1.本发明涉及医疗设备技术领域,具体涉及一种应用于医疗机器人的电动助力推车及其操控方法。
背景技术:
2.现有推车可简单分为三类,即纯手动型、助力型、自动型。
3.1、纯手动型虽说操纵简单,但是如果在其车身上搭载大质量的设备,则对推车的人员很不友好,操纵起来十分困难,即不适用于大质量医疗机器人的搭载平台。
4.2、现有助力型推车系统基本可以做到简单移动大质量医疗机器人的使用需求,但是目前市面上见到助力推车控制把多为大行程按钮控制(按压式,有按压开关感)和旋转手把控制(类似电动车手把控制方式),这两种控制方式无法根据传统的推动手动推车的方式判断操纵者的使用意图。
5.3、自动型即为agv小车式,需要铺设专用轨道,此种不适用于现代医院环境。
6.因此,有必要研发一种电动的助力设备来解决采用人力推动大质量医疗设备困难的问题。
技术实现要素:
7.针对上述存在的技术问题,本发明目的是提供一种应用于医疗机器人的电动助力推车及其操控方法,给移动大质量机器人带来了便利,使挪动医疗设备更便利,解决了纯人力推动大质量医疗设备困难的问题及现有电动助力推车没有传统手动推车的驱动感觉的问题。
8.本发明的技术方案是:
9.本发明的其中一个目的在于提供一种应用于医疗机器人的电动助力推车的操控方法,所述的电动助力推车包括有控制箱、推把及与所述控制箱电连接的驱动轮,所述推把上安装有与所述控制箱电连接的微变形阵列应力感应系统,所述微变形阵列应力感应系统包括左感应区和右感应区,所述左感应区和右感应区对应于推把的前方和后方各设有一个感应区,每个感应区上设有沿所述推把的长度方向呈阵列排布的若干感应器,所述的操控方法包括以下步骤:
10.判断使用者为单手操控还是双手操控;
11.控制箱根据单手操控或双手操控执行不同的控制策略以控制推车执行相应的运动。
12.优选地,在判断使用者为单手操控还是双手操控的步骤中:
13.判断每个感应区是否有至少两个感应器受力,如是,则判断该感应区受力,令其为受力区。
14.优选地,在判断使用者为单手操控还是双手操控的步骤中,当判断该感应区受力时,
15.如只有一个感应区受力,则判断为单手操控;
16.如有两个感应区受力且两个感应区处于推把的宽度方向的同侧,则判断为单手操控;
17.如有两个感应区受力且两个感应区处于推把的宽度方向的异侧或者长度方向的同侧或者有三个以上的感应区受力,则判断为双手操控。
18.优选地,如判断为双手操控,则控制策略为:
19.s1、根据采集到的每个感应区的所有受力的感应器的受力值计算出该感应区的合力;
20.s2、计算出对应每个驱动轮的前后两个感应区的合力的差值以判断出推车是前进或后退或转弯或静止;
21.s3、最后控制箱根据合力的差值与对应的驱动轮的转速成正相关的关系计算得到对应的驱动轮的转速并控制对应的驱动轮以计算得到的转速行走。
22.优选地,在判断为双手操控的步骤中,将左感应区的前方感应区规定为左前感应区、后方感应区描述为左后感应区,右感应区的前方感应区规定为右前感应区、后方感应区描述为右后感应区,左前感应区的合力命为f
左前
、左后感应区的合力命为f
左后
、右前感应区的合力命为f
右前
、右后感应区的合力命为f
右后
;
23.如f
左后-f
左前
=f
右后-f
右前
>0,则推车向正前方运动;
24.如f
左后-f
左前
=f
右后-f
右前
<0,则推车向正后方运动;
25.如f
左后-f
左前
=f
右后-f
右前
=0,则推车静止不动;
26.如f
左后-f
左前
>0,且f
左后-f
左前
>|f
右后-f
右前
|,则推车向右前方运动;
27.如f
右后-f
右前
>0,且f
右后-f
右前
>|f
左后-f
左前
|,则推车向左前方运动;
28.如f
左前-f
左后
>0,且f
左前-f
左后
>|f
右前-f
右后
|,则推车向右后方运动;
29.如f
右前-f
右后
>0,且f
右前-f
右后
>|f
左前-f
左后
|,则推车向左后方运动。
30.优选地,如判断为单手操控,则控制策略为:
31.s1、根据采集到的感应器的受力值分别计算出前后感应区的受力区的所有感应器的合力值,并进行比较以判断出推车前进还是后退;
32.s2、分别计算前后感应区的受力区的对应的感应器的合力值并去除合力为零的感应器;
33.s3、再判断受力的两个感应区上受力的感应器的数量是为≥2的偶数个还是>2的奇数个;
34.s31、如为偶数个,则将受力的感应器沿左右方向对半平分成对应左驱动轮的左半部分和对应右驱动轮的右半部分,分别计算左半部分的几个感应器的合力的差值和右半部分的几个感应器的合力的差值,最后控制箱根据合力的差值与对应的驱动轮的转速成正相关的关系计算得到对应的驱动轮的转速并控制对应的驱动轮以计算得到的转速行走;
35.s32、如受力的感应器的数量为奇数个,则去除中间的感应器,取左右两侧的感应器分别对应左驱动轮和右驱动轮,并分别计算合力的差值,最后控制箱根据合力的差值与对应的驱动轮的转速成正相关的关系计算得到对应的驱动轮的转速并控制对应的驱动轮以计算得到的转速行走。
36.优选地,当左右两个驱动轮同向转动且转速相同时,则推车前进或后退;
37.当左右两个驱动轮同向转动且转速不同时,则推车往转速慢的驱动轮的方向转弯;
38.当左右两个驱动轮反向转动且转速相同时,则推车原地旋转。
39.优选地,左右两个驱动轮的转速差越大,转弯半径越小。
40.本发明的另一个目的在于提供一种应用于医疗机器人的电动助力推车,包括车架、设于所述车架底部后端的驱动轮和设于所述车架底部前端的万向轮、设于所述车架上的用于为所述驱动轮供电并可作为备用电源的电池及设于所述车架上的与所述驱动轮电连接的控制箱,所述车架的后端上方设有推把,所述推把安装有微变形阵列应力感应系统,所述微变形阵列应力感应系统与所述控制箱电连接且在使用者手握推拉过程中执行上述任一项的操控方法。
41.优选的,所述推把沿其长度方向分为对应于左驱动轮的左感应区和对应于右驱动轮的右感应区,所述左感应区和右感应区对应于推把的前方和后方各设有一个感应区;
42.所述微变形阵列应力感应系统包括设于每个感应区内的电路板、设于对应电路板上的沿所述推把的长度方向呈阵列排布的若干感应器、设于电路板外侧的覆盖硅胶膜及与每个感应器一一对应电连接且突出于对应的覆盖硅胶膜外的触压凸起。
43.与现有技术相比,本发明的优点是:
44.本发明的一种应用于医疗机器人的电动助力推车,通过在推把上设置微变形阵列应力感应系统,通过微变形阵列应力感应系统在使用者使用时触压感应器执行相应的操控方法。可作为医疗机器人的搭载平台,搭载各式各样的医疗设备,给移动大质量机器人带来了便利,使挪动医疗设备更便利,拥有传统人力手推车的操纵感。
附图说明
45.下面结合附图及实施例对本发明作进一步描述:
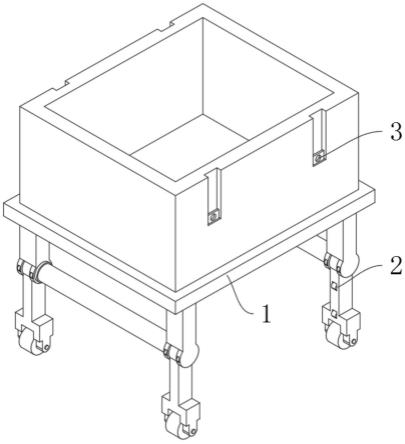
46.图1为本发明实施例的应用于医疗机器人的电动助力推车的立体结构示意图;
47.图2为本发明实施例的应用于医疗机器人的电动助力推车的推把及微变形阵列应力感应系统(其中省略了右后感应区的覆盖硅胶膜)的立体结构示意图;
48.图3为本发明实施例的应用于医疗机器人的电动助力推车的推把及微变形阵列应力感应系统的俯视结构示意图。
49.其中:1、车架;2、驱动轮;3、控制箱;4、电池;5、推把;6、微变形阵列应力感应系统;60、感应区;601、左前感应区;602、左后感应区;603、右前感应区;604、右后感应区;61、电路板;62、感应器;63、触压凸起;64、覆盖硅胶膜。
具体实施方式
50.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
51.参见图1至图3,本发明实施例的一种应用于医疗机器人的电动助力推车的操控方法,其中电动助力推车包括车架1、设于车架1底部后端的一左一右两个驱动轮2和设于车架
1底部前端的一左一右两个万向轮,设于车架1上的用于为驱动轮2供电并可作为备用电源的电池4及设于车架1上的与驱动轮2电连接的控制箱3,车架1的后端上方设有推把5,推把5安装有微变形阵列应力感应系统,微变形阵列应力感应系统6包括左感应区和右感应区,左感应区和右感应区对应于推把5的前方和后方各设有一个感应区60,每个感应区60上设有沿推把5的长度方向呈阵列排布的若干(至少两个)通过触压产生感应的感应器62。
52.如图1所示,本发明实施例的助力推车,在结构上,与普通的助力推车相比,在于车架1的后端上多了一块电池4以及车架1的后端的推把5上安装了微变形阵列应力感应系统6,该电池4除了给驱动轮2提供电能,还可以作为备用电源使用。从功能上讲,本发明实施例的助力推车,相比于普通的助力推车,其区别在于微变形阵列应力感应系统6以及操控方法。
53.微变形阵列应力感应系统与控制箱3电连接且在使用者手握推拉过程中执行上述的操控方法,具体的,操控方法包括以下步骤:
54.判断使用者为单手操控还是双手操控;
55.控制箱根据单手操控或双手操控执行不同的控制策略以控制推车执行相应的运动。
56.具体的,如判断为双手操控,控制策略为:
57.s1、根据采集到的每个感应区60的所有受力的感应器62的受力值计算出该感应区60的合力;
58.s2、计算出对应每个驱动轮2的前后两个感应区60的合力的差值以判断出推车是前进或后退或转弯或静止;
59.s3、最后控制箱3根据合力的差值与对应的驱动轮2的转速成正相关的关系计算得到对应的驱动轮2的转速并控制对应的驱动轮2以计算得到的转速行走。
60.如判断为单手操控,控制策略为:
61.s1、根据采集到的感应器62的受力值计算出前后感应区的受力区的所有感应器62的合力值,以判断出推车前进还是后退;
62.s2、分别计算前后感应区的受力区的对应的感应器62的合力值并去除合力为零的感应器62;
63.s3、再判断受力的两个感应区60上受力的感应器62的数量是为≥2的偶数个还是>2的奇数个;
64.s31、如为偶数个,则将受力的感应器62沿左右方向对半平分成对应左驱动轮的左半部分和对应右驱动轮的右半部分,分别计算左半部分的几个感应器62的合力的差值和右半部分的几个感应器62的合力的差值,最后控制箱3根据合力的差值与对应的驱动轮2的转速成正相关的关系计算得到对应的驱动轮2的转速并控制对应的驱动轮2以计算得到的转速行走;
65.s32、如受力的感应器62的数量为奇数个,则去除中间的感应器62,取左右两侧的感应器62分别对应左驱动轮和右驱动轮,并分别计算合力的差值,最后控制箱3根据合力的差值与对应的驱动轮2的转速成正相关的关系计算得到对应的驱动轮2的转速并控制对应的驱动轮2以计算得到的转速行走。
66.针对不同的操控方式(单手或双手)采用不同的操控策略,通过在推把5上安装了
微变形阵列应力感应系统6,使助力推车拥有了和传统手动推车的操纵感,解决了现有助力推车没有传统手动推车的驱动感觉(即向前推力越大车子移动越快,往后拉力越大后退越快)。给移动大质量机器人带来了便利,使挪动医疗设备更便利。
67.更具体的,在判断使用者为单手操控还是双手操控的步骤中:
68.首先应判断每个感应区60是否有至少两个感应器62受力,如是,则判断该感应区60受力(推力或拉力),令其为受力区,其他情况比如只有一个感应器62受力或者没有感应器62受力,则判断该感应区60没有受力。
69.接着,再判断使用者是单手操控还是双手操控。具体的,如四个感应区60中只有一个感应区60受力,则判断为单手操控。需要说明的是,左感应区和右感应区是有一段空白的,所以单手操控是无法同时触压左感应区和右感应区的,最多只能触压到左感应区或者右感应区上的前后两个感应区60上的部分感应器62或者触压左感应区或右感应区的前后两个感应区60中的其中一个感应区60上的部分感应器62。
70.如有两个感应区60受力且两个感应区60处于推把5的宽度方向也即如图所示的前后方向的同侧(左侧或右侧),则判断为单手操控。理由同上。
71.其他情况比如有两个感应区60受力且两个感应区60处于推把5的宽度方向也即如图所示的前后方向的异侧(一个左侧,另一个右侧)或者长度方向的同侧或者有三个以上的感应区60受力,则判断为双手操控。
72.下面将对单手操控和双手操控的操控方法分别进行具体描述,先对双手操控的操控方法进行描述:
73.为了便于描述和区分,将左感应区对应于推把5前方的感应区60描述为左前感应区601,对应于推把5后方的感应区60描述为左后感应区602,同理,右感应区对应于推把5前方的感应区60描述为右前感应区603,对应于推把5后方的感应区60描述为右后感应区604。
74.需要说明的是,一般地每个感应区60上的感应器62的设置是按照正常成年人的手掌大小能触压三个或四个感应器62进行设计的。当双手成握住状态进行操控时,也就是说四个感应区60均为受力区,也即控制箱3中均能读取到四个感应区60的受力值。每个受力区的受力值应是该感应区60中受到触压的所有感应器62的受力值之和。在双手操控中,左感应区对应左驱动轮,右感应区对应右驱动轮。将左前感应区601的合力值命为f
左前
、左后感应区602的合力值命为f
左后
、右前感应区603的合力值命为f
右前
、右后感应区604的合力值命为f
右后
。左感应区的合力的差值命为f
左
,右感应区的合力的差值命为f
右
。以左感应区为例,如果f
左前
>f
左后
,则左驱动轮向后转动,也即表明使用者在向后拉助力推车,若f
左前
<f
左后
,则表明左驱动轮向前转动,如f
左前
=f
左后
,则表明左驱动轮静止,同理,右驱动轮的情况与左驱动轮的一样,不再赘述。则有,
75.如f
左后-f
左前
=f
右后-f
右前
>0,则推车向正前方运动;
76.如f
左后-f
左前
=f
右后-f
右前
<0,则推车向正后方运动;
77.如f
左后-f
左前
=f
右后-f
右前
=0,则推车静止不动;
78.如f
左后-f
左前
>0,且f
左后-f
左前
>|f
右后-f
右前
|,则推车向右前方运动;
79.如f
右后-f
右前
>0,且f
右后-f
右前
>|f
左后-f
左前
|,则推车向左前方运动;
80.如f
左前-f
左后
>0,且f
左前-f
左后
>|f
右前-f
右后
|,则推车向右后方运动;
81.如f
右前-f
右后
>0,且f
右前-f
右后
>|f
左前-f
左后
|,则推车向左后方运动。
82.如上示例,左右驱动轮组合成对应的运动,且左感应区的合力的差值和右感应区的合力的差值分别于左驱动轮和右驱动轮的转速成正相关。
83.假设每个感应区60的采集数值的范围是0-20n,驱动轮2允许的最大转速n
max
=60rpm。
84.如果双手握住四个感应区60中的连续三个相邻的感应器62(其他数量比如四个的计算方法类似),则合力值f的大小范围(0,60];
85.则n=kf,计算出k=1,则有n=f,也就是说任一驱动轮2的转速与其对应的感应区60的合力值(具体为左感应区或右感应区的前后两个感应区60的合力的差值)相等;
86.假设f
左前
=10,f
右前
=10,f
左后
=60,f
右后
=30;
87.由于(60-10)>0且(60-10)>|30-10|,则根据上述判断方法f左后-f左前>0,且f
左后-f
左前
>|f
右后-f
右前
|,可判断助力推车向右前方运动。
88.又因f
左后-f
左前
=50>0,f
右后-f
右前
=20>0得出f
左
=f
左后-f
左前
=50,f
右
=f
右后-f
右前
=20,再根据公式n=f,计算得出左驱动轮以转速n
左
=50rpm的速度正转,右驱动轮以n
右
=20rpm正转。也即控制箱3通过上述控制策略控制左驱动轮以转速50rpm的速度正转且控制右驱动轮以20rpm的转速正转。
89.下面对单手操控的操控方法进行描述:
90.以单手握住左感应区为例进行说明。当单手握住相邻三列感应器62时,感应器62只采集到左感应区的前后两个感应区60有数值变化,则和双手握住采集到四个感应区60的数值有变化不同状态时,采用不同的计算方式。
91.首先控制箱3分别计算左前感应区601的合力值f
左前
和左后感应区602的合力值f
左后
,将两者做差比较,分析判断推车应该是前进还是后退,如果f
左前
>f
左后
,则表明推车后退,反之,则前进。
92.第二步,计算左前感应区601和左后感应区602中对应的两个感应器62的合力值,为了便于描述和区分,将左前感应区601的感应器62由左到右的方向依次编号为1、2、3
……
,同理,左后感应区602的感应器62由左到右的方向依次编号为1、2、3
……
,将左前编号为1的感应器62和左后编号为1的感应器62的合力值命为f
左1
=f
左后1-f
左前1
(此处规定向前方向也即左后感应区602的感应器62的受力方向为正方向,向后也即左前感应区601的感应器62的受力方向为负方向),其余以此类推。
93.第三步,将受力区中的前后两个受力区分为左受力区和右受力区,先去除合力为零的受力点位,再分左受力区和右受力区。下面有两种情况:
94.1.如果受力点是奇数(>2)个,以编号为3、4、5三个感应器62为例说明,则去除中间的受力点位也即编号为4的前后两个感应器62,左边的前后编号为3的两个感应器62为左受力区对应左驱动轮且合力值f
左3
,右边的前后编号为5的两个感应器62为右受力区对应右驱动轮且合力值f
左5
。
95.2.如果受力点的个数为偶数个,以编号为2、3、4、5四个感应器62为例说明,则将编号为2和3的前后共四个感应器62作为左受力区对应左驱动轮且合力值为f
左2
f
左3
,编号为4和5的前后共四个感应器62作为右受力区对应右驱动轮且合力值为f
左4
f
左5
。
96.第四步,根据左受力区和右受力区的合力大小,计算出对应的驱动轮2的转速大小,即可实现助力推车的运动。需要说明的是,驱动轮2的转速的计算方法同双手操控的计
算方法也即根据驱动轮2的转速与合力值成正相关的关系计算,此处不再赘述。
97.根据本发明的一些实施例,此助力推车的运动只需控制两个驱动轮2进行不同形式的运动就可实现前进、后退、转向。当左右两个驱动轮2同向转动且转速相同时,则推车前进或后退。当左右两个驱动轮2同向转动且转速不同时,则推车往转速慢的驱动轮2的方向转弯。当左右两个驱动轮2反向转动且转速相同时,则推车原地旋转。具体的,左右驱动轮同时正转且速度相同时,则助力推车向正前方运动。左右驱动轮同时正向且转速不同时,则往转速慢的驱动轮2的方向转弯,两驱动轮2的速度差越大,转弯半径越小。当左右驱动轮一正转一反转且转速相同时,助力推车会原地旋转。当左右驱动轮同时反向运动且转速相同时,则向正后退。当左右驱动轮同时反向且转速不同时,则往转速慢的驱动轮2的方向转弯,两驱动轮2的速度差越大,转弯半径越小。
98.本发明实施例还公开了一种应用于医疗机器人的电动助力推车,如图1所示,包括车架1、设于车架1底部后端的驱动轮2和设于车架1底部前端的万向轮,设于车架1上的用于为驱动轮2供电并可作为备用电源的电池4及设于所述车架1上的与驱动轮2电连接的控制箱3,车架1的后端上方设有推把5,推把5安装有微变形阵列应力感应系统6,微变形阵列应力感应系统6与控制箱3电连接且在使用者手握推拉过程中执行上述实施例的操控方法。
99.具体的,如图2和图3所示,微变形阵列应力感应系统6包括设于每个感应区60内的电路板61、设于对应电路板61上的沿推把5的长度方向呈阵列排布的若干感应器62(示例的,图2和图3中每个感应区60的感应器62的数量为六个)、设于电路板61外侧的覆盖硅胶膜64及与每个感应器62一一对应电连接且突出于对应的覆盖硅胶膜64外的触压凸起63,通过按压触压凸起63,使得触压凸起63内端与感应器62接触导通电路,感应器62采集受力值并发送给控制箱3进行处理。
100.需要说明的是,本发明的电动助力推车不仅仅可以用于医疗行业,在其他需要用到推车的行业也适用。
101.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。