1.本发明属于机器人技术领域,具体涉及一种可分体多模态轮腿四足机器人。
背景技术:
2.经过半个多世纪的快速发展,足式机器人的研究取得了长足的进展并涌现出了大量的研究成果,包括了单足(monopod)、双足(biped)、四足(quadruped)和六足(hexapod)等足式机器人。最先进的四足机器人以美国boston dynamics公司的bigdog、ls3和wildcat为代表。其中bigdog和ls3可以在碎石、丛林、雪山和山丘等自然地形上实现对角小跑,能够自主跟随操作者并具备较强的负重能力和平衡能力,目前这些机器人正朝着战场实用化的目标以较快的速度进行控制算法完善和功能扩展,如加装强力机械臂、语音和反恐手势指令识别和翻倒自我恢复以及搭载机枪精准射击等。但是大多数四足机器人只能进行目标任务地点逐个勘探,并且一旦躯体受到外部剧烈冲击便会整体瘫痪,如此使得四足机器人的应用环境有所局限。
技术实现要素:
3.本发明针对上述问题提供了一种可分体多模态轮腿四足机器人。
4.为达到上述目的本发明采用了以下技术方案:
5.可分体多模态轮腿四足机器人,由一号分离体和二号分离体组成,所述一号分离体和二号分离体均可实现单独作业。
6.进一步,所述一号分离体和二号分离体均包括躯体框架模块、支腿模块、平行四杆模块、控制板、电池和轮毂平移模块,所述一号分离体还包括前轮转向模块和图像采集模块,所述二号分离体还包括后轮驱动模块,所述躯体框架模块用于安装支腿模块、平行四杆模块、控制板、电池和图像采集模块,每个所述躯体框架模块安装有两个支腿模块,所述图像采集模块搭载可旋转云台,可进行360度全景图像信息获取,所述平行四杆模块和轮毂平移模块用于带动前轮转向模块或后轮驱动模块进行升降和左右移动,所述一号分离体和二号分离体通过左右两侧的锁紧与释放模块实现分离与组合。
7.再进一步,所述躯体框架模块包括挡板支架和四个连接管,四个所述连接管分别固定连接在挡板支架的四个角上,所述锁紧与释放模块包括锁紧轴、t型特殊套筒、复位弹簧、止推杆、楔形块、一号电动推杆、一号固定架和接近传感器,所述锁紧轴和t型特殊套筒分别固定连接在一号分离体和二号分离体上连接管的端部,在所述锁紧轴的圆周面上开设有环形槽,所述锁紧轴的前端呈锥形,所述锁紧轴可套插进t型特殊套筒中,所述t型特殊套筒的内腔与锁紧轴的形状相对应,所述止推杆活动设置在t型特殊套筒上的竖直管中,且所述止推杆的下端可卡在环形槽内,所述复位弹簧套设在止推杆上,用于对止推杆施加远离t型特殊套筒的力,在上下两个止推杆之间设置有楔形块,在所述楔形块的厚端固定连接在一号电动推杆上,所述一号电动推杆的另一端安装在一号固定架上,所述一号固定架安装在上下两个连接管之间,且一号固定架与t型特殊套筒位于相同的连接管上,所述接近传感
器有两个,分别安装于左右两侧的连接管上,所述接近传感器与锁紧轴安装在相同的分离体上,所述一号电动推杆、接近传感器和图像采集模块均由控制板控制。
8.更进一步,所述支腿模块包括一号伺服电机、二号伺服电机、三号伺服电机、电机固定架、小腿旋转轴、小腿连接杆、大腿连接杆、大腿杆件和橡胶足端,所述一号伺服电机固定安装在挡板支架上,所述电机固定架安装在一号伺服电机的输出轴上,所述二号伺服电机和三号伺服电机分别安装在电机固定架的左右两侧,且所述二号伺服电机和三号伺服电机同轴设置,所述小腿旋转轴固定安装在二号伺服电机的输出轴上,所述小腿连接杆的一端铰接在小腿旋转轴的一侧,所述小腿连接杆的另一端与大腿杆件的一端铰接,所述大腿连接杆的一端与三号伺服电机的输出轴铰接,所述大腿连接杆的另一端与大腿杆件铰接,所述小腿连接杆两端的铰接点与大腿连接杆两端的铰接点共同构成平行四边形,所述橡胶足端安装在大腿杆件的下端。
9.更进一步,所述平行四杆模块包括升降电机,所述升降电机安装在挡板支架的中部,在所述升降电机的输出轴上通过梯度齿轮轴安装有一号锥齿轮,在所述一号锥齿轮的左右两侧分别啮合连接有二号锥齿轮和三号锥齿轮,所述二号锥齿轮和三号锥齿轮安装在同一锥齿轮轴上,所述锥齿轮轴的两端分别安装在两个l型固定架上,所述l型固定架安装在挡板支架上,所述二号锥齿轮的轮毂侧固定连接有一号升降杆,在所述一号升降杆的另一端铰接有二号升降杆,所述二号升降杆的另一端与四号升降杆的一端铰接,所述四号升降杆的中部与三号升降杆的一端铰接,在所述二号升降杆与四号升降杆之间的铰接轴以及四号升降杆与三号升降杆之间的铰接轴上均设置有隔离套筒,所述三号升降杆的另一端通过锁紧套筒与三号锥齿轮的轮毂侧滑动连接,所述四号升降杆用于带动前轮转向模块或后轮驱动模块升降和左右平移,在所述锥齿轮轴以及四号升降杆与三号升降杆之间的隔离套筒上均设置有可分离卡环,在两个可分离卡环之间连接有辅助弹簧。
10.更进一步,所述轮毂平移模块包括三号固定架和伸缩杆,所述三号固定架固定安装在躯体框架模块上,在所述三号固定架上固定安装有二号电动推杆,所述二号电动推杆的另一端固定连接有推杆轴,在所述推杆轴的另一端固定连接有分离拨杆,所述分离拨杆的另一端卡装在锁紧套筒上的凹槽内,所述锁紧套筒滑动设置在锥齿轮轴上,所述三号升降杆固定连接在锁紧套筒上,当所述锁紧套筒与三号锥齿轮轮毂侧的限位槽配合时,其可与三号锥齿轮一同转动,当锁紧套筒滑动至另一侧时,锁紧套筒与三号锥齿轮分离,锁紧套筒与l型固定架上的锁紧槽配合,可实现锁紧套筒的锁紧;所述伸缩杆滑动设置在连接管上,所述伸缩杆的下端与前轮转向模块或后轮驱动模块固定连接。
11.更进一步,所述前轮转向模块包括两个一号安装架,在所述一号安装架上安装有滚轮,在所述一号安装架的上端转动连接有一号连接杆,两个一号连接杆分别与一号连接座的两端固定连接,在所述一号连接座的中部固定连接有转向电机,在所述一号安装架的内侧固定连接有t型套筒,在所述t型套筒的竖直杆上转动连接有转向短杆,两个所述转向短杆分别与转向长杆的两端转动连接,所述转向长杆的中部与所述转向电机的输出轴固定连接,所述一号连接杆与对应的伸缩杆固定连接,所述一号连接座与对应的四号升降杆转动连接。
12.更进一步,所述后轮驱动模块包括两个二号安装架,在所述二号安装架内安装有无刷轮毂电机,在所述二号安装架的上端固定连接有二号连接杆,两个二号连接杆分别与
二号连接座的两端固定连接,所述二号连接杆与对应的伸缩杆固定连接,所述二号连接座与对应的四号升降杆转动连接。
13.更进一步,所述躯体框架模块还包括外壳,所述外壳包裹在四个连接管上。
14.更进一步,所述一号分离体和二号分离体还包括电磁铁模块,所述电磁铁模块包括电磁铁固定架和电磁铁,所述电磁铁安装在电磁铁固定架上,所述电磁铁固定架安装在左右两侧的连接管之间,并与连接管固定连接,所述控制板安装在电磁铁固定架上,所述控制板包括4g模块和gps模块,所述4g模块用于进行远程数据传输,所述gps模块用于实现精准定位。
15.与现有技术相比本发明具有以下优点:
16.1、本发明可进行分离,从而同时进行多个地点的勘探,极大提高了工作效率,并且在受到外部打击后,完整一侧的躯体在分离的同时,向远程发送受损状况和位置信息给操作员,之后继续执行系统设定任务,如果仅是多点勘探而进行躯体分离,完成任务后可通过控制器处理图像采集模块信息并结合接近传感器的反馈,精确定位组合部位从而完成双躯体的组合锁紧,之后能执行更加艰巨的任务,如此使机器人的功效发挥最大;
17.2、本发明仅采用了一号电动推杆来驱动锁紧与释放模块,成本低廉,所占空间小,在外壳的保护下可靠性高。
附图说明
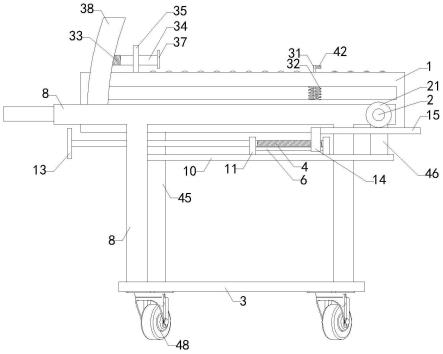
18.图1为本发明的结构示意图;
19.图2为本发明的结构示意图;
20.图3为本发明无支腿模块的结构示意图;
21.图4为本发明无壳体的结构示意图;
22.图5为本发明图4中圈a的局部放大图;
23.图6为本发明t型特殊套筒与锁紧轴的连接示意图;
24.图7为本发明支腿模块的结构示意图;
25.图8为本发明电机固定架的结构示意图;
26.图9为本发明平行四杆模块的结构示意图;
27.图10为本发明轮毂平移模块的结构示意图;
28.图11为本发明平行四杆模块的俯视图;
29.图12为本发明图11中圈b的局部放大图;
30.图13为本发明图12的剖视图;
31.图14为本发明锁紧套筒的结构示意图;
32.图15为本发明平行四杆模块的的侧视图;
33.图16为本发明图15中圈c的剖视图;
34.图17为本发明前轮转向模块的结构示意图;
35.图18为本发明后轮驱动模块的结构示意图;
36.图19为本发明电磁铁模块与控制板的安装示意图;
37.图20为本发明图像采集模块的结构示意图。
具体实施方式
38.为了进一步阐述本发明的技术方案,下面通过实施例对本发明进行进一步说明。
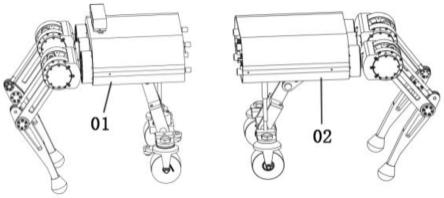
39.如图1至图19所示,可分体多模态轮腿四足机器人,由一号分离体01和二号分离体02组成,所述一号分离体01和二号分离体02均可实现单独作业。
40.所述一号分离体01和二号分离体02均包括躯体框架模块1、支腿模块2、平行四杆模块3、控制板4、电池5和轮毂平移模块10,所述一号分离体01还包括前轮转向模块6和图像采集模块7,所述二号分离体02还包括后轮驱动模块8,所述躯体框架模块1用于安装支腿模块2、平行四杆模块3、控制板4、电池5和图像采集模块7,每个所述躯体框架模块1安装有两个支腿模块2,所述图像采集模块7搭载可旋转云台,可进行360度全景图像信息获取,所述平行四杆模块3和轮毂平移模块10用于带动前轮转向模块6或后轮驱动模块8进行升降和左右移动,所述一号分离体01和二号分离体02通过左右两侧的锁紧与释放模块9实现分离与组合。
41.所述躯体框架模块1包括挡板支架101、四个连接管102和外壳103,四个所述连接管102分别固定连接在挡板支架101的四个角上,所述外壳103包裹在四个连接管102上,所述锁紧与释放模块9包括锁紧轴901、t型特殊套筒902、复位弹簧903、止推杆904、楔形块905、一号电动推杆906、一号固定架907和接近传感器908,所述锁紧轴901和t型特殊套筒902分别固定连接在一号分离体01和二号分离体02上连接管102的端部,在所述锁紧轴901的圆周面上开设有环形槽909,所述锁紧轴901的前端呈锥形,所述锁紧轴901可套插进t型特殊套筒902中,所述t型特殊套筒902的内腔与锁紧轴901的形状相对应,所述止推杆904活动设置在t型特殊套筒902上的竖直管中,且所述止推杆904的下端可卡在环形槽909内,所述复位弹簧903套设在止推杆904上,用于对止推杆904施加远离t型特殊套筒902的力,在上下两个止推杆904之间设置有楔形块905,在所述楔形块905的厚端固定连接在一号电动推杆906上,所述一号电动推杆906的另一端安装在一号固定架907上,所述一号固定架907安装在上下两个连接管102之间,且一号固定架907与t型特殊套筒902位于相同的连接管102上,所述接近传感器908有两个,分别安装于左右两侧的连接管102上,所述接近传感器908与锁紧轴901安装在相同的分离体上,所述一号电动推杆906、接近传感器908和图像采集模块7均由控制板4控制。
42.所述支腿模块2包括一号伺服电机201、二号伺服电机202、三号伺服电机203、电机固定架204、小腿旋转轴205、小腿连接杆206、大腿连接杆207、大腿杆件208和橡胶足端209,所述一号伺服电机201固定安装在挡板支架101上,所述电机固定架204安装在一号伺服电机201的输出轴上,所述二号伺服电机202和三号伺服电机203分别安装在电机固定架204的左右两侧,且所述二号伺服电机202和三号伺服电机203同轴设置,所述小腿旋转轴205固定安装在二号伺服电机202的输出轴上,所述小腿连接杆206的一端铰接在小腿旋转轴205的一侧,所述小腿连接杆206的另一端与大腿杆件208的一端铰接,所述大腿连接杆207的一端与三号伺服电机203的输出轴铰接,所述大腿连接杆207的另一端与大腿杆件208铰接,所述小腿连接杆206两端的铰接点与大腿连接杆207两端的铰接点共同构成平行四边形,所述橡胶足端209安装在大腿杆件208的下端。
43.所述平行四杆模块3包括升降电机301,所述升降电机301安装在挡板支架101的中部,在所述升降电机301的输出轴上通过梯度齿轮轴302安装有一号锥齿轮303,在所述一号
锥齿轮303的左右两侧分别啮合连接有二号锥齿轮304和三号锥齿轮305,所述二号锥齿轮304和三号锥齿轮305安装在同一锥齿轮轴306上,所述锥齿轮轴306的两端分别安装在两个l型固定架307上,所述l型固定架307安装在挡板支架101上,所述二号锥齿轮304的轮毂侧固定连接有一号升降杆308,在所述一号升降杆308的另一端铰接有二号升降杆309,所述二号升降杆309的另一端与四号升降杆310的一端铰接,所述四号升降杆310的中部与三号升降杆311的一端铰接,在所述二号升降杆309与四号升降杆310之间的铰接轴以及四号升降杆310与三号升降杆311之间的铰接轴上均设置有隔离套筒312,所述三号升降杆311的另一端通过锁紧套筒1006与三号锥齿轮305的轮毂侧滑动连接,所述四号升降杆310用于带动前轮转向模块6或后轮驱动模块8升降和左右平移,在所述锥齿轮轴306以及四号升降杆310与三号升降杆311之间的隔离套筒312上均设置有可分离卡环313,在两个可分离卡环313之间连接有辅助弹簧314。
44.所述轮毂平移模块10包括三号固定架1001和伸缩杆1002,所述三号固定架1001固定安装在躯体框架模块1上,在所述三号固定架1001上固定安装有二号电动推杆1003,所述二号电动推杆1003的另一端固定连接有推杆轴1004,在所述推杆轴1004的另一端固定连接有分离拨杆1005,所述分离拨杆1005的另一端卡装在锁紧套筒1006上的凹槽内,所述锁紧套筒1006滑动设置在锥齿轮轴306上,所述三号升降杆311固定连接在锁紧套筒1006上,当所述锁紧套筒1006与三号锥齿轮305轮毂侧的限位槽配合时,其可与三号锥齿轮305一同转动,当锁紧套筒1006滑动至另一侧时,锁紧套筒1006与三号锥齿轮305分离,锁紧套筒1006与l型固定架307上的锁紧槽配合,可实现锁紧套筒1006的锁紧;所述伸缩杆1002滑动设置在连接管102上,所述伸缩杆1002的下端与前轮转向模块6或后轮驱动模块8固定连接。
45.所述前轮转向模块6包括两个一号安装架601,在所述一号安装架601上安装有滚轮602,在所述一号安装架601的上端转动连接有一号连接杆603,两个一号连接杆603分别与一号连接座604的两端固定连接,在所述一号连接座604的中部固定连接有转向电机605,在所述一号安装架601的内侧固定连接有t型套筒606,在所述t型套筒606的竖直杆上转动连接有转向短杆607,两个所述转向短杆607分别与转向长杆608的两端转动连接,所述转向长杆608的中部与所述转向电机605的输出轴固定连接,所述一号连接杆603与对应的伸缩杆1002固定连接,所述一号连接座604与对应的四号升降杆310转动连接。
46.所述后轮驱动模块8包括两个二号安装架801,在所述二号安装架801内安装有无刷轮毂电机802,在所述二号安装架801的上端固定连接有二号连接杆803,两个二号连接杆803分别与二号连接座804的两端固定连接,所述二号连接杆803与对应的伸缩杆1002固定连接,所述二号连接座804与对应的四号升降杆310转动连接。
47.所述一号分离体01和二号分离体02还包括电磁铁模块11,所述电磁铁模块11包括电磁铁固定架1101和电磁铁1102,所述电磁铁1102安装在电磁铁固定架1101上,所述电磁铁固定架1101安装在左右两侧的连接管102之间,并与连接管102固定连接,所述控制板4安装在电磁铁固定架1101上,所述控制板4包括4g模块和gps模块,所述4g模块用于进行远程数据传输,所述gps模块用于实现精准定位。
48.工作原理:当机器人遇到多点勘探或者躯体一侧受到剧烈破损的情况时,为了使机器人分离时躯体的稳定,首先控制板4发送指令使得升降电机301驱动平行四杆模块3升降,前轮转向模块6与后轮驱动模块8同步下放距离地面一定高度,一号分离体01和二号分
离体02下侧的二号电动推杆1003伸长,带动锁紧套筒1006脱离三号锥齿轮305,直到锁紧套筒1006上的方形条进入l型固定架307,此时三号锥齿轮305与三号升降杆311脱离,并与l型固定架307锁定,故三号升降杆311不得转动,驱动升降电机301,则平行四杆模块3只有二号锥齿轮304为其转动提供动力,从而带动前轮转向模块6和后轮驱动模块8向躯体中间设定位置移动,完成后调整四条支腿模块2令前轮转向模块6与后轮驱动模块8全部接触地面,之后控制板4令一号电动推杆906更换电流方向使楔形块905收缩,止推杆904在复位弹簧903的作用下回缩脱离环形槽909,一号分离体01和二号分离体02此时轴向松弛,控制板4命令支腿模块2配合前轮转向模块6或后轮驱动模块8缓慢移动,直到锁紧轴901与t型特殊套筒902完全分离,此时一号分离体01和二号分离体02变换为双足双轮机器人进行独立作业。
49.对于一号分离体01,位于其上的控制板4拥有处理图像信息的计算能力,一号分离体01分离后,位于其上的支腿模块2继续执行对角步态带动一号分离体01前进或者后退,转向时两个支腿模块2可配合前轮转向模块6快速转向;对于二号分离体02,位于其上的控制板4一方面能够接受远程控制信息,另一方面也能脱离主机指令独立操控二号分离体02移动,而带有无刷轮毂电机802的后轮驱动模块8与两个支腿模块2可共同提供动力,且运行速度一致时可使躯体运动,或只有两个支腿模块2单独提供动力来带动轮毂转动也可实现目的,两个支腿模块2在运行步态时改变偏航角能带动二号分离体02整体更改行走方向。
50.当一号分离体01和二号分离体02完成独立的任务之后,控制板4搭载的4g模块和gps模块通过远程网络传输当前的位置信息,并自动规划路径准备进行组合,当两者相遇时,首先调整方向使得锁紧轴901与t型特殊套筒902相对,一号分离体01和二号分离体02通过支腿模块2与前轮转向模块6或后轮驱动模块8的配合逐渐靠近,图像采集模块7利用旋转云台调整观察方位捕捉彼此距离,直到达到设定阈值,一号分离体01和二号分离体02调整姿态精确定位轴孔配合位置,紧接着开始组合,直到机器人前轮转向模块6与后轮驱动模块8行走出现打滑趋势,并且此时接近传感器908也检测到t型特殊套筒902,从而被触发,则轴孔配合完成,控制板4命令一号电动推杆906转换电流方向,一号电动推杆906伸长推出楔形块905,如此使得止推杆904压缩复位弹簧903到达环形槽909处,此时孔轴锁紧,轴向难以窜动。控制板4控制支腿模块2变形支撑躯体框架模块1抬升至指定高度,使动前轮转向模块6或后轮驱动模块8脱离地面一定高度,随后二号锥齿轮304转动,带动前轮转向模块6和后轮驱动模块8向躯体两侧设定位置移动,到达指定位置后,控制板4指令二号电动推杆1003收缩,带动锁紧套筒1006靠近三号锥齿轮305,使得三号升降杆311与三号锥齿轮305同步转动,如此二号锥齿轮304与三号锥齿轮305同速反向转动,可实前轮转向模块6或后轮驱动模块8的上下移动,升降电机301带动平行四杆模块3将前轮转向模块6或后轮驱动模块8提升到指定高度,四足机器人便重新恢复到腿部运行模式去执行操纵员指定任务。
51.以上显示和描述了本发明的主要特征和优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
52.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当
将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。