1.本发明涉及控制技术领域,具体地涉及一种兼容运动中目标位置更新的s型曲线规划方法及系统。
背景技术:
2.目前机械加工制造领域,高频的点到点运动是比较常见的现象,同时由于校正和补偿等功能需求,运动过程中进行补偿后往往会更新目标位置,例如贴片机在贴装元器件时,运动过程中摄像机飞拍元器件后更新目标位置和校正角度。在一些特殊的高频点到点运动控制领域,如贴片机运动控制,在运动过程中可能需要进行位置校正,从而导致目标位置在运动工程中发生改变需要更新曲线规划。传统位置规划方式一般不考虑运动过程中的目标位置改变,都是到达就的目标位置后设定新的目标位置重新进行位置曲线规划,然而,这种方式并增长了到达新目标位置的时间,在实际加工中降低了生产效率。
技术实现要素:
3.本发明的目的是为了克服现有技术存在的问题,本发明提出了一种兼容运动中目标位置更新的s型曲线规划方法及系统,基于三角函数运算,支持带有初速度的曲线规划,兼容运动过程中目标位置改变后直接进行重新位置曲线规划,有效提高了生产效率。
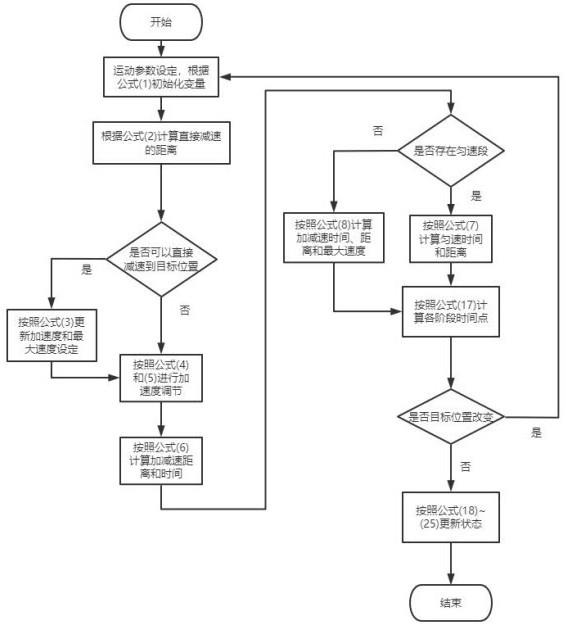
4.为了实现上述目的,本发明第一方面提供了一种兼容运动中目标位置更新的s型曲线规划方法,包括以下步骤:将曲线规划分为7个阶段:加速段的加加速度段,加速段的匀加速段,加速段的减加速段,匀速段,减速段的加加速度段,减速段的匀加速段,减速段的减加速段;设定并初始化曲线规划的运动参数;根据运动参数计算曲线规划中直接减速的距离,并判断是否可以直接减速;依据判断结果计算加速到最大速度的加速时间t
acc
和加速距离s
acc
;根据所述加速时间t
acc
和加速距离s
acc
计算各阶段的时间点;实时检测是否有新的目标位置,若否,则根据时间点更新曲线规划各阶段状态;若是,则返回至初始步骤重新规划。
5.本发明第二方面提供了一种兼容运动中目标位置更新的s型曲线规划系统,包括:划分模块,用于将曲线规划分为7个阶段:加速段的加加速度段,加速段的匀加速段,加速段的减加速段,匀速段,减速段的加加速度段,减速段的匀加速段,减速段的减加速段;运动参数模块,用于设定并初始化曲线规划的运动参数;判断模块,用于根据运动参数计算曲线规划中直接减速的距离,并判断是否可以直接减速;计算模块,用于依据判断结果计算加速到最大速度的加速时间t
acc
和加速距离s
acc
;
时间点模块,用于根据所述加速时间t
acc
和加速距离s
acc
计算各阶段的时间点;检测更新模块,用于实时检测是否有新的目标位置,若否,则根据时间点更新曲线规划各阶段状态;若是,则返回至初始步骤重新规划。
6.本发明第三方面提供了一种种贴片机,包括存储器,存储有程序;处理器,用于执行所述存储器中的所述程序,以实现上述兼容运动中目标位置更新的s型曲线规划方法的步骤;驱动器,用于响应所述曲线规划过程,以实现贴片机的实际运动控制。
7.通过上述技术方案,基于三角函数运算,通过曲线规划的设计策略实现在运动过程中目标位置改变后可直接重新进行位置规划,兼容运动过程中目标位置改变并进行重新位置曲线规划的方法,支持带初始速度的曲线规划,能够很大程度的提高运行效率,并且方法中各种情况区分条件清晰,公式简洁,运算复杂度低,能够广泛适用于定位运动控制中。
附图说明
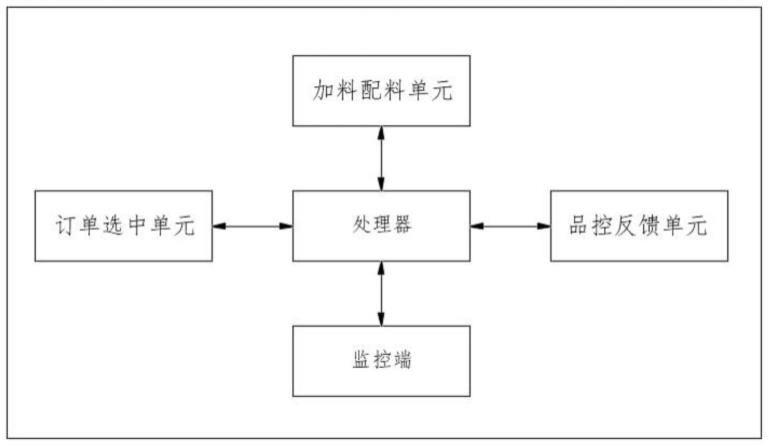
8.图1是本发明兼容运动中目标位置更新的s型曲线规划方法及系统示意图;图2为本发明实施例1的实时位置p
t
的曲线;图3为本发明实施例1的实时速度v
t
曲线;图4为本发明实施例1的实时加速度a
t
曲线;图5为本发明实施例1的实时加加速度j
t
曲线;图6为本发明实施例2的实时位置p
t
的曲线;图7为本发明实施例2的实时速度v
t
曲线;图8为本发明实施例2的实时加速度a
t
曲线;图9为本发明实施例2的实时加加速度j
t
曲线;图10为本发明实施例3的实时位置p
t
的曲线;图11为本发明实施例3的实时速度v
t
曲线;图12为本发明实施例3的实时加速度a
t
曲线;图13为本发明实施例3的实时加加速度j
t
曲线。
具体实施方式
9.以下结合附图对本发明实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施例,并不用于限制本发明实施例。
10.本发明第一方面提供一种兼容运动中目标位置更新的s型曲线规划方法,如图1所示,包括:将曲线规划分为7个阶段:加速段的加加速度段,加速段的匀加速段,加速段的减加速段,匀速段,减速段的加加速度段,减速段的匀加速段,减速段的减加速段;将曲线规划分为7段式,加加速度连续的非对称三角函数7段式s型曲线规划方法中采用分段实现加加速度连续,速度曲线点到点运动非对称的多段式曲线规划。
11.设定并初始化曲线规划的运动参数;具体包括:运动参数设定:设定新目标位置p
e1
、当前位置ps、移动距离s、最大速度
vm、最大速度数值vs、平均加速度a、平均加速度数值as和曲线规划各阶段的时间点如下:加速段t
0-t3,匀速段t
3-t4,减速段t
4-t7,加速段的加加速度段t
0-t1,加速段的匀加速段t
1-t2,加速段的减加速段t
2-t3,减速段的加加速度段t
4-t5,减速段的匀加速段t
5-t6,减速段的减加速段t
6-t7;其中当设定位移较小时,加减速过程距离已经大于等于设定位移时,不存在匀速阶段即t
3=
t4;设置柔化因子0《β≤1,β为减速段与加速段的平均加速度的比值,和加速度系数1《k≤2,k为减速段或加速段内的最大加速度与平均加速度的比值;曲线规划计算过程中的参数设定如下:当前时刻t,时间间隔为dt、实时位置p
t
、实时运动距离s
t
、实时速度v
t
、实时加速度a
t
、实时加加速度j
t
;根据公式(1)初始化运动参数:
ꢀꢀ
(1)其中,t为当前时刻,ν
t
为t时刻实时速度,a
t
为t时刻实时加速度,s
t
为t时刻实时运动距离,p
t
为t时刻实时位置,v0为初始速度。注意:s=p
e1-ps》0则正方向运动,s=p
e1-ps《0则反方向运动。
12.根据运动参数计算曲线规划中直接减速的距离,并判断是否可以直接减速;曲线规划中直接减速的距离s
dec1
和减速时间t
dec1
公式如下:
ꢀꢀ
(2),根据公式(2)计算直接减速的距离;判断是否可以直接减速到目标位置:若s《s
dec1
,则最大速度vm和平均加速度a数值分别取其相反数,即更新为公式(3),否则不变:(3),其中vs为vm数值的绝对值,as为a数值的绝对值。
13.依据判断结果计算加速到最大速度的加速时间t
acc
和加速距离s
acc
;最大速度的加速时间t
acc
和加速距离s
acc
的计算公式如下:
ꢀꢀ
(4)值得注意的是,如果此时计算出t
acc
过小,意味着短时间进行快速的加速度变化,可能会造成加速度冲击过大,可引入加速段调节因子α(0《α≤1),α可以与t
acc
成函数关系,例如存在加加速度平均值限制jm,
(5)当时(即t
acc
过小),进而重新计算加速到最大速度的加速时间t
acc
和加速距离s
acc
、最大速度减速到0对应的减速时间t
dec
和减速距离s
dec
,公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀ
(6)。
14.由此,根据公式(4)和公式(5)进行加速度调节,按照公式(6)计算加、减速距离和时间。
15.根据所述加速时间t
acc
和加速距离s
acc
计算各阶段的时间点;具体包括以下过程:判断是否存在匀速段,计算匀速时间t
avg
和匀速距离s
avg
:若abs(s)》abs(s
acc
s
dec
),则存在匀速段,公式如下:
ꢀꢀꢀ
(7),若abs(s)≤abs(s
acc
s
dec
),则不存在匀速段,则需重新计算能够到达的最大速度vm、加速时间t
acc
和减速时间t
dec
以及对应的加速距离s
acc
、减速距离s
dec
,公式如下:
ꢀꢀ
(8)。
16.进一步地,当α=1时,则意味着不必考虑短时间进行快速的加速度变化,可能会造成加速度冲击过大的问题,公式(8)即转换为 。
17.根据加速时间t
acc
、匀速时间t
avg
和减速时间t
dec
计算各阶段的时间点,具体如下:根据公式(6)(7)或者公式(8)计算出加速、匀速和减速时间,因此可以首先得到三个时间点:t
3 = t
acc
,t
4 = t
acc t
avg
,t
7 = t
4 t
dec
ꢀꢀ
(9)为了保证加速度连续且加速度均值,引入最大加速度与加速度均值设定的比值k,k值的作用在于防止设定平均加速度对应的最大加速度过大(1《k≤2),硬件驱动能力不够
的情况,k值优选设置在1.5-2之间,按照整个加速段按照如下设计:(10)利用加速度进行积分运算,可以计算出t
0-t
acc
(t3)的各个段累计的速度dv为::
ꢀꢀ
:::为了保证位置规划的连续性和准确性,需确保t3(t
acc
=t
a1
t
a2
t
a3
)时刻加速度达到最大速度vm,有
ꢀꢀꢀꢀ
( 11 )实际设定k值后,根据公式(11),可以解出t
a1
、t
a2
与k和t
acc
之间的关系为
ꢀꢀꢀꢀꢀ
( 12 ) 一般设置为加加速阶段和减加速阶段对称,即加加速阶段用时t
a1
=减加速阶段用时t
a3
,可以得到:
ꢀꢀꢀ
(13)最终可以计算出加速阶段的时间点t1和t2:
ꢀꢀꢀꢀ
(14)。
18.减速阶段也分为三个时间点,与加速段计算方式对应,有:
ꢀꢀꢀ
(15)即减速度段的时间点t5和t6为:
ꢀꢀꢀꢀꢀꢀꢀ
(16)。
19.总结各个时间段为:
ꢀꢀ
(17)。
20.由公式(17)计算曲线规划各个时间点的数值。如果存在匀速段,且设置加速度系数k《2时,曲线规划为正常的7段式曲线规划,包括加速段的加加速度段,加速段的匀加速段,加速段的减加速段,匀速段,减速段的加加速度段,减速段的匀加速段,减速段的减加速段。如果不存在匀速段,则t3=t4。如果设置k=2时,则t1=t2,t4=t5,不存在匀加速段,此时整个曲线规划变为5段式,包括加速段的加加速度段,加速段的减加速段,匀速段,减速段的加加速度段,减速段的减加速段。如果设置柔化因子β《1,实现曲线规划为加速与减速非对称曲线;如果设置β=1,此时曲线规划为加速与减速对称曲线。其中,t
a1
=t
a3
可以作为具体实施方式的一种取值,当两者不相等时,需满足公式(12)。加速段的k值与减速段的k值可以相等也可以不相等,上述讨论均默认为相等。
21.实时检测是否有新的目标位置,若否,则根据时间点更新曲线规划各阶段状态;若是,则返回至初始步骤重新规划;以dt为时间间隔,时间t从t0累加至t7,检测是否有新的目标位置p
e1
,若旧的目标位置p
e0
不等于p
e1
,则有新的目标位置,返回至初始步骤,即重新将曲线规划分为7个阶段重新规划,循环各步骤直至满足若旧的目标位置p
e0
=p
e1
;若p
e0
=p
e1
,则没有新的目标位置,整个曲线规划过程的实时加加速度j
t
、实时加速度α
t
、实时速度ν
t
更新公式如下:第一段:,
ꢀꢀꢀ
(18)第二段:,
ꢀꢀꢀꢀꢀꢀꢀꢀ
(19)第三段:
,
ꢀꢀꢀ
(20)第四段:,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)第五段:,
ꢀꢀꢀꢀ
(22)第六段:
ꢀꢀꢀ
(23)第七段:,
ꢀꢀꢀ
(24)整个曲线规划过程中的实时运动距离s
t
和实时位置p
t
更新为: (25)。
22.位置控制的曲线规划能够影响定位精度和稳定时间,保证加加速度连续,同时降低减速度段的加速度值能够降低到位的振动,从而提升定位精度和稳定时间表现。本发明的方法通过公式(2)计算直接减速距离,与目标距离判断是否需要进行加速度和速度反向,
引入加速度调节因子α,通过公式(4)和公式(5)进行加速段加速度调节,避免加加速度过大导致硬件故障;通过比较加减速总距离与目标距离的大小判断是否存在匀速段,存在匀速段则采用公式(6)和公式(7)计算加减速时间和最大速度,如果不存在匀速段则采用公式(8)计算加减速时间和最大速度,并通过公式(17)计算最终的各个时间点;在时间更新和运动过程中判断是否更新了新的目标位置,如果更新了新的目标位置,则重新开始从公式(1)参数初始化开始新的曲线规划,更新速度、加速度和各个时间点;如果未更新目标位置,通过公式(18)-公式(25)实时更新加加速度,加速度,速度和位置状态。通过分段的三角函数关系式设计保证曲线规划的加加速度连续、加速度连续、速度和位移满足曲线规划的设定值需求;通过减速度段的柔化因子β(0《β≤1),实现加、减速曲线非对称的曲线规划,其中,0《β《1是速度曲线非对称,β=1,可实现速度对称的曲线规划特例;通过设定加速度系数k(0《k≤2),避免为了保证平均加速度值而导致最大加速度超过物理限制,其中,当1《k《2时,曲线规划为7段式曲线规划,k=2时,可实现不包含匀加速阶段的5段式曲线规划特例。综上,本发明通过曲线规划的设计策略实现在运动过程中目标位置改变后可直接重新进行位置规划,且保证减速段加加速度和加速度连续,通过分段的三角函数关系式设计保证减速段的加加速度连续,加速度连续,同时能够兼容带初始速度的位置曲线规划。
23.基于上述兼容运动中目标位置更新的s型曲线规划方法,本发明第二方面提供一种兼容运动中目标位置更新的s型曲线规划系统,包括:划分模块,用于将曲线规划分为7个阶段:加速段的加加速度段,加速段的匀加速段,加速段的减加速段,匀速段,减速段的加加速度段,减速段的匀加速段,减速段的减加速段;运动参数模块,用于设定并初始化曲线规划的运动参数;判断模块,用于根据运动参数计算曲线规划中直接减速的距离,并判断是否可以直接减速;计算模块,用于依据判断结果计算加速到最大速度的加速时间t
acc
和加速距离s
acc
;时间点模块,用于根据所述加速时间t
acc
和加速距离s
acc
计算各阶段的时间点;检测更新模块,用于实时检测是否有新的目标位置,若否,则根据时间点更新曲线规划各阶段状态;若是,则返回至初始步骤重新规划。
24.本发明第三方面提供一种贴片机,包括存储器,存储有程序;处理器,用于执行所述存储器中的所述程序,以实现上述兼容运动中目标位置更新的s型曲线规划方法的步骤;驱动器,用于响应所述曲线规划过程,以实现贴片机的实际运动控制。
25.本发明的方法、系统及贴片机支持带初始速度的曲线规划,并保证减速度段加加速度和加速度连续,能够很大程度的提高运行效率和降低到位冲击。并且方案中各种情况区分条件清晰,公式简洁,运算复杂度低,能够广泛适用于定位运动控制中。
26.实施例1:初始化曲线规划参数,假设当前位置ps=0m,新的目标位置p
e1
=0.4m,设定初始速度为v0=1m/s,最大速度数值为vs=3m/s,平均加速度数值as=30m/s2,根据公式(1)初始化运动
参数,命名减速段与加速段的平均加速度的比值为柔化因子,命名减速段或加速段内的最大加速度与平均加速度的比值为加速度系数且减速段与加速段内的加速度系数相等(以下实施例相同)。令柔化因子β=1,加速度系数k=1.5,即此时7段式曲线为对称曲线,最大加速度为平均加速度的1.5倍。根据公式(2)按当前速度计算曲线规划中直接减速的距离s
dec1
=0.0167m《s,因此最大速度和加速度不变,根据公式(4)计算加速时间t
acc
和加速距离s
acc
为:。
27.根据公式(5)判断α=1,因此按照公式(6)继续计算出减速段时间t
dec
=0.1s和减速距离s
dec
=0.15m。由于abs(s)》abs(s
acc
s
dec
),可知曲线规划存在匀速段,根据公式(7)计算出匀速距离s
avg
=0.1167m和匀速时间t
avg
=0.0389s。
28.然后根据加速时间t
acc
、匀速时间t
avg
和减速时间t
dec
计算各阶段的时间点及加速度系数k=1.5,按照公式(17)计算出各个时间段: ,以dt为时间间隔,时间t从t0累加至t7,按照公式(18)-公式(25)开始更新实时加加速度、实时加速度、实时速度和实时距离。更新时检测是否有新的目标位置,即p
e0
≠p
e1
,这里假设在t=0.1s时,此时位置为0.2333m,接受到新的目标位置为p
e1
=0.5m,则需返回至初始化参数并重新规划7段式各个阶段,有
,保持柔化因子β=1,加速度系数k=1.5。根据公式(2)按当前速度计算曲线规划中直接减速的距离s
dec1
=0.15m《s,因此最大速度和加速度不变,由于目前速度已经为最大速度,根据公式(4)实际计算出加速时间t
acc
=0s和加速距离s
acc
=0m。按照公式(6)继续计算出减速段时间t
dec
=0.1s和减速距离s
dec
=0.15m。由于abs(s)》abs(s
acc
s
dec
),可知曲线规划存在匀速段,根据公式(7)计算出匀速距离s
avg
=0.1167m和时间t
avg
=0.0389s。
29.然后根据加速时间t
acc
、匀速时间t
avg
和减速时间t
dec
计算各阶段的时间点及加速度系数k=1.5,按照公式(17)计算出各个时间段: ,以dt为时间间隔,时间t重新开始从t0累加至t7,按照公式(18)-公式(25)开始更新实时加加速度、实时加速度、实时速度和实时位置。假设达到目标位置之前不再出现新的目标位置,最终实施例1的曲线规划结果如图2-图5所示,实线为目标位置更新前的状态轨迹,点线为目标位置更新后新的状态轨迹。
30.实施例1实现了对称的7段式曲线规划。图2为实施例1的实时位置的曲线,在0.1s时位置为0.2667m,此时更新目标位置为0.5m之后重新规划,最终曲线规划到达最终位置0.5m;图3为实施例1的实时速度曲线,初始速度1m/s,速度连续最大到达3m/s,0.1s位置更新时仍需保持匀速运行,最后减速至0m/s;图4为实施例1的实时加速度曲线,加速度连续且最大加速度为45m/s2为平均加速度的1.5倍;图5为实施例1的实时加加速度曲线,加加速度连续且终值为0。实施例1的结果表明本发明方法能够处理目标位置变化到更远距离的重新规划问题。减速段状态均连续,能够最大程度的降低到位振动。
31.实施例2:初始化曲线规划参数,假设当前位置ps=0m,新的目标位置p
e1
=0.4m,设定初始速度为v0=-1m/s,最大速度数值为vs=3m/s,平均加速度数值as=30m/s2,根据公式(1)初始化运动参数
,令柔化因子β=0.75,加速度系数k=1.5,即此时7段式曲线为非对称曲线,减速段的加速度值为加速段的0.75倍,最大加速度为平均加速度的1.5倍。根据公式(2)按当前速度计算曲线规划中直接减速的距离s
dec1
=-0.0222m《s,因此最大速度和加速度方向不变,根据公式(4)计算加速时间t
acc
和加速距离s
acc
为。
32.根据公式(5)判断,因此按照公式(6)继续计算出减速段时间t
dec
=0.1333s和减速距离s
dec
=0.2m。由于abs(s)》abs(s
acc
s
dec
),可知曲线规划存在匀速段,根据公式(7)计算出匀速距离s
avg
=0.0667m和匀速时间t
avg
=0.0222s。
33.然后根据加速时间t
acc
、匀速时间t
avg
和减速时间t
dec
计算各阶段的时间点及加速度系数k=1.5,按照公式(17)计算出各个时间段: ,以dt为时间间隔,时间t从t0累加至t7,按照公式(18)-公式(25)开始更新实时加加速度、实时加速度、实时速度和实时距离。更新时检测是否有新的目标位置,即p
e0
≠p
e1
,这里假设在t=0.15s时,此时位置为0.1833m,接受到新的目标位置为p
e1
=0.5m,则需返回至初始化参数并重新规划7段式各个阶段,有,保持柔化因子β=0.75,加速度系数k=1.5。根据公式(2)按当前速度计算曲线规划中直接减速的距离s
dec1
=0.15m《s,因此需按照公式(3)对最大速度vm和平均加速度a数值分
别取其相反数,即: ,根据公式(4)实际计算出加速时间t
acc
=0.2s和加速距离s
acc
=-0.3m。按照公式(6)继续计算出减速段时间t
dec
=0.1333s和减速距离s
dec
=-0.2m。由于abs(s)《abs(s
acc
s
dec
),可知曲线规划不存在匀速段,则需重新计算能够到达的最大速度vm、加速时间t
acc
和减速时间t
dec
以及对应的加速距离s
acc
、减速距离s
dec
,根据公式(8)得到,然后根据加速时间t
acc
、匀速时间t
avg
和减速时间t
dec
计算各阶段的时间点及加速度系数k=1.5,按照公式(17)计算出各个时间段: ,以dt为时间间隔,时间t重新开始从t0累加至t7,按照公式(18)-公式(25)开始更新实时加加速度、实时加速度、实时速度和实时位置。假设达到目标位置之前不再出现新的目标位置,最终实施例2的曲线规划结果如图6-图9所示,实线为目标位置更新前的状态轨迹,点线为目标位置更新后新的状态轨迹。
34.实施例2实现了非对称的7段式曲线规划。图6为实施例2的实时位置的曲线,在0.15s时位置为0.1833m,此时更新目标位置为0m之后重新规划,最终曲线规划到达最终位置0m;图7为实施例2的实时速度曲线,初始速度-1m/s,速度连续最大到达1m/s,0.15s位置更新时需进行立即反向加速至-2.9277m/s;图8为实施例2的实时加速度曲线,加速度连续且最大加速度为45m/s2为平均加速度的1.5倍;图9为实施例2的实时加加速度曲线,加加速度连续且终值为0。实施例2的结果表明本发明方法能够处理目标位置变化到反向位置的重新规划问题。减速段状态均连续,能够最大程度的降低到位振动。
35.实施例3:初始化曲线规划参数,假设当前位置ps=0m,新的目标位置p
e1
=0.1m,设定初始速度为v0=1m/s,最大速度数值为vs=3m/s,平均加速度数值as=30m/s2,根据公式(1)初始化运动参数
,令柔化因子β=0.75,加速度系数k=1.5,即此时7段式曲线为非对称曲线,减速段的加速度值为加速段的0.75倍,最大加速度为平均加速度的1.5倍。根据公式(2)按当前速度计算曲线规划中直接减速的距离s
dec1
=0m《s,因此最大速度和加速度方向不变,根据公式(4)计算加速时间和加速距离为。
36.根据公式(5)判断α=1,因此按照公式(6)继续计算出减速段时间t
dec
=0.1333s和加速距离s
dec
=0.2m。由于abs(s)《abs(s
acc
s
dec
),可知曲线规划不存在匀速段,即匀速距离s
avg
=0m和匀速时间t
avg
=0s。需重新计算能够到达的最大速度vm、加速时间t
acc
和减速时间t
dec
以及对应的加速距离s
acc
、减速距离s
dec
然后根据加速时间t
acc
、匀速时间t
avg
和减速时间t
dec
计算各阶段的时间点及加速度系数k=1.5,按照公式(17)计算出各个时间段: ,以dt为时间间隔,时间t从t0累加至t7,按照公式(18)-公式(25)开始更新实时加加速度、实时加速度、实时速度和实时距离。更新时检测是否有新的目标位置,即p
e0
≠p
e1
,这里假设在t=0.1s时,此时位置为0.0968m,速度为0.4335m/s,接受到新的目标位置为p
e1
=0.15m,则需返回至初始化参数并重新规划7段式各个阶段,有
ꢀ
,此时柔化因子β=0.75,更改加速度系数k=2,此时减速段不存在匀减速段。根据公式(2)按当前速度计算曲线规划中直接减速的距离s
dec1
=0.0042m《s,因此最大速度vm和平均加速度a数值保持不变,根据公式(4)实际计算出加速至最大速度所需的时间t
acc
=0.2085s和加速距离s
acc
=0.1469m。按照公式(6)继续计算出减速段时间t
dec
=0.1333s和减速距离s
dec
=0.2m。由于abs(s)《abs(s
acc
s
dec
),可知曲线规划不存在匀速段,则需重新计算能够到达的最大速度vm、加速时间t
acc
和减速时间t
dec
以及对应的加速距离s
acc
、减速距离s
dec
,根据公式(8)得到,然后根据加速时间t
acc
、匀速时间t
avg
和减速时间t
dec
计算各阶段的时间点及加速度系数k=2,按照公式(17)计算出各个时间段: ,以dt为时间间隔,时间t重新开始从t0累加至t7,按照公式(18)-公式(25)开始更新实时加加速度、实时加速度、实时速度和实时位置。假设达到目标位置之前不再出现新的目标位置,最终实施例3的曲线规划结果如图10-图13所示,实线为目标位置更新前的状态轨迹,点线为目标位置更新后新的状态轨迹。
37.实施例3实现了非对称的7段式曲线规划。图10为实施例3的实时位置的曲线,在0.1s时位置为0.0968m,此时更新目标位置为0.15m之后重新规划,最终曲线规划到达最终位置0.15m;图11为实施例3的实时速度曲线,初始速度0m/s,首次位置规划不存在匀速段,速度最大到达1.6036m/s,0.1s位置更新时速度为0.4335m/s,需进行立即加速至1.2039m/s后减速至0m/s;图12为实施例3的实时加速度曲线,首次位置规划设置k=1.5,加速度连续且最大加速度为45m/s2为平均加速度的1.5倍,目标位置改变后k被更改设置为k=2,此时不存在匀加速段,加速度连续且最大加速度为60m/s2为平均加速度的2倍;图13为实施例3的实
时加加速度曲线,加加速度连续且终值为0。实施例3的结果表明本发明方法能够处理目标位置变化到更远位置,需再次加速的重新规划问题,且更改k而调整分段数量,减速段状态均连续,能够最大程度的降低到位振动。
38.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于此。在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型包括各个具体技术特征以任何合适的方式进行组合。为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。但这些简单变型和组合同样应当视为本发明所公开的内容,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。