1.本发明涉及医疗器械技术领域,特别涉及一种双臂操作手系统。
背景技术:
2.手术机器人在外科手术中使用范围越来越广泛,手术机器人能够辅助医生进行更精准的操作,在使用手术机器人的外科手术过程中,医生通过操作主操作手机械臂接收运动,从机械臂在主操作手机械臂的控制下执行相应的操作。为了准确的接收医生的动作,部分手术机器人设置有双臂操作手系统,现有的双臂操作手系统大多通过电信号设备接收医生动作,通过电信号将动作传递至机器人的执行机构,由于动作经过多次信号转化,动作执行时存在偏差的可能性,无法实现精确的动作传导和力反馈,同时,部分双臂操作手系统的机械臂存在各自由度相互干涉无法解耦的情况。
技术实现要素:
3.本发明提供了一种双臂操作手系统,其目的是为了解决现有双臂操作手系统无法实现精确动作传导的问题。
4.为了达到上述目的,本发明的实施例提供了一种双臂操作手系统,包括:
5.支撑横梁,所述支撑横梁上滑动地设置有两组操作手机械臂,两组所述操作手机械臂对称设置,每组所述操作手机械臂均设置有肩关节机构、大臂机构、小臂机构和操作手机构;
6.所述肩关节机构包括机械臂连接部、肩关节座和肩关节轴,所述肩关节座通过所述肩关节轴转动地设置所述机械臂连接部内;
7.所述大臂机构包括手臂伸缩驱动连杆、手臂上下驱动连杆和手臂摇杆,所述手臂摇杆的一端转动地设置在所述肩关节座内,所述手臂摇杆的另一端与所述手臂上下驱动连杆的上端转动地连接,所述手臂伸缩驱动连杆的上端转动地设置在所述肩关节座内;
8.所述小臂机构包括小臂主体和伸缩臂,所述伸缩臂滑动地设置在所述小臂主体内,所述手臂伸缩驱动连杆的下端转动地连接所述小臂主体的后端,所述手臂上下驱动连杆的下端转动地连接所述小臂主体的中部;
9.所述操作手机构包括操作手支座、操作手环套和剪切驱动机构,所述操作手支座转动地设置在所述伸缩臂的前端,所述操作手环套转动地设置在所述操作手支座上,所述操作手环套的内圈转动地设置在所述操作手环套的外圈上,所述剪切驱动机构设置在所述操作手环套的内圈上。
10.其中,所述肩关节轴上绕设有手臂旋转驱动钢丝,所述操作手支座设置有手腕左右旋转驱动钢丝,所述操作手环套的外圈设置有手腕上下旋转驱动钢丝,所述操作手环套的内圈设置有手腕整体旋转驱动钢丝。
11.其中,所述肩关节座内转动地设置有手臂伸缩驱动轴,所述手臂伸缩驱动连杆通过所述手臂伸缩驱动轴转动地设置在所述肩关节座内,所述手臂伸缩驱动轴绕设有手臂伸
缩驱动钢丝;所述肩关节座内固定设置有手臂伸缩自由度平衡电机,所述手臂伸缩自由度平衡电机与所述手臂伸缩驱动轴固定连接。
12.其中,所述肩关节座内转动地设置有手臂上下驱动轴,所述手臂摇杆通过所述手臂上下驱动轴转动地设置在所述肩关节座内,所述手臂上下驱动轴绕设有手臂上下驱动钢丝;所述肩关节座内固定设置有手臂上下自由度平衡电机,所述手臂上下自由度平衡电机与所述手臂上下驱动轴固定连接。
13.其中,所述剪切驱动机构通过剪切连接杆设置在所述操作手环套的内圈,所述操作手环套的内圈通过轴承转动地设置在所述操作手环套的外圈内侧,所述操作手环套的内圈设置有抓手。
14.其中,所述剪切驱动机构包括两个驱动锥齿轮,两个所述驱动锥齿轮相对设置,两个所述驱动锥齿轮的一侧设置有从动锥齿轮,所述从动锥齿轮分别与两个所述驱动锥齿轮啮合,两个所述驱动锥齿轮均设置有驱动手柄,所述驱动手柄的端头分别设置有驱动指环;所述从动锥齿轮设置有齿轮端和滚轮端,所述从动锥齿轮的滚轮端绕设有剪切驱动钢丝。
15.其中,所述驱动手柄的端头设置有两自由度指环调节关节,所述两自由度指环调节关节包括第一调节轴和第二调节轴,所述第一调节轴转动地穿设在所述驱动手柄的端头,所述第二调节轴转动地穿设在所述第一调节轴上,所述驱动指环固定设置在所述第二调节轴上。
16.其中,所述支撑横梁上设置有平移直线导轨和平移锁紧支撑轴,所述操作手机械臂通过所述平移直线导轨滑动地设置在所述支撑横梁上,所述操作手机械臂设置有平移锁定机构,所述操作手机械臂通过所述平移锁定机构与所述平移锁紧支撑轴连接。
17.其中,所述平移锁定机构包括刹车机构,所述刹车机构设置在所述操作手机械臂的顶部一侧,所述刹车机构设置有第一刹车杠杆和第二刹车杠杆,所述第一刹车杠杆和第二刹车杠杆均转动地设置在旋转销轴上,所述第一刹车杠杆和第二刹车杠杆的第一端紧贴所述平移锁紧支撑轴设置,所述第一刹车杠杆和第二刹车杠杆的第二端之间设置有平移制动预紧弹簧。
18.其中,所述平移锁定机构还包括解锁机构,所述解锁机构设置在所述肩关节座的一侧,所述解锁机构设置有解锁手柄,所述解锁手柄连接解锁钢丝的一端,所述解锁钢丝的另一端连接在第一刹车杠杆的第二端底部。
19.本发明的上述方案有如下的有益效果:
20.本发明所述的双臂操作手系统设置有支撑横梁以及两组滑动设置在支撑横梁上的操作手机械臂,操作手机械臂设置有肩关节机构、大臂机构、小臂机构和操作手机构,机械臂能够通过肩关节机构实现手臂旋转运动,大臂机构能够带动小臂机构上下运动以及前后运动,操作手机构能够实现手腕左右旋转、上下旋转和整体旋转运动,操作手机构设置的剪切驱动机构能够用于传递剪切运动,本发明的操作手机械臂能够通过平移锁定机构调节在支撑横梁上的位置,每个操作手机械臂七个自由度之间完全解耦,并能够通过驱动钢丝传动,主操作手机械臂运动时各个自由度互不干涉,均可独立运动。
附图说明
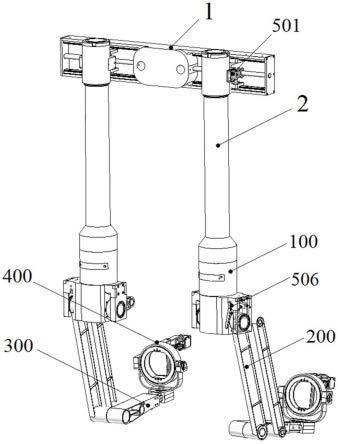
21.图1为本发明的双臂操作手系统的结构示意图;
22.图2为本发明的双臂操作手系统的操作手机械臂结构示意图;
23.图3为本发明的双臂操作手系统的肩关节机构、大臂机构及小臂机构结构示意图;
24.图4为本发明的双臂操作手系统的肩关节机构示意图;
25.图5为本发明的双臂操作手系统的肩关节机构与大臂机构连接示意图一;
26.图6为本发明的双臂操作手系统的肩关节机构与大臂机构连接示意图二;
27.图7为本发明的双臂操作手系统的操作手机构结构示意图;
28.图8为本发明的双臂操作手系统的剪切驱动机构结构示意图;
29.图9为本发明的双臂操作手系统的剪切驱动结构剖切示意图;
30.图10为本发明的双臂操作手系统的操作手机械臂与支撑横梁连接示意图;
31.图11为本发明的双臂操作手系统的操作手机械臂与支撑横梁局部连接示意图;
32.图12为本发明的双臂操作手系统的刹车机构结构示意图;
33.图13为本发明的双臂操作手系统的解锁机构结构示意图。
34.【附图标记说明】
35.1-支撑横梁;2-操作手机械臂;10-平移直线导轨;11-平移锁紧支撑轴;100-肩关节机构;101-机械臂连接部;102-肩关节座;103-肩关节轴;104-手臂旋转驱动钢丝;200-大臂机构;201-手臂伸缩驱动连杆;202-手臂上下驱动连杆;203-手臂摇杆;204-手臂伸缩驱动轴;205-手臂伸缩驱动钢丝;206-手臂伸缩自由度平衡电机;207-手臂上下驱动轴;208-手臂上下驱动钢丝;209-手臂上下自由度平衡电机;210-手臂伸缩驱动滚轮;211-手臂上下驱动滚轮;300-小臂机构;301-小臂主体;302-伸缩臂;303-紧固螺栓;400-操作手机构;401-操作手支座;402-操作手环套;403-剪切驱动机构;404-手腕左右旋转驱动钢丝;405-手腕上下旋转驱动钢丝;406-手腕整体旋转驱动钢丝;407-剪切连接杆;408-抓手;409-驱动锥齿轮;410-从动锥齿轮;411-驱动手柄;412-驱动指环;413-剪切驱动钢丝;414-剪切驱动机构外壳;415-第一调节轴;416-第二调节轴;500-平移锁定机构;501-刹车机构;502-第一刹车杠杆;503-第二刹车杠杆;504-旋转销轴;505-平移制动预紧弹簧;506-解锁机构;507-解锁安装座;508-解锁手柄;509-解锁钢丝;510-导向滚轮。
具体实施方式
36.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
37.本发明针对现有主操作手机械臂的问题,提供了一种双臂操作手系统。
38.如图1至图6所示,本发明的实施例提供了一种双臂操作手系统,包括:支撑横梁1,所述支撑横梁1上滑动地设置有两组操作手机械臂2,两组所述操作手机械臂2对称设置,每组所述操作手机械臂2均设置有肩关节机构100、大臂机构200、小臂机构300和操作手机构400;肩关节机构100,所述肩关节机构100包括机械臂连接部101、肩关节座102和肩关节轴103,所述肩关节座102通过所述肩关节轴103转动地设置所述机械臂连接部101内;大臂机构200,所述大臂机构200包括手臂伸缩驱动连杆201、手臂上下驱动连杆202和手臂摇杆203,所述手臂摇杆203的一端转动地设置在所述肩关节座102内,所述手臂摇杆203的另一端与所述手臂上下驱动连杆202的上端转动地连接,所述手臂伸缩驱动连杆202的上端转动地设置在所述肩关节座102内;小臂机构300,所述小臂机构300包括小臂主体301和伸缩臂
302,所述伸缩臂302滑动地设置在所述小臂主体301内,所述手臂伸缩驱动连杆201的下端转动地连接所述小臂主体301的后端,所述手臂上下驱动连杆202的下端转动地连接所述小臂主体301的中部;操作手机构400,所述操作手机构400包括操作手支座401、操作手环套402和剪切驱动机构403,所述操作手支座401转动地设置在所述伸缩臂302的前端,所述操作手环套402转动地设置在所述操作手支座401上,所述操作手环套402的内圈转动地设置在所述操作手环套402的外圈上,所述剪切驱动机构403设置在所述操作手环套402的内圈上。
39.本发明实施例所述的双臂操作手系统通过机械臂连接部101安装在机器人的支撑横梁1上,所述肩关节轴103通过轴承设置在所述机械臂连接部101内,所述肩关节轴103底部为肩关节座102,所述肩关节轴103能够通过相对所述机械臂连接部101旋转实现机械臂整体旋转运动;所述手臂伸缩驱动连杆201、手臂上下驱动连杆202、手臂摇杆203以及小臂主体301共同构成四边形机构,当所述手臂伸缩驱动连杆201在所述肩关节座102内旋转时能够带动所述小臂主体301前后运动,实现机械臂的前后伸缩,当所述手臂摇杆203在所述肩关节座102内旋转时会带动所述手臂上下驱动连杆202升降进而带动所述小臂结构3的前端上下抬升实现机械臂的上下运动,所述操作手机构400用于接收手腕的运动,剪切驱动机构403能够接收并传递操作者手指的剪切运动;所述小臂主体301的底部设置有紧固螺栓303,用于对所述伸缩臂302的滑动位置实施紧固。
40.其中,所述肩关节轴103上绕设有手臂旋转驱动钢丝104,所述操作手支座401设置有手腕左右旋转驱动钢丝404,所述操作手环套402的外圈设置有手腕上下旋转驱动钢丝405,所述操作手环套402的内圈设置有手腕整体旋转驱动钢丝406。
41.所述肩关节轴103绕设有所述手臂旋转驱动钢丝104,所述手臂旋转驱动钢丝104的两端分别从所述机械臂连接部101上的两个通孔引出,随所述肩关节轴103转动,所述手臂旋转驱动钢丝104的两端能够分别异向运动;所述操作手支座401的底部固定设置有操作手支座转轴,所述操作手支座转轴转动地设置在所述伸缩臂302前端,所述操作手支座转轴上绕设有手腕左右旋转驱动钢丝404,所述手腕左右旋转驱动钢丝404的两端由所述伸缩臂302前端面的两个通孔引出,随着所述操作手支座转轴的转动,所述手腕左右旋转驱动钢丝404的两端能够分别异向运动;所述操作手环套402的外圈两侧分别设置有转轴,所述操作手环套402的外圈两侧的转轴分别通过深沟球轴承转动地设置在所述操作手支座401的两侧,所述操作手环套402的一侧转轴绕设有所述手腕上下旋转驱动钢丝405,所述手腕上下旋转驱动钢丝405的两端由所述操作手支座401的一侧前端两个通孔引出,随着所述操作手环套402相对所述操作手支座401转动,所述手腕上下旋转驱动钢丝405的两端能够分别异向运动;所述操作手环套402的内圈和外圈之间设置有两组深沟球轴承,所述操作手环套402的内圈绕设有所述手腕整体旋转驱动钢丝406,所述手腕整体旋转驱动钢丝406的两端分别从所述操作手支座401的两侧通孔中引出,随着所述操作手环套402的内圈和外圈相对转动,所述手腕整体旋转驱动钢丝406的两端能够分别异向运动;
42.如图4和图5所示,所述肩关节座102内转动地设置有手臂伸缩驱动轴204,所述手臂伸缩驱动连杆201通过所述手臂伸缩驱动轴204转动地设置在所述肩关节座102内,所述手臂伸缩驱动轴204绕设有手臂伸缩驱动钢丝205。
43.其中,所述肩关节座102内固定设置有手臂伸缩自由度平衡电机206,所述手臂伸
缩自由度平衡电机206与所述手臂伸缩驱动轴204固定连接。
44.其中,所述肩关节座102内转动地设置有手臂上下驱动轴207,所述手臂摇杆203通过所述手臂上下驱动轴207转动地设置在所述肩关节座102内,所述手臂上下驱动轴207绕设有手臂上下驱动钢丝208。
45.其中,所述肩关节座102内固定设置有手臂上下自由度平衡电机209,所述手臂上下自由度平衡电机209与所述手臂上下驱动轴207固定连接。
46.本发明实施例所述的双臂操作手系统,所述手臂伸缩驱动轴204和手臂上下驱动轴207均通过轴承转动地设置在所述肩关节座102内,通过所述手臂伸缩自由度平衡电机206平衡所述手臂伸缩驱动连杆201的重力,通过所述手臂上下自由度平衡电机209平衡所述手臂上下驱动连杆202的重力;所述手臂伸缩驱动轴204的外侧设置有手臂伸缩驱动滚轮210,所述手臂伸缩驱动钢丝205绕设在所述手臂伸缩驱动滚轮210上,随着所述手臂伸缩驱动连杆201相对所述肩关节座102旋转,所述手臂伸缩驱动钢丝205的两端会分别异向运动;所述手臂上下驱动轴207的外侧设置有手臂上下驱动滚轮211,所述手臂上下驱动钢丝208绕设在所述手臂上下驱动滚轮211上,随着所述手臂摇杆203相对所述肩关节座102转动,所述手臂上下驱动钢丝208的两端会分别异向运动。
47.如图6至图8所示,所述剪切驱动机构403通过剪切连接杆407设置在所述操作手环套402的内圈,所述操作手环套402的内圈通过轴承转动地设置在所述操作手环套402的外圈内侧,所述操作手环套402的内圈设置有抓手408。
48.本发明实施例所述的双臂操作手系统,所述抓手408能够方便操作人员抓持固定。
49.其中,所述剪切驱动机构403包括两个驱动锥齿轮409,两个所述驱动锥齿轮409相对设置,两个所述驱动锥齿轮409的一侧设置有从动锥齿轮410,所述从动锥齿轮410分别与两个所述驱动锥齿轮409啮合,两个所述驱动锥齿轮409均设置有驱动手柄411,所述驱动手柄411的端头分别设置有驱动指环412;所述从动锥齿轮410设置有齿轮端和滚轮端,所述从动锥齿轮410的滚轮端绕设有剪切驱动钢丝413。
50.本发明实施例所述的双臂操作手系统,所述剪切驱动机构403设置有剪切驱动机构外壳414,所述驱动锥齿轮409和从动锥齿轮410均转动地设置所述在剪切驱动机构外壳414内,所述驱动指环412通过操作者的手指控制,操作者通过所述驱动指环412控制两个所述驱动手柄411张开时,所述从动锥齿轮410会朝一向旋转,当所述驱动指环412控制两个所述驱动手柄411闭合时,所述从动锥齿轮410会逆向旋转,由于所述从动锥齿轮410的滚轮端绕设有剪切驱动钢丝413因此所述剪切驱动钢丝413的两端会随所述从动锥齿轮的转动而传递运动信号。
51.如图7和图8所示,所述驱动手柄411的端头设置有两自由度指环调节关节,所述驱动指环412通过所述两自由度指环调节关节与所述驱动手柄411连接。
52.其中,所述两自由度指环调节关节包括第一调节轴415和第二调节轴416,所述第一调节轴415转动地穿设在所述驱动手柄411的端头,所述第二调节轴416转动地穿设在所述第一调节轴415上,所述驱动指环412固定设置在所述第二调节轴416上。
53.本发明实施例所述的双臂操作手系统,所述驱动指环412能够通过所述第一调节415轴向外侧翻转,通过所述第二调节轴416向前后翻转,因此所述驱动指环412能够调整到最适配于操作者使用的角度。
54.如图1、10、11、12和13所示,所述支撑横梁1上设置有平移直线导轨10和平移锁紧支撑轴11,所述操作手机械臂2通过所述平移直线导轨10滑动地设置在所述支撑横梁1上,所述操作手机械臂2设置有平移锁定机构500,所述操作手机械臂2通过所述平移锁定机构500与所述平移锁紧支撑轴11连接。
55.其中,所述平移锁定机构500包括刹车机构501,所述刹车机构501设置在所述操作手机械臂2的顶部一侧,所述刹车机构501设置有第一刹车杠杆502和第二刹车杠杆503,所述第一刹车杠杆502和第二刹车杠杆503均转动地设置在旋转销轴504上,所述第一刹车杠杆502和第二刹车杠杆503的第一端紧贴所述平移锁紧支撑轴11设置,所述第一刹车杠杆502和第二刹车杠杆503的第二端之间设置有平移制动预紧弹簧505。
56.其中,所述平移锁定机构还包括解锁机构506,所述解锁机构506设置在所述肩关节座102的一侧,所述解锁机构506设置有解锁安装座507,所述解锁安装座507上铰接有解锁手柄508,所述解锁手柄508的一端连接解锁钢丝509的一端,所述解锁钢丝509的另一端连接在第一刹车杠杆502的第二端底部。
57.本发明所述的双臂操作手系统,所述操作手机械臂2的机械臂连接部101设置有滑块,通过滑块设置在所述平移直线导轨10,所述第一刹车杠杆502和第二刹车杠杆503的第一端夹持锁定在所述平移锁紧支撑轴11上,通过旋转销轴504所述第一刹车杠杆502和第二刹车杠杆503形成夹子状结构,同时平移制动预紧弹簧505能够使得所述第一刹车杠杆502和第二刹车杠杆503在没有外力作用下始终夹紧所述平移锁紧支撑轴11上,此时所述操作手机械臂2不能沿所述支撑横梁1滑动;所述解锁手柄508为杠杆状结构,所述解锁手柄508的上端设置有所述解锁钢丝509,解锁钢丝509沿解锁安装座507内的导向滚轮510导向至所述刹车机构501,从所述第二刹车杠杆503的第二端穿过连接至所述第一刹车杠杆502的第二端底部,当按压所述解锁手柄508的下端时会带动所述解锁钢丝509运动,进而带动所述第二刹车杠杆503的第二端向下运动压缩所述平移制动预紧弹簧505,同时所述第一刹车杠杆502和第二刹车杠杆503解锁平移锁紧支撑轴11,此时所述操作手机械臂2能够沿所述支撑横梁1自由滑动。
58.本发明所述的双臂操作手系统能够通过平移锁定机构调节操作手机械臂在支撑横梁上的位置,操作手机械臂实现手臂整体旋转运动,小臂机构的伸缩、上下运动以及前后运动,操作手机构能够实现手腕左右旋转、上下旋转和整体旋转运动,操作手机构设置的剪切驱动机构能够用于传递剪切运动,本发明的七个自由度之间完全解耦,并能够通过驱动钢丝传动,主操作手机械臂运动时各个自由度互不干涉,均可独立运动。
59.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。