技术特征:
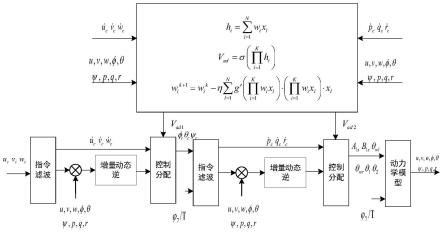
1.一种高速直升机的飞行控制方法,其特征在于,建立系统控制函数与舵面实际操纵信号相关的高速直升机非仿射非线性动力学系统,所述高速直升机非仿射非线性动力学系统根据姿态内回路输出的舵面实际操纵信号实时更新高速直升机的速度、姿态角、姿态角速度;建立跟随高速直升机飞行系统期望速度跟踪指令的速度外回路,所述速度外回路对高速直升机的速度、姿态角、姿态角速度进行滤波后再进行基于增量动态逆模型的控制分配,输出姿态内回路期望控制指令,在所述基于增量动态逆模型的控制分配中引入将速度外回路控制系统补偿为线性传递关系的第一伪线性控制信号;建立跟随姿态内回路期望控制指令的姿态内回路,所述姿态内回路对高速直升机的速度、姿态角、姿态角速度进行滤波后再进行基于增量动态逆模型的控制分配,输出舵面实际操纵信号,在所述基于增量动态逆模型的控制分配中引入将姿态内回路控制系统补偿为线性传递关系的第二伪线性控制信号。2.根据权利要求1所述一种高速直升机的飞行控制方法,其特征在于,所述高速直升机非仿射非线性动力学系统包含两个子系统,其中,x1为非仿射非线性动力学系统变化相对较慢的状态向量,x2为非仿射非线性动力学系统变化相对较快的状态向量,x1=[u,v,w],u,v,w为机体坐标轴系下的三个速度分量,x2=[p,q,r],p,q,r为机体坐标轴系下的三个角速度分量,为非仿射非线性动力学系统状态向量x1,x2的导数,u1为度虚拟控制指令,u2为角速度虚拟控制指令,f1(.)为速度外回路的状态函数,g1(.)为速度外回路的控制函数,f2(.)为姿态内回路的状态函数,g2(.)为姿态内回路的控制函数。3.根据权利要求1或2所述一种高速直升机的飞行控制方法,其特征在于,由pi-sigma神经网络对速度外回路期望控制指令各分量的导数、高速直升机的速度、高速直升机的姿态角、高速直升机的姿态角速度进行预测得到第一伪线性控制信号的补偿信号;由pi-sigma神经网络对输入的姿态内回路期望控制指令各分量的导数、高速直升机的速度、高速直升机的姿态角、高速直升机的姿态角速度进行预测得到第二伪线性控制信号的补偿信号。4.根据权利要求3所述一种高速直升机的飞行控制方法,其特征在于,所述第一伪线性控制信号的补偿信号以及第二伪线性控制信号通过表达式预测,其中,v
ad
为pi-sigma神经网络对标量输入的预测结果,σ为隐藏层到输出层的非线性传递函数,h
i
为第i个隐藏层的输出,k为隐藏层的数量,n为输入节点的数量,w
i
为第i个隐藏层的可调权重,x
l
为第l个输入节点的标量输入。5.根据权利要求4所述一种高速直升机的飞行控制方法,其特征在于,采用梯度下降法更新所述pi-sigma神经网络的权重。6.根据权利要求5所述一种高速直升机的飞行控制方法,其特征在于,更新所述pi-sigma神经网络的权重的表达式为:其中,w
ik 1
、
w
ik
为第i个隐藏层可调权重的第k 1次、第k次更新值,η为pi-sigma神经网络的学习率,为隐藏层实际输出与理想输出的误差。7.根据权利要求4所述一种高速直升机的飞行控制方法,其特征在于,所述速度外回路对高速直升机的速度、姿态角、姿态角速度进行滤波后再进行基于增量动态逆模型的控制分配的飞行控制律为:u1=u
10
δu1,其中,u1为速度虚拟控制指令,u
10
为速度虚拟控制指令的采样信号,δu1为u1的增量,为速度外回路控制函数g1(.)在u1变化方向上的梯度,为速度外回路期望控制指令状态向量[u
c
,v
c
,w
c
]的一阶导数,u
c
为前飞速度,v
c
为升降速度,w
c
为偏航速度,v
l1
为第一伪线性控制信号,u,v,w为机体坐标轴系下的实时三轴速度分量,为非仿射非线性动力学系统变化相对较慢状态向量的导数,k
p1
和k
i1
为速度外回路线性控制系数,v
ad1
为第一伪线性控制信号的补偿信号。8.根据权利要求4所述一种高速直升机的飞行控制方法,其特征在于,所述姿态内回路对高速直升机的速度、姿态角、姿态角速度进行滤波后再进行基于增量动态逆模型的控制分配的飞行控制律为:u2=u
20
δu2,其中,u2为角速度虚拟控制指令,u
20
为角速度虚拟控制指令的采样信号,δu2为u2的增量,为姿态内回路控制函数g2(.)在u2变化方向上的梯度,为姿态回路期望控制指令状态向量[φ
c
,θ
c
,ψ
c
]的导数,φ
c
为俯仰角,θ
c
为偏航角,ψ
c
为滚转角,[p
c
,q
c
,r
c
]为[φ
c
,θ
c
,ψ
c
]的二阶导数,v
l2
为第二伪线性控制信号,为非仿射非线性动力学系统变化相对较快状态向量的导数,k
p2
和k
i2
为姿态内回路线性控制系数,v
ad2
为第二伪线性控制信号的补偿信号。
技术总结
本发明公开一种高速直升机的飞行控制方法,属于计算、推算或计数的技术领域。针对高速直升机多模态控制,基于内姿态控制回路和外速度控制回路组成的增量动态逆控制框架,采用Pi-Sigma神经网络补偿增量动态逆控制误差,保证控制系统的稳定性、快速性和鲁棒性。快速性和鲁棒性。快速性和鲁棒性。
技术研发人员:郑峰婴 熊博威 沈志敏 范涛 许梦园 王峰 陈宇昂
受保护的技术使用者:南京航空航天大学
技术研发日:2022.03.30
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。