技术特征:
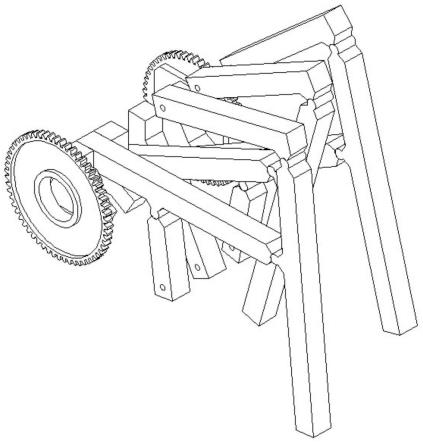
1.一种螃蟹机器人的行走机构,其特征在于,包括机架,机架的中心安装有主动驱动组件,主动驱动组件两侧的机架上各安装有一个从动驱动组件,机架的两端即从动驱动组件远离主动驱动组件的一侧,各设置有一个大腿安装轴和支撑杆安装轴,支撑杆安装轴位于大腿安装轴的正下方;螃蟹机器人行走机构共有六个仿生腿,每侧有三个,两侧的仿生腿相对机架的中心轴对称设置,单侧的三个仿生腿固定连接在从动驱动组件上,主动驱动组件带动两个从动驱动组件相对机架向机器人的同一侧转动,三个仿生腿随从动驱动组件转动的相位差为120
°
。2.根据权利要求1所述的螃蟹机器人的行走机构,其特征在于,从动驱动组件包括两个大齿轮和由四个曲柄构成的曲轴,单个曲柄具有三个连接端,三个连接端之间的转动相位差为120
°
,相邻两个曲柄的相同连接端之间通过连杆固定连接,四个曲柄之间的三个连杆之间的相位差为120
°
,位于曲轴两端的两个曲柄分别与一个大齿轮固定连接。3.根据权利要求2所述的螃蟹机器人的行走机构,其特征在于,每个仿生腿均包括传动杆、支撑杆、小腿和大腿,大腿的一端与小腿一端转动连接,大腿的另一端转动连接在机架的大腿安装轴上,传动杆的一端转动连接在靠近小腿长度方向的中心位置处,传动杆的另一端固定连接在曲轴上,支撑杆的一端转动连接在靠近传动杆长度方向的中心位置处,支撑杆的另一端转动连接在机架的支撑杆安装轴上。4.根据权利要求3所述的螃蟹机器人的行走机构,其特征在于,主动驱动组件包括电机、涡轮、蜗杆及涡轮蜗杆安装架,涡轮蜗杆安装架固定连接在机架的主动驱动组件安装位上,电机固定安装于机架顶端,电机的输出轴竖直向下设置;蜗杆竖向转动连接在涡轮蜗杆安装架,蜗杆的上端固连在电机的输出轴上,蜗杆的下端转动连接在涡轮蜗杆安装架底端,涡轮与蜗杆啮合传动,且安装涡轮的转轴上同轴连接有两个小齿轮,两个小齿轮分别位于涡轮的两侧,且每个小齿轮位于同一端的两个从动驱动组件的大齿轮之间,并与两个大齿轮啮合。5.根据权利要求4所述的螃蟹机器人的行走机构,其特征在于,主动驱动组件包括两个电机和两个蜗杆,两个蜗杆竖向转动连接在涡轮蜗杆安装架上,两个蜗杆的顶端分别与一个电机的输出轴固定连接,涡轮啮合连接于两个蜗杆之间,两个电机均固定安装于机架顶端。6.根据权利要求5所述的螃蟹机器人的行走机构,其特征在于,两个电机同步带动两个蜗杆同步转动,共同带动涡轮转动,涡轮带动两个小齿轮同步转动,并分别驱动两个从动驱动组件的大齿轮转动,从而带动螃蟹机器人的两个从动驱动组件向同一个方向转动,两侧的驱动传动杆使小腿在大腿的配合下向该方向移动,使两侧共三组仿生腿按120
°
相位差依次移动。
技术总结
本发明公开了一种螃蟹机器人的行走机构,包括机架,机架的中心安装有主动驱动组件,主动驱动组件两侧的机架上各安装有一个从动驱动组件,机架的两端即从动驱动组件远离主动驱动组件的一侧,各设置有一个大腿安装轴和支撑杆安装轴,支撑杆安装轴位于大腿安装轴的正下方;螃蟹机器人行走机构共有六个仿生腿,每侧有三个,两侧的三个仿生腿相对机架的中心轴对称设置,单侧的三个仿生腿固定连接在从动驱动组件上,主动驱动组件带动两个从动驱动组件相对机架向机器人的同一侧转动,三个仿生腿随从动驱动组件转动的相位差为120
技术研发人员:祁航 张玉佩 杨晋雅 王嘉伟 张余凡
受保护的技术使用者:河海大学
技术研发日:2022.04.15
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。