的安装结构示意图;
19.图5为一半机架的结构示意图;
20.图6为完整机架的结构示意图;
21.图7为蜗轮蜗杆安装架的结构示意图;
22.图8为蜗轮蜗杆的安装结构示意图;
23.图9为蜗轮蜗杆安装架连接于机架上的结构示意图;
24.图10为传动结构示意图;
25.图11为螃蟹机器人的行走机构示意图;
26.图12为单个仿生腿的结构简图;
27.图13为单个仿生腿足端轨迹曲线;
28.图14为单个仿生腿末端沿x轴运动轨迹;
29.图15为单个仿生腿末端沿y轴运动轨迹;
30.图中:1-机架,2-小齿轮,3-大齿轮,4-曲柄,5-支撑杆,6-传动杆,7-小腿,8-大腿,9-涡轮蜗杆安装架,10-蜗轮,11-蜗杆,12-电机,13-曲轴,14-主动驱动组件安装位,15-从动驱动组件安装位,16-大腿安装轴,17-支撑杆安装轴。
具体实施方式
31.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.如图1、2所示,一个螃蟹机器人有两个从动驱动组件,单个从动驱动组件包括两个大齿轮3和由四个曲柄4构成的曲轴13,单个曲柄4具有三个连接端,三个连接端之间的相位差为120
°
,相邻两个曲柄的相同连接端之间通过连杆固定连接,四个曲柄之间的三个连杆之间的相位差为120
°
,位于曲轴两端的两个曲柄分别与一个大齿轮固定连接。
33.如图3所示,螃蟹机器人行走机构有六个仿生腿,单侧有三个,每个仿生腿均包括传动杆6、支撑杆5、小腿7和大腿8,大腿的一端与小腿一端转动连接,大腿的另一端转动连接在机架的大腿安装轴16上,传动杆的一端转动连接在靠近小腿长度方向的中心位置处,传动杆的另一端固定连接在曲轴上,支撑杆的一端转动连接在靠近传动杆长度方向的中心位置处,支撑杆的另一端转动连接在机架的支撑杆安装轴17上。
34.如图4所示,螃蟹机器人单侧的三条仿生腿的支撑杆另一端均固定连接在曲轴上,且三个传动杆的相位差为120
°
,即螃蟹机器人单侧的三条仿生腿的相位差为120
°
,螃蟹机器人两侧的仿生腿对称设置,传动杆6、支撑杆5、小腿7和大腿均为杆、轴类结构。
35.经过多次优化计算,得到本实施例所述一组合适的杆长,如图12所示,ab为曲柄,cd为支撑杆,gf为大腿,eh为小腿,be为传动杆,各部分的长度优化为ab=22mm,bd=60mm,be=150mm,cd=52.5mm,gf=120mm,ef=70mm,eh=140mm,在adams中对腿部结构进行仿真分析,其足端轨迹曲线如图13所示,沿顺时针方向,从a点开始步行机构末端离地向基体收缩;bc段开始往前迈步;cd段腿渐渐开始回落;d端开始接触地面,da段为腿部触地为整体提供行进的动力,最终得到比较平稳的速度以及比较可靠的运动弧度。
36.以图12所示的e为基准点,通过上述仿真求得h点相对于e点的位移变化曲线,如图14、15所示,可知一个完整周期内步行腿沿x轴的跨度为108mm,沿y轴的跨度为60mm,机构组成相对简单,具有很好的承载能力。
37.如图5、6所示,机架为对称结构,由两部分完全相同的结构组装形成,机架的中心形成主动驱动组件安装位14,电机安装位的两侧各为一个从动驱动组件安装位15,机架的左右两端各设置一个大腿安装轴16和支撑杆安装轴17,支撑杆安装轴位于大腿安装轴的正下方;曲轴两端的大齿轮分别与曲轴安装位处的机架转动连接。
38.如图7-11所示,主动驱动组件包括电机12驱动的涡轮10、蜗杆11及涡轮蜗杆安装架9,两个蜗杆竖向转动连接在涡轮蜗杆安装架上,两个蜗杆的顶端分别与一个电机的输出
轴固定连接,两个蜗杆之间啮合连接有一个涡轮,与涡轮同轴连接有两个小齿轮2,两个小齿轮分别位于涡轮的两侧,且每个小齿轮位于同一端的两个从动驱动组件的大齿轮之间,并与两个大齿轮啮合,两个电机同步带动两个蜗杆同步转动,共同带动涡轮转动,涡轮带动两个小齿轮同步转动,并分别驱动两个从动驱动组件的大齿轮转动,从而带动螃蟹机器人的两个从动驱动组件向同一个方向转动,因曲轴结构的设计,螃蟹机器人两侧的传动杆6使小腿7在大腿8的配合下向该方向移动,使得小腿7下端触地点进行有规律的曲线运动,每侧三条仿生腿,两侧共三组按120
°
相位差依次移动,保证同一时间螃蟹机器人行走机构至少有一组仿生腿支撑于地面,使机器人连续向身体的一侧横向移动。
39.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。